基于TMS320F28335的RDDV閥控制器設計
2020-04-22 06:29:52阮崢毛良魏浪
機械制造與自動化 2020年1期
阮崢,毛良,魏浪
(航空機電系統(tǒng)綜合航空科技重點實驗室 航空工業(yè)南京機電液壓工程研究中心,江蘇 南京 211106)
0 引言
隨著電子技術的進步,伺服閥的研究和應用得到了迅猛的發(fā)展。電液伺服閥是較早出現(xiàn)的一種伺服閥,它能在接受電信號后輸出調制的流量和壓力,但由于其抗污染能力差,在應用時受到很大限制。為解決這種問題,國內外廠家推出直接驅動閥(DDV)[1-2]。直接驅動閥利用直線位移力馬達直接驅動閥芯,具有質量輕、體積小、費用低、內漏小、可靠性高等優(yōu)點。旋轉直接驅動閥(RDDV)是直接驅動閥的一種,出現(xiàn)在20世紀90年代。國外將電子控制器運用到旋轉直接驅動閥中,使這類伺服閥數(shù)字化應用更加廣泛。
近些年,國內在這方面的研究也在廣泛展開,但是在RDDV閥的控制方面還比較少。基于RDDV閥的特點,目前實際應用的RDDV閥控制器還是主要以模擬電路搭建的為主,結構復雜,可靠性低,控制規(guī)律改變時更改調試困難。基于這種現(xiàn)狀,本文設計一種新型旋轉直接驅動閥控制器。控制器以TMS320F28335為核心,降低控制電路復雜程度,減小體積,提高可靠性。
1 旋轉直接驅動閥簡介
旋轉直接驅動伺服閥(RDDV)是直接驅動閥的一種,主要由滑閥級、有限轉角力矩電機以及相應的控制器構成,通過電機軸端的偏心機構將電機的旋轉運動轉化為閥芯的直線運動[3]。之后,閥芯突肩與殼體通油槽形成開口,讓油量通過,因此可以通過控制閥芯的位置來控制流量的大小和方向。RDDV伺服閥內部含有位置傳感器,這是一種線性霍爾傳感器,可以精確測量閥芯位置,并提供位置反饋信號。反饋信號與電機旋轉角度成線性關系,如圖1所示。控制器利用反饋信號進行運算,輸出PWM波驅動有限轉角力矩電機,就可以實現(xiàn)閉環(huán)控制。實際使用時,要給位置傳感器供+10VDC。目前RDDV伺服閥廣泛應用于航空、航天、民用機電等行業(yè)的伺服控制。
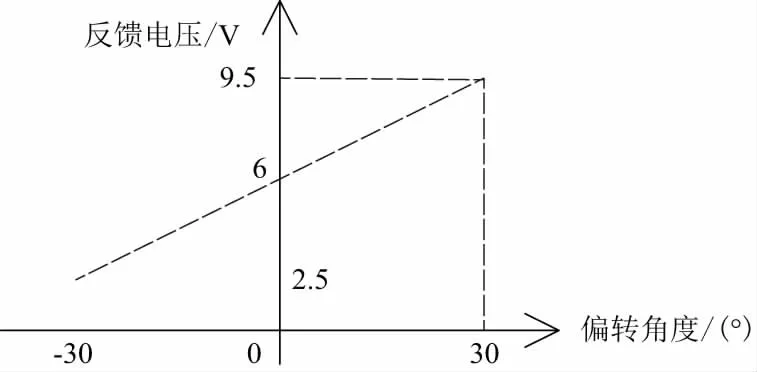
圖1 典型RDDV閥轉角-電壓輸出特性
2 控制器方案
控制器整體結構如圖2所示。LMD18200T為驅動芯片,DSP為主控制器。RDDV上的反饋傳感器測量有限轉角力矩電機當前的偏轉角度。上位機輸入指令為RDDV的目標偏轉角度(實際上對應于液壓的開口方向和流量)。DSP獲得指令和反饋信號后進行運算,得到電機偏轉的方向和轉速;再輸出兩路PMW波,經(jīng)電平轉換芯片轉換后送至LMD18200T的PWM輸入腳和DIR輸入腳,由此驅動電機旋轉,進而帶動閥芯運動;同時傳感器測量電機偏轉角度并由A/D轉換為數(shù)字信號,與指令進行比較,重復以上過程,直到電機的偏轉角度滿足要求。該控制器運用數(shù)字控制技術,具有運算速度快、結構簡單、可靠性高的特點。
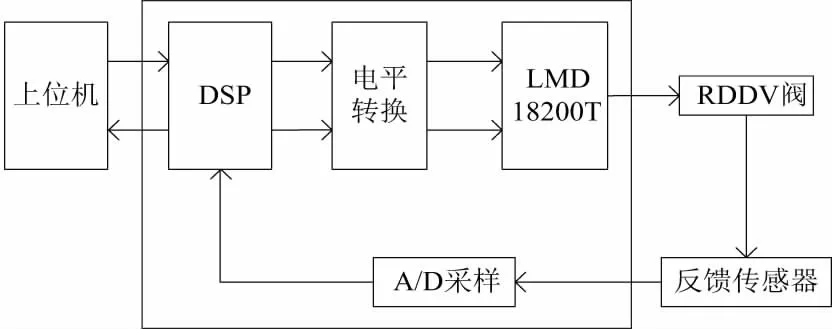
圖2 控制器結構框圖
3 控制器硬件設計
LMD18200T是一種由某半導體公司生產的功率集成電路,專用于直流電動機驅動,內部包括4個DMOS管構成的H橋及其邏輯控制電路。芯片內部的H橋驅動器由4個DMOS管構成,通過充電泵電路為4個DMOS管提供柵極控制電壓,允許工作頻率可通過在1、2腳和11、12腳之間接入電容來提升。引腳2和10是輸出端,接直流電機電樞的兩端。引腳3、4、5分別為方向輸入端、剎車輸入端、PWM信號輸入端,三者配合使用,控制電機的轉向和轉速。LMD18200T的驅動方式有兩種。第一種是單極性驅動,PWM信號由方向信號與幅值信號組成。幅值由PWM信號的占空比決定,零脈沖時代表零電壓,方向則由方向信號的高低決定[4]。DIR腳為高電平時電機正轉,DIR腳為低電平時電機反轉。使用時將方向信號接到方向輸入端,將PWM信號接到PWM輸入端。第二種是雙極性驅動,PWM信號中既包含方向信息又包含幅值信息,占空比為50%時代表零電壓,>50%時電機正轉,<50%時電機反轉。使用時,將此信號加到方向輸入端,同時將PWM輸入端置高電平。
驅動部分原理圖如圖3所示。PWM腳為高電平,DIR腳為控制信號,兩個信號都由TMS320F28335輸出。LMD18200T的最高工作電壓為55V,結合RDDV伺服閥的工作特性,選擇輸入28V直流電壓。接入電容進行濾波,再接入發(fā)光二極管來顯示工作狀態(tài)。
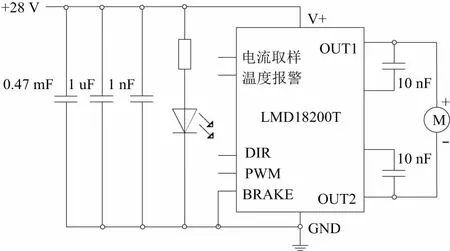
圖3 驅動電路原理圖
TMS320F28335DSP是TI公司推出的32位浮點數(shù)字控制處理器,外設豐富,封裝多樣,在電機控制、通信、醫(yī)療、航空航天等領域有廣泛的應用[5]。TMS320F28335DSP整合了Flash存儲器、快速的A/D轉換器、增強的CAN模塊、事件管理器、正交編碼電路接口及多通道緩沖串口等功能[6],具有強大的控制和信號處理能力,能夠完成復雜的控制算法[7]。考慮到RDDV閥的工作特性,本控制器將控制周期和采樣周期設置為100μs,產生的PWM信號頻率為10kHz。TMS320F28335的主頻高達150MHz,可以滿足要求。

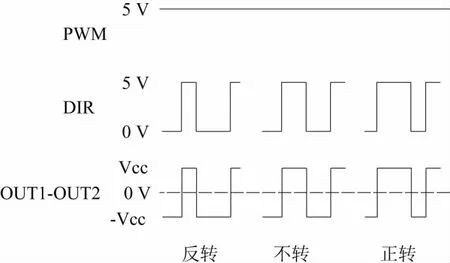
圖4 雙極性驅動方式的理想波形
F28335片內集成的ADC轉換模塊的核心資源是一個12位的模/數(shù)轉換器,由16個采樣通道復用兩個采樣保持器,模擬電壓輸入范圍為0~3V。若采樣輸入電壓范圍超出,可以采用電阻分壓,也可以考慮外擴。AD7606是一款8通道的A/D采樣芯片,通過配置相關的引腳可以選擇模擬電壓輸入范圍以及I/O的控制電平。AD7606的模擬電壓輸入范圍有兩種,分別是-5~+5V和-10V~+10V,由RANGE腳決定。VDRIVE腳是邏輯電平輸入腳,要求范圍是2.3V~5V,為配合F28335的3.3V的電平,VDRIVE腳接3.3V電壓。AD7606的轉換結果通過數(shù)據(jù)總線接到F28335的總線引腳,再配置片選信號和讀寫信號,就可以完成A/D采樣[3]。
4 控制器軟件設計
主程序軟件流程圖見圖5。初始化之后,與上位機通訊得到指令信號,采集得反饋信號,計算得到偏差,然后根據(jù)增量式PID算法得到控制量。這里LMD18200T采用雙極性驅動方式,在這種驅動方式下,PWM腳接高電平,電機的轉速和轉向由DIR腳決定,所以DIR腳波形占空比的增量即為控制量。之后LMD18200T驅動電機轉動,位置反饋傳感器傳送新的位置反饋信號,等下一個采樣時刻到了之后DSP讀取新的反饋信號,計算新的偏差和新的控制量來驅動電機,直到偏差符合要求。

圖5 軟件流程圖
5 試驗驗證
根據(jù)軟件流程,在CCS5.5環(huán)境中編寫DSP程序,再搭建相關電路并連接RDDV進行驗證。圖6是指令和反饋在不同大小關系情況下用示波器測得的LMD18200T管腳波形,其中1通道是LMD18200T的PWM腳對地的波形,2通道是LMD18200T的DIR腳對地的波形,最后一通道是LMD18200T的輸出端OUT1-OUT2的波形。經(jīng)過比較可以看出,針對指令和反饋的大小關系,控制器可以輸出不同占空比的波形來驅動RDDV閥,使閥內的有限轉角力矩電機能往不同的方向轉動,同時能有效控制液壓的方向和流量。
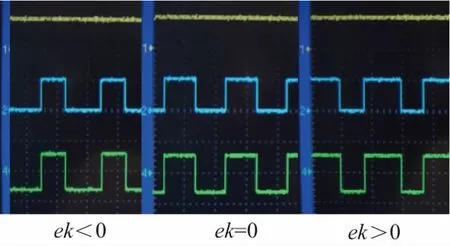
圖6 不同工作狀態(tài)下LMD18200T管腳波形
圖7是當指令從3V變化到6V時,反饋信號的變化曲線。從圖中可以看出,隨著指令的變化,反饋能跟隨指令進行變化。主要性能參數(shù):上升時間為6.8ms,調節(jié)時間為18ms,超調量為36.7%,穩(wěn)態(tài)誤差在0.1V以內。
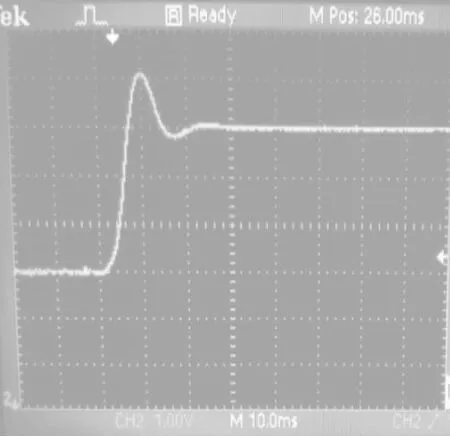
圖7 反饋隨指令的變化曲線
6 結語
本文將TMS320F28335應用到RDDV閥控制器當中,通過獲取指令和反饋的偏差,利用PID調節(jié)輸出PWM波給驅動芯片LMD18200T,進而控制電機的偏轉角度。試驗結果表明,LMD18200T能夠輸出理想占空比的PWM波驅動電機,閥的位置反饋也能跟隨指令的變化而變化。試驗過程中通過對RDDV閥液壓流量及方向的監(jiān)控結果表明,本文提出的對RDDV閥的數(shù)字化控制達到了設計的目標。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
