單曲柄雙搖桿無相差撲翼驅動機構的設計與仿真
2020-04-22 06:29:48王鵬程王浩顧光健
機械制造與自動化 2020年1期
關鍵詞:優化
王鵬程,王浩,顧光健
(南京航空航天大學 航天學院,江蘇 南京 210016)
0 引言
仿生撲翼飛行器是一種新概念飛行器,仿生撲翼飛行器的研究是一個多學科多領域的交叉研究項目,需要綜合運用生物學和機械運動學的相關知識。其主要仿生研究昆蟲及鳥類的自然飛行機制,如昆蟲利用其薄如蟬翼的翅膀高頻振動,可以實現前飛、倒飛、側飛等特技飛行;如鳥類可通過鎖定機翼保持滑翔姿態,實現不需要外力作用下低耗能的遠距離飛行。
仿生撲翼飛行器由于體積小巧、便攜、靈活的飛行,優良的隱蔽性和高效率低能耗等優點得到了廣泛的關注,其可微程度遠遠大于旋翼和固定翼,而且沒有螺旋槳或噴射裝置,從而可以迅速地起飛、加速、懸停,在民用和國防上有著廣泛的應用前景[1]。
1 單曲柄撲翼驅動機構
驅動機構是撲翼飛行器的核心部分,其作用是把執行機構的運動轉換為機翼的拍打運動,從而產生撲翼飛行器所需要的空氣動力。
單曲柄雙搖桿機構運動簡化如圖1所示,這是把一個圓周驅動轉化成兩個左右往復運動的機構,其結構十分緊湊,質量較輕,較容易微小化;但直接使用存在的缺點是左右兩側搖桿機構存在相位差,會使左右機翼產生的瞬時升力不等,造成飛行器晃動,影響飛行過程中的穩定性和操作性[2-4]。

圖1 單曲柄運動簡化圖
因此,能否有效減少不對稱搖桿機構的相位差,直接關系到撲翼飛行器的飛行性能。
已有研究人員對單曲柄機構優化設計進行深入研究,力求改善機構左右運動的不對稱性。如圖2所示,荷蘭代夫特科技大學的“DelFly I”[5]和日本東京大學的“BTO”[6]撲翼飛行器在傳統不對稱傳動機構的基礎上進行了改進,將兩個連桿與曲柄的轉動副分離,用成一定夾角固結的曲柄連接左右兩連桿,從而提高兩側搖桿的同步性能,飛行試驗驗證了其可行性。

圖2 “DelFly I”飛行器
周凱[7-8]和張亞峰[9]等運用MATLAB 優化工具箱,通過設定目標函數和約束條件來優化不對稱搖桿機構的各桿長度,最終使兩側搖桿相位差達到最小。董二寶[10]等則采用解析法求得運動對稱機構的理論最優解,建立優化設計線圖和經驗公式,可為實際應用提供設計參考。
本課題為了改善這種撲動不對稱性,在單曲柄撲翼機構上加入Watt連桿機構,利用Watt連桿機構產生的近似直線運動軌跡。結果發現,加入Watt連桿機構之后,左右機翼具有非常好的對稱性,兩翼之間的相位差可忽略不計。
2 建立三維模型
設計模型依照鳥的質量及飛行姿態進行仿生設計[11-13],確定了仿生撲翼飛行器機身長度約250mm,整個翼展長300mm。驅動機構設計應滿足設計撲動參數要求且使得結構更加緊湊合理。
首先確定減速裝置。由于微撲翼飛行器撲動頻率高,負載相對較大,采用直流電機無法驅動直流撲翼機構。通常的做法是采用齒輪減速器,以犧牲一定的轉速作為代價來增大驅動轉矩。本文選擇了二級展開式圓柱齒輪減速組,是由一級齒輪和二級齒輪組成,其中:一級齒輪與無刷電機齒輪相嚙合,二級齒輪與一級齒輪相嚙合,無刷電機齒輪驅動一級齒輪轉動從而帶動二級齒輪傳動。
然后進行整機建模。通過三維軟件SolidWorks進行各個零部件設計以及裝配,圖3為撲翼機構三維實體模型,圖4為爆炸視圖。該機構具有兩個分支(COAE和COBF),由于鉸接點A和B不重合,導致左右撲動不對稱。

圖3 三維模型

圖4 爆炸視圖
通過Solidworks軟件運動學仿真,仿真表明模型各部件之間運動無干涉。
3 Watt連桿機構
JAMES Watt[14]于1782年發明了蒸汽機,其中發明了平行四邊形機構,該平行四邊形機構還整合了瓦特氏直線機構。在大杠桿左邊外側是帶動比較粗條的蒸汽機活塞桿件,而在內側則帶動比較細支的氣閥桿件。該機構設計能保證同時提供蒸汽機活塞桿與氣閥桿正確的垂直方向往復運動,解決了如何利用連桿機構進行直線運動的難題。
圖5所示為Watt連桿的最簡單形式,它由三連桿所組成,即AB、BC和CD。其中,A和D需要固定在空間中,但是可以自由旋轉,從而帶動B和C做圓弧運動。AB與CD兩連桿具有相同的長度,耦合連桿BC的中點P在中心位置時,連桿AB、CD和BC分別水平和垂直。

圖5 最簡單的Watt連桿
值得注意的是,AB的長度可能與CD的長度不相等。一般形式的Watt連桿連接如圖6所示,其中P點符合的比例為:
有用的一段僅是B的小位移,或等效C的小位移。其中P點的完整軌跡是圖6所示的一個傾斜“8”型軌跡,其中心點附近是可以利用的近似直線軌跡。

圖6 Watt連桿及其耦合軌跡
因真正需要利用到就是P點的運動軌跡,所以關心的只是如何更好地產生近似直線軌跡。耦合點P的位置可由5個參數計算得到,分別是3個連桿的桿長、固定鉸鏈A和D之間距離、從x軸正向逆時針旋轉到連桿AB的角度。
通過合適地選擇3個連桿的長度和位置(圖7),為了產生更好的直線軌跡,Watt遵循了以下公式:

圖7 Watt軌跡圖
這種Watt直線機構原理簡單,容易實現,利用它的近似直線運動軌跡,用在單曲柄雙搖桿機構中,使得中心鏈接能夠執行直線運動,保證了左右拍動完全對稱,同時增加了撲動的緊湊性和穩定性,提高了飛行效率。其三維撲翼機構圖如圖8所示。

圖8 三維撲翼機構
4 加入Watt機構前后比較分析
4.1 Adams仿真分析
在Adams中建立單曲柄雙搖桿機構簡化模型(圖9),添加運動副,添加驅動,進行一個周期的運動仿真,主要分析左右機翼的撲翼角度和角速度的變化。

圖9 Adams仿真
4.2 優化前后相關參數的比較
搖桿與水平線的夾角為撲翼角。當搖桿在水平面上方時,撲翼角為正,反之為負。當搖桿向下運動時,搖桿角速度為正,反之為負。優化前后相關參數的比較如圖10-圖13所示。

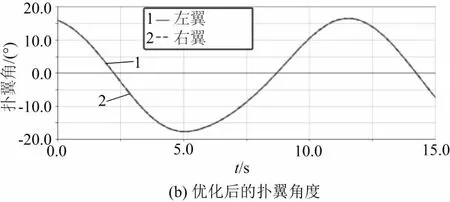
圖10 加入Watt前后的撲翼角的比較
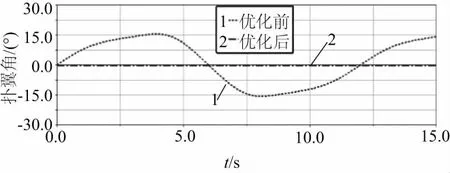
圖12 優化前后撲翼角度之差的比較
從以上優化前后的參數曲線圖可知:
1) 在沒添加Watt機構之前,在t=3.8s時,左右撲翼角度之差最大達到15°;在t=6s時,左右撲翼角速度之差最大達到14°/s;

圖13 優化前后撲翼角速度之差的比較
2) 當在添加Watt機構之后,發現撲翼角之差和撲翼角速度之差都為0,即左右撲翼運動完全對稱;
3) 在加入Watt機構之后,在保證了左右機翼運動完全一樣的同時,缺點是減小了上下撲翼角度的范圍,從之前的60°范圍變成了40°的范圍。
5 結語
優化改進了單曲柄雙搖桿撲翼機構的左右不對稱,在Adams中仿真分析了撲翼角度和撲翼角速度,為同類型的驅動機構設計提供了理論設計基礎,對其他類型的微撲翼驅動機構設計也有很好的借鑒意義。
通過在單曲柄雙搖桿中加入Watt機構之后,左右撲翼角之差和撲翼角速度之差的幅值比加入之前顯著降低,這也驗證了該優化方法的正確性和可行性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
