低速AUV 航渡過程中減少洋流影響的方法
2020-04-17 18:58:12周偉江馬偉建
艦船科學技術 2020年2期
劉 甲,周偉江,馬偉建
(1. 中國人民解放軍92493 部隊,遼寧 葫蘆島 125000;2. 中船重工七〇五研究所昆明分部,云南 昆明 650102)
0 引 言
針對洋流對AUV 航行軌跡的影響,研究人員已經進行了大量的分析和研究。高富東[1]建立了一種AUV在洋流和波浪擾動作用下的數學模型。范雙雙[2]探討了洋流影響下的水下滑翔機多體動力學模型,為洋流中滑翔機的運動預測及控制器和觀測器設計提供參考。房萍萍[3]研究了側向流對AUV 運動姿態的影響,并得出了洋流影響下的航行器水動力特征。這些研究成果為研究洋流對AUV 的影響機理提供了較好的參考依據。
另一方面,研究人員也針對洋流環境中的AUV 航路規劃和控制問題進行了大量研究。姚鵬[5]針對復雜海洋環境下AUV 三維避障問題,提出了一種高效的修正導航向量場方法,但是該算法的研究對象是AUV 的避障問題,與減小洋流影響的方法存在差異性。苗潤龍等[6]提出了遺漏海灣和重復海灣及其進入點、退出點和門戶的路徑規劃環境表達概念,并將其應用在基于行為的鋸齒形完全遍歷路徑規劃改進算法中,有效地減少了海洋自主航行器全覆蓋地形測繪的重復區域和遺漏區域,但是該路徑規劃算法并未考慮洋流的影響。魯燕[7]針對定向洋流干擾下的AUV 航路規劃問題,提出了一種基于改進模糊控制理論的運動規劃方法,但是該方法需要經歷狀態感知、動作、效果比較和監控、再規劃等步驟,算法過于復雜、實施難度大。文獻[8]分析了水下運載器在存在復雜干擾、運動模型未知的情況下的軌跡跟蹤控制問題,并提出了滑模控制算法。為了減弱抖振現象對系統帶來的影響,Levant 等[9–10]設計了一種新型的2 階滑模控制方法,T.Salgado[11]和Imran[12]等成功地將此方法應用到了AUV 的航跡跟蹤控制上,并取得了良好的控制效果,但是這類算法考慮的環境條件與本文考慮的洋流影響條件存在一定差異,適用性不足。為此,需要設計一種簡單有效的減小洋流影響的方法。
1 洋流對低速AUV 的影響
1.1 低速AUV 的特點
低速AUV 除了航速低航程遠,還具備非固定航向的特點。低速AUV 工作模式分為水面遙控航行模式和程序任務航行模式,本文只考慮程序任務航行模式。在程序任務航行模式下,低速AUV 啟動前通過讀取程序任務文件,設置程序任務航行信息,同時控制系統將當前位置、姿態等信息發送給規劃決策系統,然后規劃決策系統開始規劃航行路線(即一系列航路控制點)。啟動后,控制系統在每個航行周期內,將當前位置、姿態等信息發送給規劃決策系統,然后規劃決策系統開始規劃航行路線,并且分別向控制系統和動力系統發送控制命令和動力命令,控制系統和動力系統再分別操作舵機和電機進行航速和航向控制,到達控制點后,再采用同樣的方式控制AUV 向下一個航路控制點航行,直至到達目標點。AUV 的信息流向如圖1所示。在每個周期內,控制系統向規劃決策系統反饋當前的位置和姿態信息,隨后規劃決策系統根據設定的程序任務信息和當前的位置和姿態信息,解算出相應的航速和航向信息,分別發送給動力系統和控制系統完成姿態控制。可以看出,在程序任務航行模式下,低速AUV 的航向不固定。
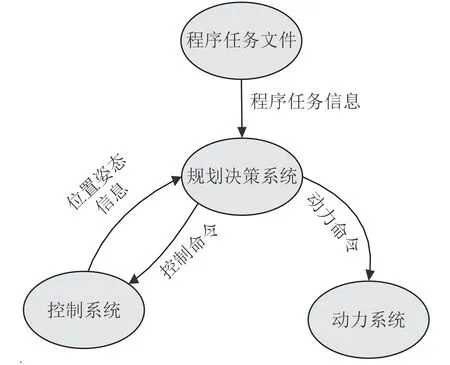
圖 1 AUV 信息流向圖Fig. 1 Information flow direction figure of AUV
1.2 洋流對低速AUV 航行的影響
根據經驗分析,洋流對低速AUV 的影響主要分為2個方面:一是垂直于AUV 航行方向的洋流,會使低速AUV偏離航線,使其無法沿既定的軌跡直線航行;二是平行于AUV 航行方向的洋流,會降低低速AUV 的航行速度。
1.3 實航影響分析
事實上,上述影響已經在某型AUV 實航過程中有所體現,在某次實航過程中,經測量當地流速約2 kn,流向279.7°(正北為0°,北偏西為正,即流向大約為正東)AUV 的設定航速為6 kn(約3 m/s),如圖2 所示。AUV 自S 點啟動向M 點航行時,由于頂流的原因航速大約為2.25 m/s,而在M 點向D 點航行時,由于順流航速大約為3.3 m/s,航速差大約為1 m/s,這與流速2 kn 是吻合的。特別是在圖中由B 點向正南方3 km外的C 點航行過程中,設定速度為6 kn(約3 m/s),AUV 的實際航行軌跡并未像預先設計的直線航行,而是形成一段向東有弧線突出的“半棗核型”軌跡,速度也受到影響不斷下降,平均航速約為2.5 m/s。航行軌跡如圖2 所示,航速的變化如圖3 所示。
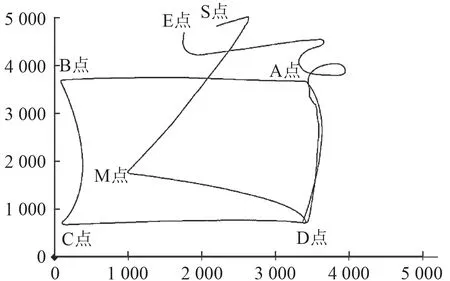
圖 2 低速AUV 航行軌跡圖Fig. 2 Low-speed sailing tracks figure of AUV
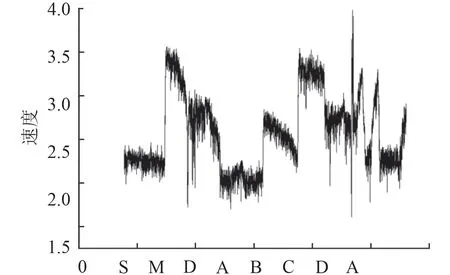
圖 3 AUV 航速變化圖Fig. 3 Sailing speed change figure of AUV
可見,AUV 的航行速度較低,受到的洋流影響是比較大的,但是由于AUV 的控制模型是“向目標點”航行,而不是“固定航向”航行,所以AUV 在航行過程中不斷調整航向,最終還是可以到達目標點,但是會偏離實際的軌跡,并且速度和航程也會下降。
2 潮流的特點及對低速AUV 的影響機理分析
2.1 潮流的特點
在引潮力的作用下,海水做周期性的水平運動,稱為潮流。潮流和潮汐是潮波運動過程的2 個方面,潮流的一些特征(如日周期、半日周期、大潮流、小潮流等)與潮汐現象相似,但是潮流更多受地形、海底摩擦及地球自轉的影響。
2.2 潮流的運動及簡化
由于潮流主要是水平運動, z方向的流速 ω可以略去不計。假定水平分速度 u 和 v沿深度均勻分布,黏性力和離心力可以略去,非線性慣性力可以不考慮,則可以得到簡化的潮波運動方程為:
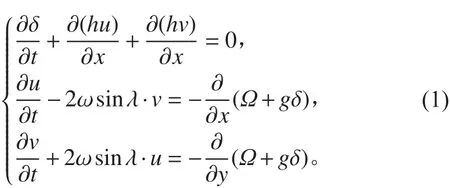
式中: δ為潮波的自由表面到平均海平面的高度; h 為水深; u為地球自轉的角速度; ω sinλ 為 ω在觀測點的分量; Ω為引潮力勢函數;g 為重力加速度;
對于一元推進潮波,地球偏向力和摩擦力的作用可以略去,并認為潮波已經轉為不計潮力的自由潮波運動,在這種情況下的運動方程和連續方程為:
在海面上的垂向運動可視為一簡諧函數,即

式中: k 為波數,代入(2)式中,積分得到:

2.3 潮流對低速AUV 的影響機理
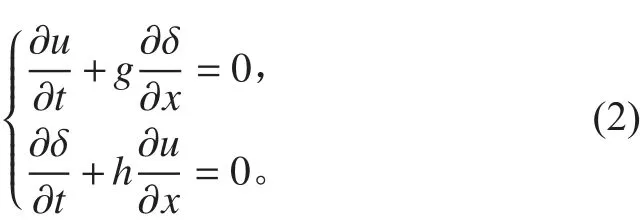
潮流對低速A U V 的影響主要是作用在低速AUV 上的流體動力,以低速AUV 為研究對象,無論洋流的流向如何,總能被分解為沿低速AUV 縱軸( x 軸)方向、沿低速AUV 橫軸( z軸)方向、沿低速AUV 立軸( y軸)方向3 個方向,如圖4 所示。其中沿低速AUV 立軸( y軸)方向(即垂直面)的洋流幾乎為零,且它主要影響低速AUV 的航行深度,因此在分析時主要考慮沿低速AUV 縱軸( x軸)方向、沿低速AUV 橫軸( z軸)方向的洋流影響(即水平面的洋流影響),如圖4 所示。
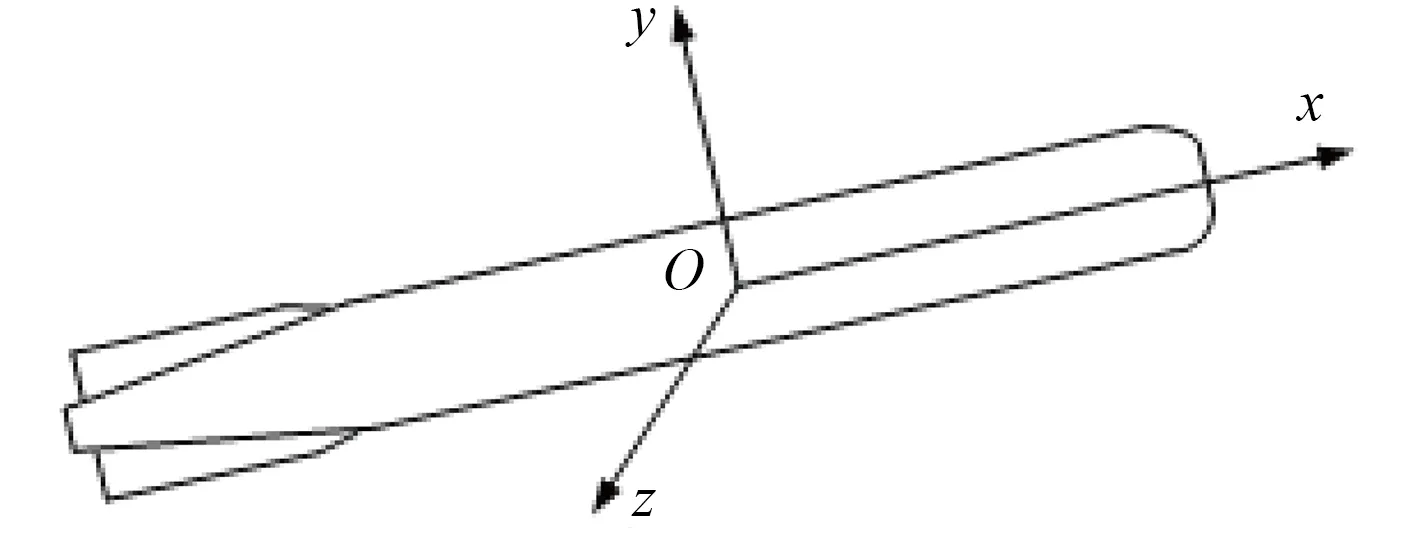
洋流作用在低速AUV 上的流體動力,可以等效為在低速AUV 的縱軸( x 軸)和橫軸( z軸)方向分別疊加了一個速度, x軸的疊加速度影響了低速AUV 的實際航行速度, z軸的疊加速度影響了低速AUV 的實際航行軌跡。
設低速AUV 航向為 θ,航速為 v0, 洋流流向為 φ,流速為 v1, 低速AUV 航行軌跡的航跡向為 η,則存在以下關系:
沿航路的速度分量

垂直航路的速度分量

航跡向(低速AUV 的實際航向)

低速AUV 的實際航速

通過對上式分析,當 vz不為0 時,即表示存在1 個側向力使低速AUV 偏離設定航路;當流向和航向不垂直時,流速會在低速AUV 航向方向產生1 個分量,使低速AUV 航速增大或減小。此外,流向與低速AUV航向垂直時,洋流對低速AUV 的航向影響最大。
洋流對高速AUV 影響不大,是因為高速AUV 航速較大,一般為幾十節,以流速2 kn,流向與高速AUV 航向垂直,航行器航速50 kn 為例, vx=50 kn,vz=2 kn,對高速AUV 航向的影響為2/50=0.04 rad,約2°。如果高速AUV 以6 kn 低速航行,對高速AUV 航向的影響為2/6=0.3 rad,約19.1°,相差近10 倍。對航速影響的比例是0.04∶0.3,相差近8 倍。
3 減小潮流對低速AUV 航渡影響探討
潮流對低速AUV 航渡的影響主要是通過沿航路方向的分量影響低速AUV 的實際航速,通過垂直航路方向的分量影響低速AUV 的實際航向。因此,要減小潮流對低速AUV 航渡的影響也是從這2 個方面入手。
圖 5 受洋流影響示意圖Fig. 5 Effects on ocean current schematic diagram
1)減小洋流對低速AUV 航速的影響。可采用速度閉環控制的方式來實現,即動力系統的控制目標不再是螺旋槳轉速,而是低速AUV 的航行速度。
2)減小洋流對低速AUV 航跡偏移量的影響。從式(8)中分析應該是使 vz=0,這樣低速AUV 的航跡向等于航向,就不會偏離預設航路。由于實際航渡的需要,低速AUV 不可能總是順流或逆流航向,不可避免地會出現低速AUV 流向和航向的差不等于0 的情況,這就要求,低速AUV 要在垂直航路方向產生速度分量,抵消洋流影響,使垂直航路方向合速度為0。
針對第2 類方案進行研究,即減小洋流對低速AUV 航跡偏移的影響,使航跡接近于直線。為了實現上述目標,提出3 種決策方法。
3.1 加裝水平推進器
在低速AUV 中心位置加裝水平方向的推進器,抵消洋流在這個方向的速度。該方法的優點是低速AUV 的航跡始終沿預設航路方向,可以最大限度地發揮主推進器效能,缺點是在小型或微型AUV 因空間限制實現比較困難。
3.2 航路糾正
航路糾正是在不考慮加裝水平方向推進器的情況下,使低速AUV 的航向不沿預設航路方向,在垂直預設航路方向產生一個速度分量,抵消洋流在這個方向的速度。航路糾正又分為主動預防偏離航路和被動糾正偏離航路2 種方法。
主動預防偏離航路是根據洋流的流速、流向計算洋流在垂直預設航路方向的速度分量,調整低速AUV 航向、航速,使低速AUV 在垂直預設航路方向的速度分量與洋流在垂直預設航路方向的速度分量大小相等方向相反。該方法的優點是低速AUV 始終在航路上,沒有航程損失,缺點是在每個航渡周期內需要獲取(存儲或測量)當地洋流的流速、流向信息,難度較大,特別是在非我方控制的陌生海域。
被動糾正偏離航路的方法是在航渡時期內將航向始終拽指向目標點,在偏離航路的情況下,被動返回航路,該方法的優點是不需要獲取洋流的流速、流向信息,缺點也是存在航程損失。
3.3 增加航路控制點
通過仿真發現,低速AUV 偏離預設航路的偏移量與距離目標點的距離有關,距離目標點越遠,到達目標點的時間越長。
以圖6 中由B 點向正南方3 km 外的C 點的航渡過程為例,設定初始速度為6 kn(約3 m/s),做以下3 種情況的對比實驗:
1)不插入航路控制點時,此時只有一個航路控制點,即點C,低速AUV 到達目標點的時間較長,洋流對低速AUV 影響效果較明顯,航跡最大偏差約為750 m。
2)在中間每1 km 處插入2 個航路控制點時,此時有3 個航路控制點(包括點C),洋流對低速AUV 影響效果就減弱,航跡最大偏差約為500 m。
3)在中間每500 m 處插入5 個航路控制點時,此時共有6 個航路控制點(包括點C),洋流對低速AUV 影響效果就明顯減弱,約為50 m,航跡最大偏差約為350 m。
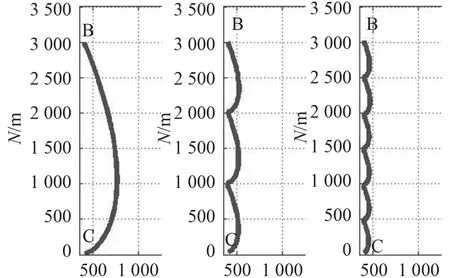
圖 6 不同航路控制點下的航跡圖Fig. 6 Tracks figure of different sailing control points
這3 種情況下的計劃航程、航跡最大偏差、航跡最大偏差率(航跡最大偏差/計劃航程)如表1 所示。可以發現,采用在預設航路上多設一些航路控制點,減小每2 個航路控制點之間的距離,可以減小洋流對低速AUV 航跡偏移的影響,使航跡接近于直線。這種決策方法相對于安裝水平方向的推進器的方法和航路糾正的方法,約束條件更少,更加靈活和便捷性更強。
4 驗 證
實航實驗的條件如表2 所示。
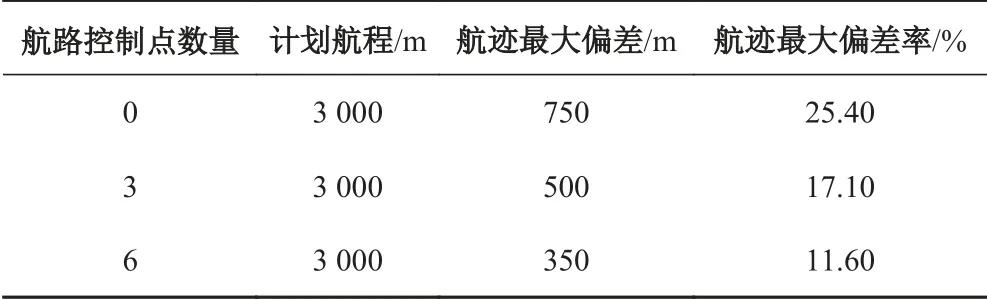
表 1 仿真實驗不同航路控制點下的偏差統計Tab. 1 Deviation statistics of simulative experiment on different sailing control points condition
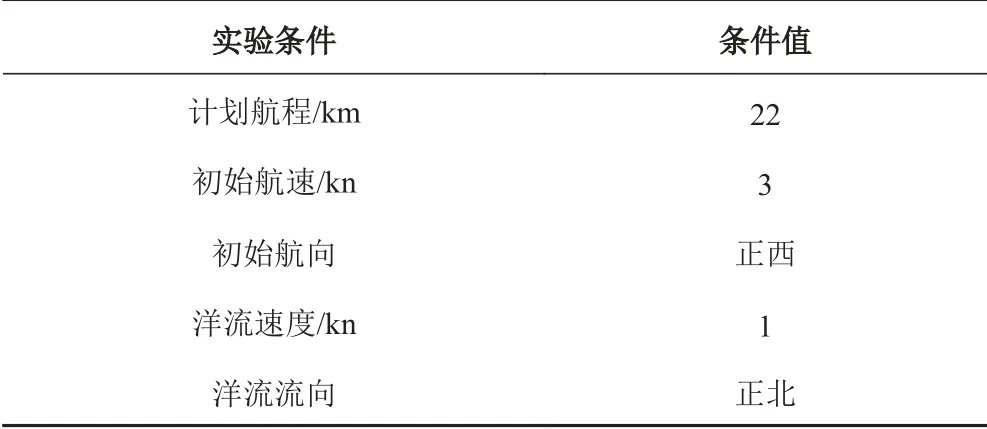
表 2 實航實驗條件Tab. 2 Real experiment condition
在所提的3 個決策方法中,前2 個方法可以用邏輯分析得出,不需實驗驗證,因此僅對第3 種方法進行驗證。為了驗證方法的正確性,對實航數據進行統計分析。
AUV 從原點出發沿正西方向航行約22 km,每隔1 km 插入一個航程控制點。實航實驗的軌跡如圖7 所示。圖8 為實航實驗的0~4.5 km 部分軌跡圖。由于實航實驗成本較高,未進行實航對比實驗,因此采用仿真的辦法進行驗證。
仿真實驗的實驗條件與實航實驗條件完全相同,軌跡如圖9 所示。圖10 為仿真實驗的0~4.5 km 部分軌跡圖。
實航實驗和仿真實驗的實驗結果對比如表3 所示。插入控制點的方法航跡偏差率為0.2%,不插入控制點的方法航跡偏差率為2.87%,二者相差10 倍。實驗結果表明,插入航路控制點的方法可以有效減小洋流對低速AUV 航跡偏移量的影響,降低航跡偏差率,使航跡更接近于直線。
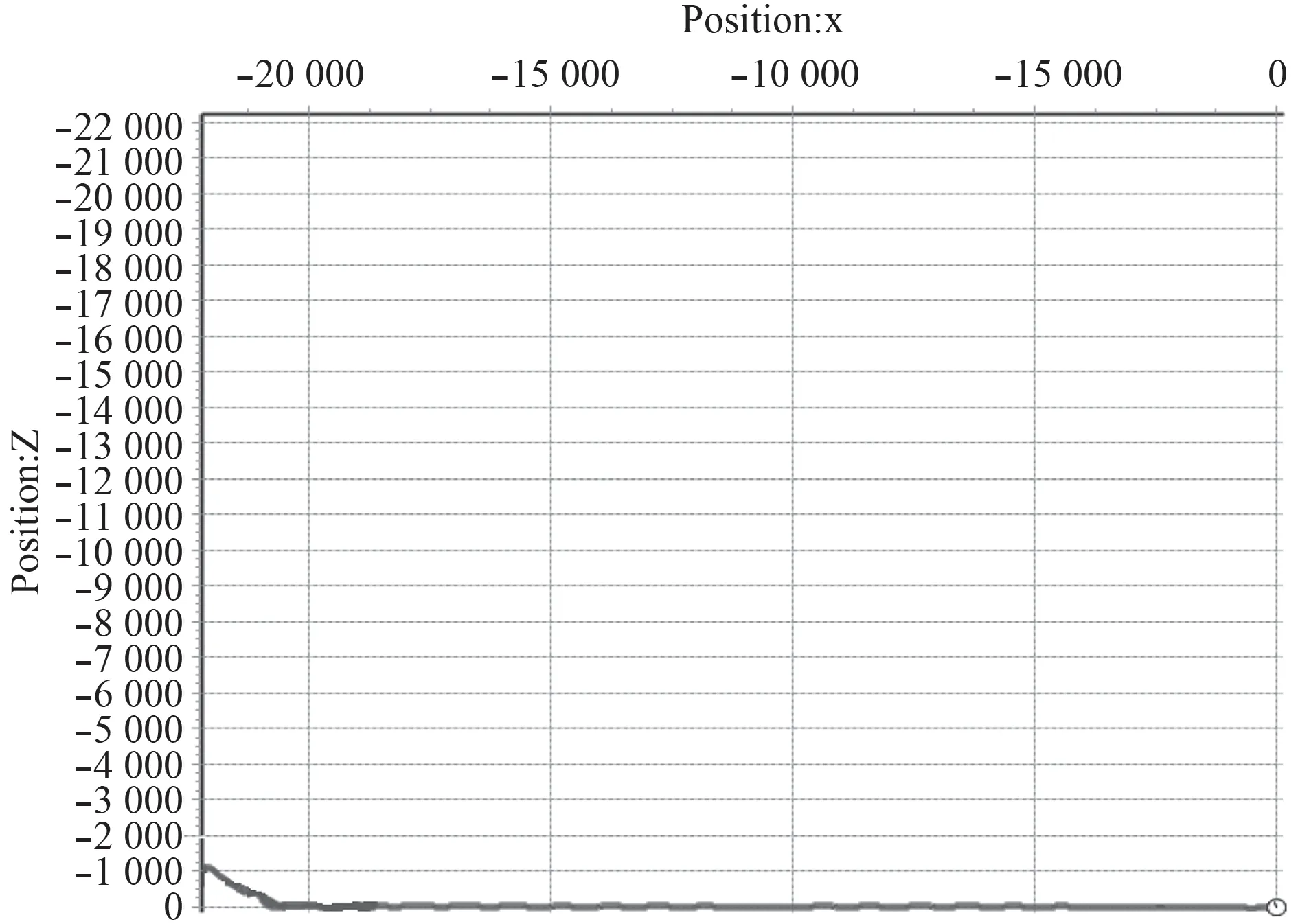
圖 7 AUV 實航軌跡圖Fig. 7 Real experiment tracks figure of AUV
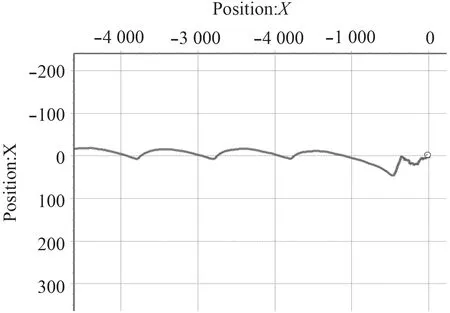
圖 8 AUV 實航實驗的0~4.5 km 部分軌跡圖Fig. 8 0~4 km part of real experiment tracks figure of AUV
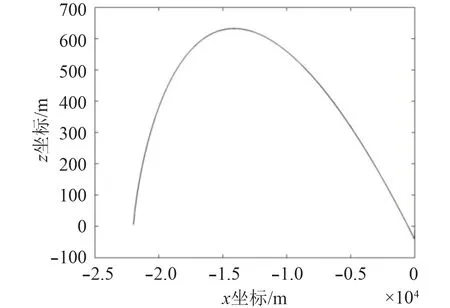
圖 9 AUV 仿真實驗軌跡圖Fig. 9 Simulative experiment tracks figure of AUV
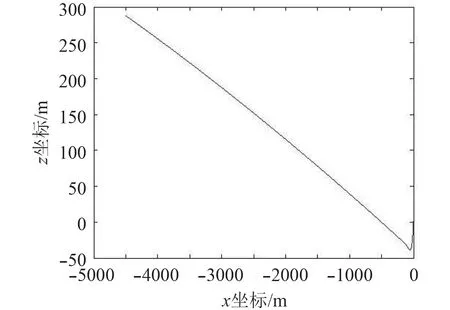
圖 10 AUV 仿真實驗0~4.5 km 部分軌跡圖Fig. 10 Simulative experiment 0~4 km tracks figure of AUV
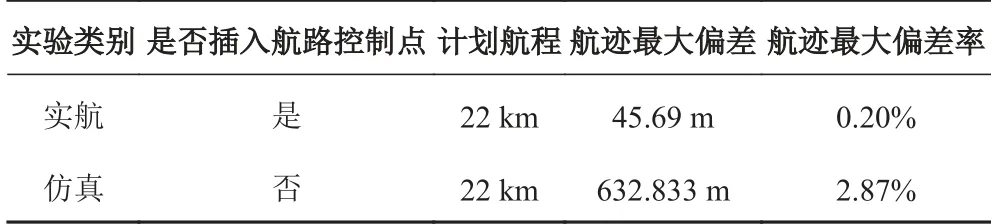
表 3 實航實驗與仿真的對比Tab. 3 Comparation between real experiment result and simulative experiment result
5 結 語
本文通過分析AUV 在航行階段受到洋流影響現象,探究了洋流對AUV 的影響機理,有針對性地提出幾種減小洋流影響的方案,并對預設航路增加控制點的方案進行仿真驗證。仿真結果證明預設航路控制點的方法能有效減小洋流對低速AUV 航跡偏移量的影響,降低航跡偏差率,使航跡更接近于直線。該方法在實航試驗中也得到了驗證,并已得到實際工程應用。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
當代陜西(2021年2期)2021-03-29 07:41:24
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38