頂出托舉式缽苗脫盤裝置設(shè)計與試驗
2020-04-24 07:09:54馮世杰吳明亮
農(nóng)業(yè)工程學(xué)報 2020年5期
馮世杰,吳明亮,顏 波,全 偉
頂出托舉式缽苗脫盤裝置設(shè)計與試驗
馮世杰1,2,吳明亮1,3※,顏 波1,全 偉1
(1. 湖南農(nóng)業(yè)大學(xué)機電工程學(xué)院,長沙 410128; 2. 信陽農(nóng)林學(xué)院園藝學(xué)院,信陽 464000;3. 湖南省現(xiàn)代農(nóng)業(yè)裝備工程技術(shù)研究中心,長沙 410128)
針對現(xiàn)有自動取苗裝置作業(yè)過程中出現(xiàn)苗體受損、缽體開裂、基質(zhì)損失率高等問題,該研究設(shè)計了一種適應(yīng)活動苗盤的托舉式缽苗脫盤裝置。設(shè)計了具有縱向、橫向及豎直方向定位功能的苗盤三維定位機構(gòu)和具有苗盤開啟與缽苗托舉功能的開啟-托舉機構(gòu),并設(shè)計了脫盤裝置的PLC控制系統(tǒng)。為驗證缽苗脫盤裝置的作業(yè)效果,選取托舉速度、端面類型及基質(zhì)含水率為試驗因素,以缽苗在托舉臺端面上的位置合格率和脫盤過程中缽體基質(zhì)損失率為評價指標(biāo),以16穴活動苗盤模型培育的35 d苗齡油菜缽苗為對象,采用L9(34)正交表設(shè)計試驗方案進行臺架試驗。試驗結(jié)果表明,各因素對缽苗位置合格率和缽苗基質(zhì)損失率影響的主次順序依次為托舉臺端面類型、托舉速度、基質(zhì)含水率;試驗獲得影響因素的最優(yōu)組合為托舉速度32 mm/s、托舉臺端面為橡膠面、基質(zhì)含水率55%。基于優(yōu)選參數(shù)組合進行重復(fù)性驗證試驗,結(jié)果表明,缽苗脫盤后托舉臺端面上的位置合格率為100%,基質(zhì)損失率為1.56%,滿足實際作業(yè)需要。該研究可為缽苗自動移栽機取苗機構(gòu)的研發(fā)提供參考。
農(nóng)業(yè)機械;設(shè)計;苗盤;缽體;定位機構(gòu);托舉臺;脫盤裝置
0 引 言
缽苗移栽有利于作物田間管理,是大幅提高作物產(chǎn)量的有效手段之一[1-2]。歐美發(fā)達國家對移栽技術(shù)研究較早,已經(jīng)基本實現(xiàn)了缽苗移栽自動化,而中國缽苗移栽起步較晚技術(shù)落后,嚴重制約了大田作物移栽種植[3]。近年來隨著國內(nèi)現(xiàn)代化農(nóng)業(yè)的發(fā)展,對缽苗移栽的自動取苗裝置作業(yè)質(zhì)量和效率的要求進一步提高[4-5]。
缽苗脫盤是自動取苗過程中的關(guān)鍵環(huán)節(jié),脫盤時過高的基質(zhì)損失率將導(dǎo)致缽苗栽后緩苗期延長,脫盤時的苗體損傷也會導(dǎo)致缽苗移栽效益下降,同時缽苗脫盤效率也直接影響到自動取苗裝置的作業(yè)性能[6-8]。
為提高缽苗脫盤質(zhì)量及效率,相關(guān)學(xué)者根據(jù)缽體的力學(xué)特性和幼苗生長特點從不同角度對缽苗脫盤裝置進行了研究。Choi等[9]利用五桿滑道機構(gòu)實現(xiàn)缽苗脫盤,但其作業(yè)效率和成功率較低且缽苗根系損傷較大。尹大慶等[10]等針對根系發(fā)達、缽體小且含水率低的玉米缽苗移栽,設(shè)計了杠桿頂出式缽苗脫盤裝置,能有效提高作業(yè)效率。趙勻等[11]通過苗爪沿缽穴內(nèi)壁探入實現(xiàn)缽苗脫盤,提高了缽苗脫盤質(zhì)量,而作業(yè)效率和成功率有待提高。王蒙蒙等[12]利用曲柄擺桿機構(gòu)實現(xiàn)缽苗脫盤,缽苗基質(zhì)損失率較低但作業(yè)效率不高。俞高紅等[13-15]利用橢圓-不完全非圓齒輪行星系控制取苗爪的運行,通過夾取的方式使缽苗脫盤,有效提高作業(yè)效率。韓豹等[16]設(shè)計了插入式苗爪來實現(xiàn)缽苗脫盤,通過調(diào)節(jié)苗爪針間距來降低缽苗脫盤基質(zhì)損失率。韓綠化等[17]利用氣體噴射原理設(shè)計了穴盤苗底部氣吹式缽體松動裝置,實現(xiàn)缽體與缽穴壁之間非機械接觸式松脫,具有不傷苗的優(yōu)點。倪有亮等[18]利用PLC控制集排式頂苗機構(gòu)從底部將缽苗頂出實現(xiàn)缽苗脫盤,提高了缽苗脫盤效率。
縱觀現(xiàn)有研究發(fā)現(xiàn),缽苗脫盤裝置主要有夾莖取出式、夾缽取出式、頂出式[19-21],作業(yè)時末端執(zhí)行器對缽苗施加外力來克服缽體與缽穴間的切向粘附力、摩擦力及缽苗重力實現(xiàn)缽苗脫盤,但是,由于機械力直接作用于缽苗,導(dǎo)致缽苗脫盤過程中缽體開裂、變形,苗體傷殘,基質(zhì)損失率升高、取苗成功率降低。
針對上述問題,本文基于所研制的活動苗盤[22],設(shè)計了一種托舉式缽苗脫盤裝置,通過托舉缽苗脫盤的方式來取苗,以降低機械力對缽苗的直接損傷,提高缽苗脫盤質(zhì)量和脫盤效率,為自動移栽機新型取苗機構(gòu)的研發(fā)提供參考。
1 整機結(jié)構(gòu)與工作原理
托舉式缽苗脫盤裝置主要由輸送機構(gòu)、定位機構(gòu)、開啟-托舉機構(gòu)及控制系統(tǒng)等組成,如圖1所示。其中,輸送機構(gòu)由輸送輥、鏈輪、電機組成;定位機構(gòu)由定位板、導(dǎo)向定位輪、半Y形定位桿(分布在方形底板的4個角點)和傳感器等組成;開啟-托舉機構(gòu)主要由底板、短推板、長推板、托舉臺、電動缸組成;控制系統(tǒng)主要由PLC控制器、驅(qū)動器、電磁開關(guān)等組成。與機器配套所用活動苗盤由齒形板、矩形板、連接支撐軸、軸套及扭力彈簧組成,苗盤穴孔為倒四棱臺形狀[22],如圖2所示。
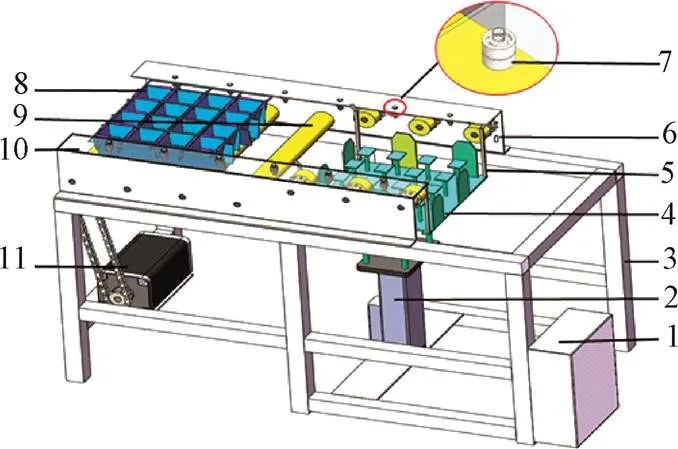
1.PLC控制箱 2.電動缸 3.機架 4.開啟-托舉機構(gòu) 5.半Y形定位桿 6.傳感器 7.導(dǎo)向定位輪 8.活動苗盤 9.輸送輥 10.定位板 11.電機
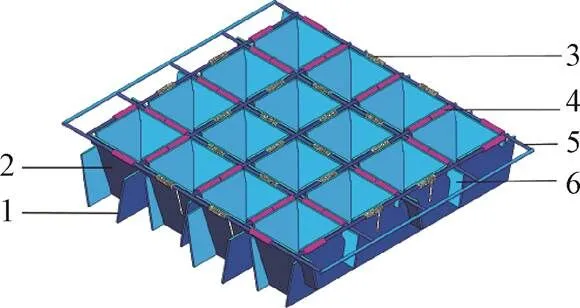
1.矩形板 2.齒形板 3.扭力彈簧 4.軸套 5.連接支撐軸 6.承載板
作業(yè)時,輸送輥在電機驅(qū)動下將苗盤向定位區(qū)域移送;傳感器檢測到苗盤后PLC控制器切斷電源,輸送輥停止轉(zhuǎn)動,苗盤在輸送輥摩擦力及導(dǎo)向定位輪作用下停在預(yù)定區(qū)域內(nèi);同時PLC控制電動缸推動底板上行,底板上半Y形定位桿觸碰到正上方活動苗盤的縱向連接支撐軸,對活動苗盤縱向位置進行校正,最終與定位板、導(dǎo)向限位輪一起完成苗盤定位;隨著底板繼續(xù)上行,開啟-托舉機構(gòu)上的短推板觸碰到活動苗盤矩形板,苗盤矩形板受到短推板的作用力克服扭力彈簧的扭力偶矩繞連接支撐軸外擺,直至矩形板垂直于苗盤的上端面;緊接著在長推板推動下,苗盤齒形板克服扭力彈簧的扭力偶矩繞連接支撐軸外擺,直至苗盤穴孔呈四棱柱狀,實現(xiàn)苗、盤分離,同時上行的托舉臺托住缽體并繼續(xù)上行,將缽苗舉升到超過活動苗盤上端水平面一定高度,完成缽苗脫盤。
脫盤后的缽苗呈4×4陣列布局,等待后續(xù)取苗作業(yè)中的缽苗托持爪沿陣列縱向間隙伸入,將陣列缽苗整體托持并移送至指定地方,完成取苗過程。
2 關(guān)鍵部件設(shè)計
2.1 苗盤定位機構(gòu)
2.1.1 苗盤定位機構(gòu)結(jié)構(gòu)設(shè)計
針對活動苗盤結(jié)構(gòu)特點,設(shè)計了由半Y形定位桿、導(dǎo)向定位輪和定位板構(gòu)成的三維定位機構(gòu),從縱向、橫向和豎直方向?qū)顒用绫P進行定位,確保開啟-托舉機構(gòu)能有效開啟苗盤。由于不同苗盤因慣性力差異在輸送機構(gòu)上產(chǎn)生縱向位置偏差,將縱向定位桿設(shè)計為上部向外傾斜下部直立的半Y形,確保定位桿對苗盤縱向位置差異具有一定的適應(yīng)性;設(shè)計2塊長方形定位板限制活動苗盤沿豎直方向上移動,定位板平行于機架垂直固結(jié)于機架兩側(cè)的輸送輥支架上,且2塊定位板間距大于長推板橫向間距小于苗盤橫向?qū)挾龋粚?dǎo)向定位輪沿縱向均勻安裝在定位板下端面,同時保證機架每側(cè)任意時刻都有2個導(dǎo)向定位輪對移動中的苗盤進行縱向引導(dǎo)和橫向限位,如圖3所示。
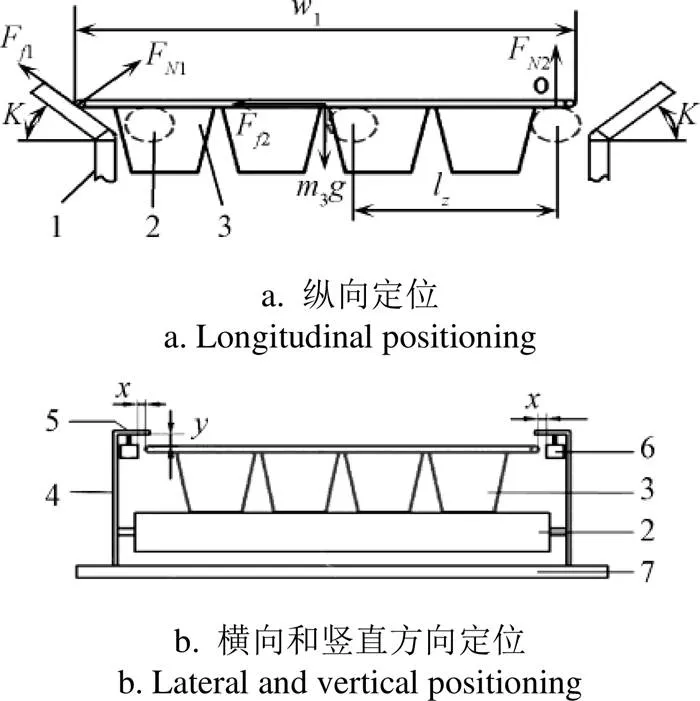
1.半Y形定位桿 2.輸送輥 3.活動苗盤 4.輸送輥支架 5.定位板 6.導(dǎo)向定位輪 7.機架
1.Half Y shaped positioning bar 2.Delivery roller 3.Movable tray 4.Support of delivery roller 5.Positioning plate 6.Guidancepositioningwheel 7.Frame
注:為半Y形定位桿折彎部分傾角,(°);3為苗盤質(zhì)量,kg;為重力加速度,m·s-2;F1為半Y形定位桿對苗盤的推力,N;F2為輸送輥對苗盤的支持力,N;F1為苗盤對半Y形定位桿的摩擦力,N;F2為苗盤對輸送輥的摩擦力,N;1為苗盤的縱向?qū)挾龋?83 mm;為導(dǎo)向定位輪與苗盤間距,mm;為定位板與苗盤頂端間距,mm。
Note:is dip angle of bend of half Y shaped positioning rod, (°);3is mass of tray, kg;is the acceleration of gravity, m·s-2;F1is thrust of half Y shaped positioning rod against movable tray, N;F2is supporting force of delivery roller against movable tray, N;F1is friction of movable tray against half Y shaped positioning rod, N;F2is friction of movable tray against delivery roller, N;1is longitudinal width of movable tray, which is 283 mm;is distance between guidancepositioningwheel and movable tray, mm;is distance between positioning plate and movable tray, mm.
圖3 活動苗盤三維定位機構(gòu)
Fig.3 3D positioning mechanism of movable tray
2.1.2 苗盤定位機構(gòu)參數(shù)確定
定位時,上行的半Y形定位桿傾斜部分先與具有縱向位置偏差的苗盤連接支撐軸接觸,將苗盤一側(cè)向上頂起。隨著定位桿上行,在重力的作用下苗盤連接支撐軸滑過定位桿傾斜部分進入由定位桿直立部分所構(gòu)成的矩形空間,完成苗盤的縱向定位,設(shè)計時取苗盤縱向?qū)挾茸鳛?個兩定位桿直立部分縱向間距。取一側(cè)被定位桿傾斜部分向上推起的活動苗盤為研究對象,進行受力分析,如圖3a所示。根據(jù)平面內(nèi)任意力系的平衡條件得苗盤滑動方程有:
(1)
式中ΣM為苗盤所受作用力對O點的合力矩,N;ΣF苗盤在水平方向上所受力合力,N;ΣF為苗盤在豎直方向上所受力合力,N;為苗盤的慣性力加速度,mm/s2;F為苗盤滑動回位慣性力,N;l為相鄰傳動輥的軸間距,取127 mm;連接支撐軸和半Y形定位桿間摩擦系數(shù)為0.3,苗盤和輸送輥間摩擦系數(shù)為0.36,所以F10.3F1,F20.363。
由式(1)可得=54°。因此苗盤在半Y形定位桿斜面上產(chǎn)生滑動的條件為>54°,為保證苗盤縱向定位的可靠性,本文取值=70°。
由于苗盤開啟時短推板推動矩形板,長推板推動齒形板的承載部位(如圖4),結(jié)合活動苗盤的結(jié)構(gòu)參數(shù),半Y形定位桿的高度為

式中H為半Y形定位桿的高度,mm;1為活動苗盤高度,72 mm;為短推板高度,mm;Δ為苗盤停止移動后與標(biāo)準(zhǔn)位置縱向上產(chǎn)生的差值,由于Δ·tan的值關(guān)系到脫盤裝置的作業(yè)效率,本設(shè)計中Δ取值為10 mm。
為了保證苗盤橫向定位精度并降低苗盤移動阻力,導(dǎo)向定位輪采用2個606深溝軸承軸向疊加而成,根據(jù)前期試驗,將導(dǎo)向定位輪外緣與苗盤間距設(shè)計為1.5 mm;為降低苗盤移動阻力并緩解苗盤開啟瞬間受到的沖擊力,定位板與苗盤上端面間距設(shè)計為5 mm。
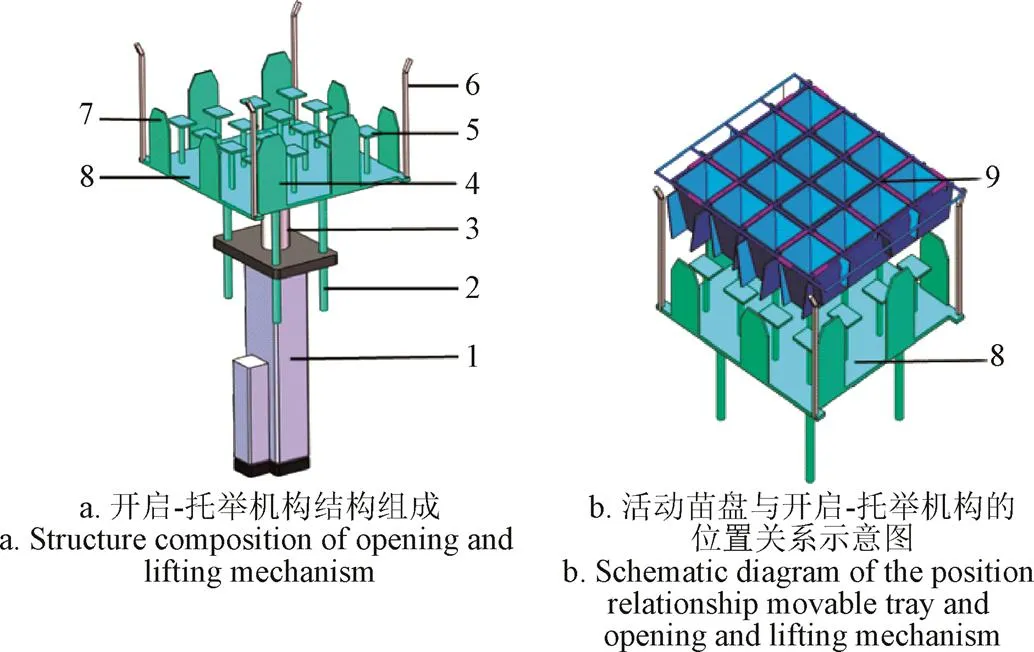
1.電動缸 2.導(dǎo)向桿 3.推桿 4.長推板 5.托舉臺 6.半Y形定位桿 7.短推板 8.底板 9.活動苗盤
2.2 開啟-托舉機構(gòu)
2.2.1啟-托舉機構(gòu)結(jié)構(gòu)設(shè)計
結(jié)合活動苗盤的矩形板、齒形板有序開啟的特點,設(shè)計了由短推板、長推板、托舉臺、底板、導(dǎo)向桿及電動缸等構(gòu)成的開啟-托舉機構(gòu)。長推板垂直固結(jié)于底板縱向兩側(cè),短推垂直固結(jié)于底板橫向兩側(cè);托舉臺在底板上呈陣列分布并與苗盤缽穴一一對應(yīng),如圖4所示。其中,定位機構(gòu)中的半Y形定位桿固結(jié)于底板的4個角點上。
作業(yè)時,托舉臺端面直接對缽體底部作用,托舉端面由于材料或結(jié)構(gòu)的不同與缽體接觸時對缽底產(chǎn)生的作用力不同,進而影響到托舉質(zhì)量和基質(zhì)損失率,本文將托舉端面設(shè)計為金屬面、金屬面+鋼針(鋼針垂直焊接在金屬面中心,直徑1 mm,高10 mm)、有點狀突起的橡膠面3種類型[12-23],然后通過試驗來優(yōu)選。
2.2.2 托舉臺參數(shù)確定
結(jié)合缽苗脫盤效率和后續(xù)托持爪移苗作業(yè)的需要,設(shè)計中以缽體高度的80%托出苗盤時托舉臺的位置為托舉臺上行最高點,底板與苗盤之間設(shè)有5 mm安全間距,如圖5所示。由此確定托舉臺的高度為

1.托舉到設(shè)計高度的缽苗 2.初始狀態(tài)的缽苗 3.活動苗盤
1.Pot seedling lifted to designed height 2.Initial pot seedling 3.Movable tray
注:0為缽體高度,mm;1為活動苗盤高度,mm;2為缽體被托出苗盤部分的高度,mm;H為托舉臺高度,mm;H為短推板高度,mm;H為長推板高度,mm;0為托舉結(jié)束時底板與苗盤間距,mm;1為托舉臺與短推板矩形部分高度差,mm;0為推板梯形部分高度,mm;1為短推板伸出苗盤頂端的高度,mm;為推板斜面傾角,(°);1為推板上邊長度,mm;2為推板下邊的長度,mm;3為托舉結(jié)束時短推板與苗盤頂端相交線長度,mm。
Note:0is height of pot body, mm;1is height of movable tray, mm;2is height of part of pot body is lifted out of movable tray, mm;His height of lifting platform, mm;His height of short push plate, mm;His height of long push plate, mm;0is distance between bottom plate and movable tray at the end of lifting; mm;1is vertical height difference between lifting platform and rectangular part of short push plate, mm;0is height of trapezoidal part of push plate, mm;1is height of short push plate beyond of top of movable tray, mm;is trapezoidal inclination of push plate, (°);1is length of top of push plate, mm;2is length of bottom of push plate, mm;3is length of intersection line between short push plate and top of movable tray at the end of the lifting, mm.
圖5 開啟-托舉機構(gòu)組件
Fig.5 Opening and lifting mechanism component
由于矩形板完全開啟齒形板未動時缽穴底部為60 mm×35 mm的長方形,為保證托舉臺順利通過缽穴下口托舉缽苗,結(jié)合定位機構(gòu)的間隙將托舉臺端面設(shè)計為40 mm×25 mm矩形。
2.2.3 苗盤開啟推板參數(shù)確定
苗盤開啟推板由梯形結(jié)構(gòu)和矩形結(jié)構(gòu)2部分構(gòu)成。長、短推板的梯形結(jié)構(gòu)尺寸相同,長推板的矩形結(jié)構(gòu)高于短推板(見圖5)。苗盤開啟時推板的2個斜面同時對苗盤作用,因此推板上邊長1小于缽穴下口徑,設(shè)計中取1=30 mm;推板底邊長2小于缽穴上口徑,設(shè)計中取2=55 mm;為了避免推板和側(cè)板之間產(chǎn)生自鎖,必須保證推板斜面傾角大于兩者間摩擦角,由于兩者間滑動摩擦系數(shù)為0.30,所以>=arctan0.30=17°。
設(shè)計中短推板將矩形板完全開啟的同時長推板與齒形板接觸,為提高脫盤缽苗缽體的質(zhì)量,設(shè)計中同時規(guī)定矩形板完全開啟后短推板繼續(xù)上行1(2 mm),此時開啟-托舉機構(gòu)中的托舉臺與缽苗底部接觸。即短推板的矩形結(jié)構(gòu)尺寸比托舉臺高1(圖5),各參數(shù)之間的關(guān)系為
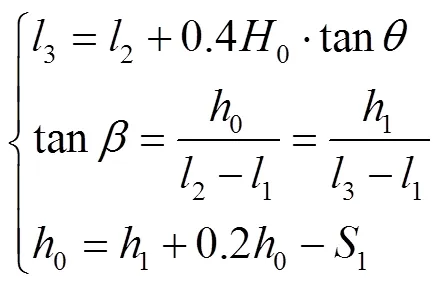
由式(4)得=48.37°。因此,推板斜面傾角取值范圍為17°<<48.37°。
為進一步確定值,將空盤時齒形板(齒形板和矩形板繞苗盤支撐軸擺動特性一致)視作輕質(zhì)桿,點與軸鉸接。取點作為研究動對象,對缽穴開啟過程進行運動學(xué)分析:點的絕對運動是以點為圓心、為半徑的圓周運動,絕對速度V的大小為Lω,方向垂直于輕質(zhì)桿軸線;點的相對運動為沿推板斜面的直線運動,相對速度V方向沿推板斜面向下;牽連運動為推板的勻速直線運動,牽連速度V的大小、方向與推板上行速度0一致。
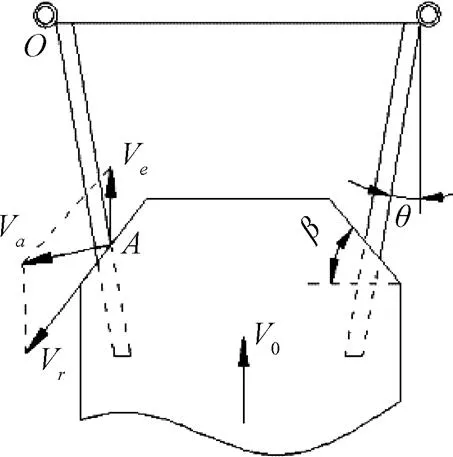
注:V0為推板向上運行速度,mm·s-1;Va為A點的絕對速度,mm·s-1;Vr為A點的相對速度,mm·s-1;Ve為A點的牽連速度mm·s-1;β為推板斜面傾角,(°);θ為苗盤錐角,(°)。
根據(jù)速度合成定理可得齒形板的開啟瞬時速度為
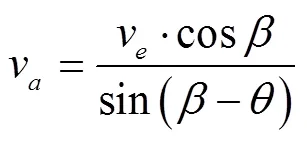
由式(5)可知,齒形板開啟的絕對速度V隨著值增大而減小。參考文獻[24],取=45°。
當(dāng)=45°時短推板的高度為

由式(6)、式(2)可得半Y形定位桿高H=180 mm。
由工作過程可知,矩形板完全開啟時長推板與齒形板接觸,此時長推板斜面與齒形板接觸點到苗盤底部的間距為4,如圖7所示,由此可得:
由式(7)得長推板的高度H=100.5 mm。
1.短推板 2.長推板 3.齒形板
1.Short push plate 2.Long push plate 3. Toothed plate
注:4為齒形板承載部位到苗盤底面間距,mm;5為齒形板承載部位與長推板梯形底邊的間距,mm;6為2個齒形板承載部位間距,mm;7為6與1差值的二分之一,mm;8為6與缽穴下口徑差值的二分之一,mm;9為6與1的間距,mm。
Note:4is distance between opening bearing part of toothed plate and bottom of movable tray, mm;5is distance between opening bearing part of toothed plate and trapezoidal bottom edge of long push plate, mm;6is distance of bearing parts of two toothed plate , mm;7is one-half of difference value between6and1, mm;8is one-half of difference value between6and diameter of lower mouth of pot hole, mm;9is distance between6and1, mm.
圖7 長推板與齒形板相互位置關(guān)系示意圖
Fig.7 Schematic diagram of mutual position relationship between long push plate and toothed plate
2.3 控制系統(tǒng)設(shè)計
針對托舉式缽苗脫盤裝置連續(xù)作業(yè)的特點,苗盤輸送機構(gòu)的驅(qū)動電機由步進驅(qū)動器根據(jù)PLC信號控制啟停,用于驅(qū)動半Y形定位桿和開啟-托舉機構(gòu)的電動缸由伺服驅(qū)動根據(jù)PLC信號控制,控制系統(tǒng)包括硬件和軟件2部分。硬件主要由PLC控制器、操作觸屏、紅外傳感器、步進電機、伺服電機、驅(qū)動器、電磁開關(guān)等組成,如圖8a所示(虛線部分為后續(xù)作業(yè)中托持爪的驅(qū)動部分)。
根據(jù)缽苗脫盤裝置中電機數(shù)量結(jié)合后續(xù)托持爪的作業(yè)需要,選用三菱FX3U 40MT型6軸PLC控制器,該控制器有24個輸入接口和16個輸出接口,內(nèi)存容量8 000 k,具有主、從通訊和在線監(jiān)視功能。其他硬件包括:步科觸屏,型號ET100;OMDHON常開型紅外傳感器,型號E3JK-DS30M1,響應(yīng)頻率5 Hz;杰美康步進電機,型號57J1880EC-1000,驅(qū)動器型號2HSS57;伺服電機與伺服驅(qū)動器為臺達公司生產(chǎn),伺服電機型號ECMA-C20604SS,轉(zhuǎn)速3 000 r/min,伺服驅(qū)動器型號ASD-B2-0421-B;電動缸為深圳市宇創(chuàng)機電設(shè)備公司生產(chǎn),型號EDA60,行程 250 mm,推力1.36 kN,速度0~250 mm/s,絲桿導(dǎo)程5 mm;U型限位開關(guān),型號PM-T45,響應(yīng)頻率1 Hz。
采用三菱梯形圖編程軟件根據(jù)缽苗脫盤裝置各機構(gòu)作業(yè)時的動作及順序編寫控制系統(tǒng)程序,實現(xiàn)對脫盤裝置作業(yè)過程的控制,如圖8b所示。試驗時,通過觸屏將電動缸運行參數(shù)(0~250 mm/s)輸入軟件系統(tǒng),在PLC控制下伺服電機驅(qū)動電動缸運行,完成缽苗脫盤作業(yè)。
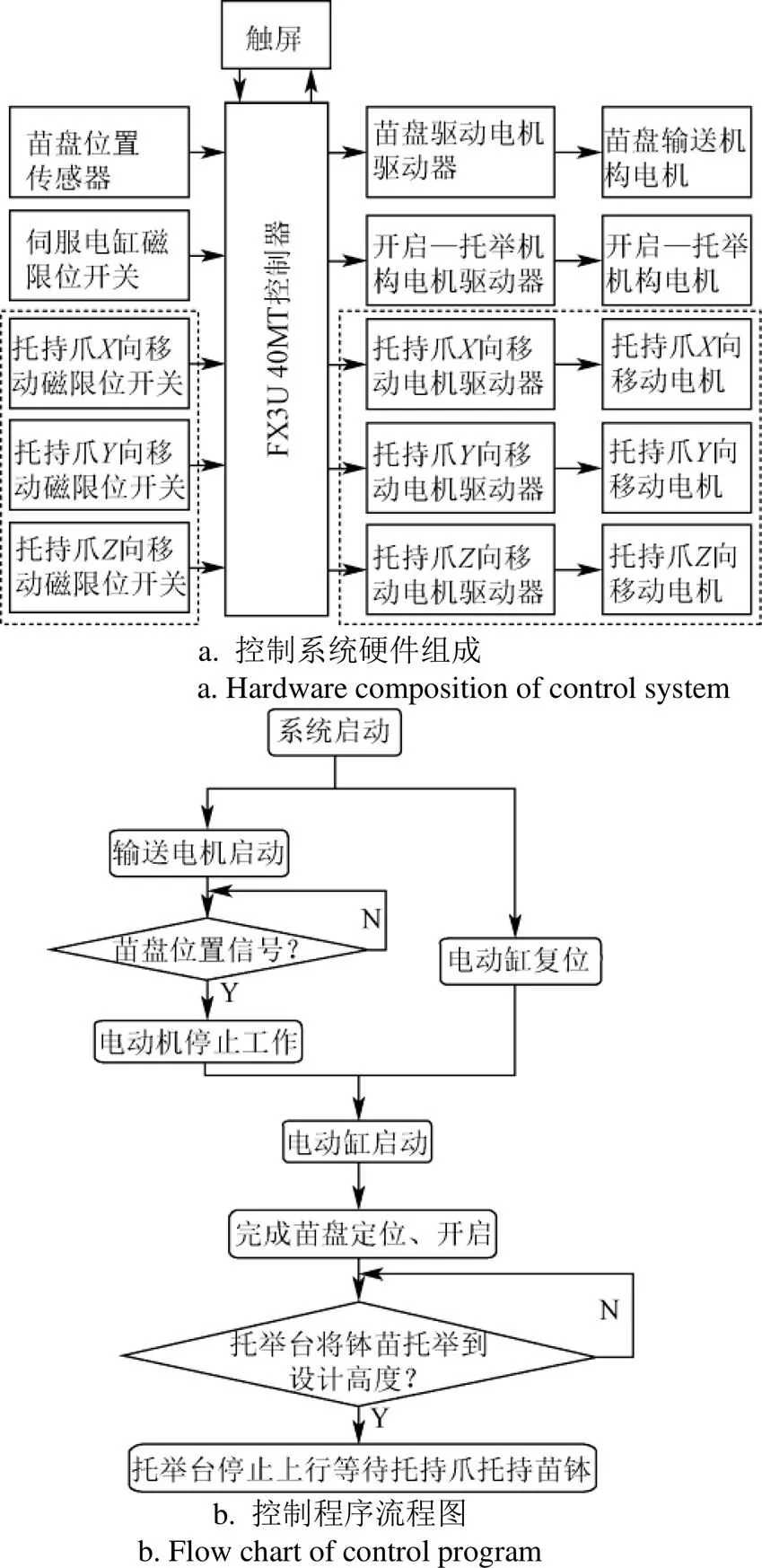
圖8 PLC控制系統(tǒng)
3 缽苗脫盤試驗與結(jié)果分析
3.1 試驗材料
試驗于2019年3月在湖南農(nóng)業(yè)大學(xué)農(nóng)業(yè)機械化工程實訓(xùn)中心進行。選用穴數(shù)為16(4×4布局)的活動苗盤進行育苗,苗盤橫向長為346 mm、縱向長度為283 mm、高為72 mm,苗盤缽穴規(guī)格為下邊長35 mm、上邊長55 mm、高55 mm,缽苗品種為湘雜油420,苗齡35 d。缽體基質(zhì)由泥炭、蛭石、珍珠巖、壤土(取自湖南農(nóng)業(yè)大學(xué)科研基地耘園)按4:2:2:1體積比配制,壓實度為1.1。試驗材料及裝置如圖9所示。
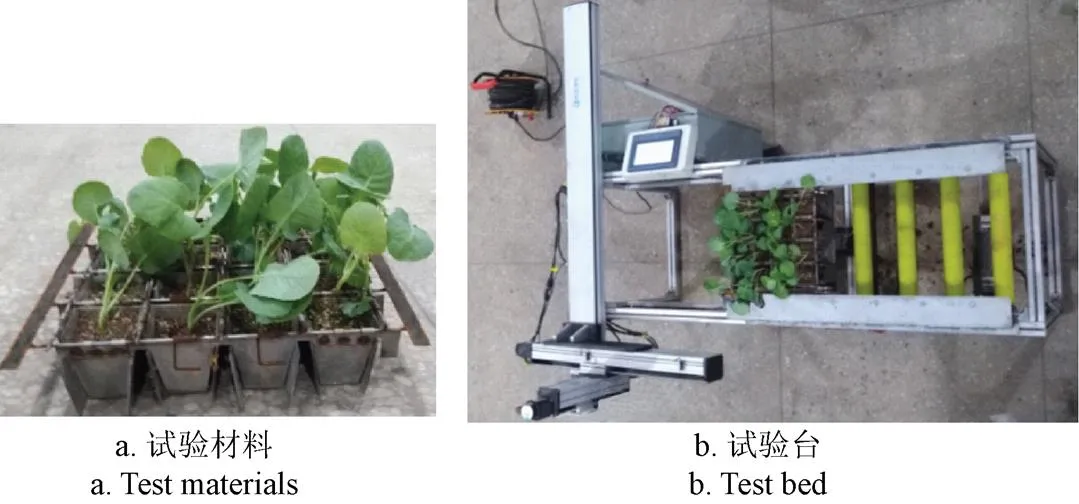
圖9 缽苗脫盤試驗
3.2 試驗評價指標(biāo)
缽苗脫盤后,取苗裝置的托持苗爪沿缽苗陣列縱向間隙伸入,對缽苗進行托持移送。如果缽苗在托舉臺上的位置偏差過大,托持苗爪在沿缽苗陣列間隙伸入時將導(dǎo)致缽體破損、開裂或缽苗移送失敗;缽苗脫盤過程中基質(zhì)損失率影響脫盤后缽苗質(zhì)量及移栽質(zhì)量。因此以缽苗在托舉臺上的位置合格率和基質(zhì)損失率作為評價指標(biāo),以缽體在托舉臺上的橫向位置偏移率來表征缽苗的位置合格率。
托舉結(jié)束后,在苗盤頂端平面內(nèi)用游標(biāo)卡尺測量缽體與矩形板的距離L;根據(jù)設(shè)計參數(shù)計算處于托舉端面中心位置的缽體在苗盤頂端平面內(nèi)與矩形板的距離L,如圖10所示。
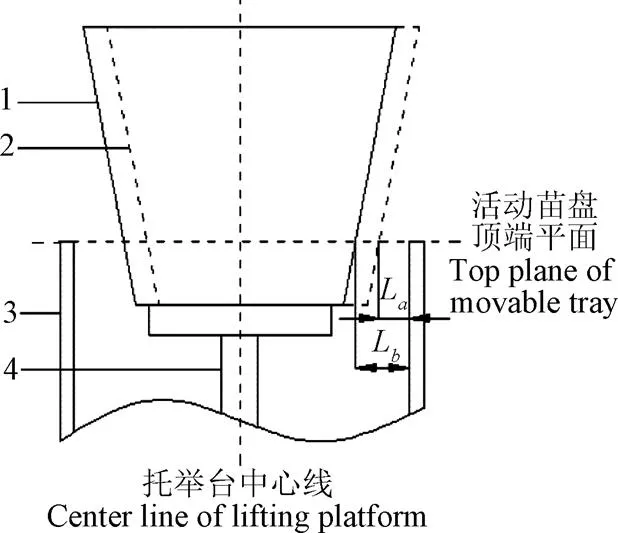
1.位置零偏移的缽體 2.位置偏移的缽體 3.苗盤側(cè)板 4.托舉臺
1.Pot body without position offset 2.Pot body with position offset 3.Side plate of movable tray 4.Lifting platform
注:L為發(fā)生偏移的缽體在活動苗盤頂端平面內(nèi)與缽穴壁的間距,mm;L為位置零偏移的缽體在活動苗盤頂端平面內(nèi)與缽穴壁的間距,mm。
Note: Lis distance between pot body with position offset and pot hole wall in plane of top of movable tray, mm;Lis distance between pot body without positional offset and pot hole wall in plane of top of movable tray, mm.
圖10 缽苗位置示意圖
Fig.10 Schematic diagram of pot seedling position
根據(jù)苗盤結(jié)構(gòu)參數(shù)、缽苗托舉高度及后續(xù)作業(yè)中托持苗爪的結(jié)構(gòu),取缽體在托舉端面橫向最大偏移量為5 mm。托舉結(jié)束后缽體在托舉端面上的位置偏移量應(yīng)滿足:
缽體基質(zhì)損失率計算公式為
式中為缽體基質(zhì)損失率,%;m為每盤缽苗脫盤基質(zhì)損失質(zhì)量,kg;m為每盤缽苗脫盤后基質(zhì)質(zhì)量,kg。
試驗時將長800 mm、寬500 mm、高30 mm的金屬盤放在脫盤裝置作業(yè)區(qū)下方,收集試驗中散落的基質(zhì)。每次試驗結(jié)束后用毛刷將底板上、托舉臺上、機架上及苗盤上的基質(zhì)清掃到金屬盤內(nèi),用電子天平(JJ200型,精度0.01 g)對金屬盤內(nèi)基質(zhì)進行稱量,計為該次試驗中的缽體基質(zhì)損失質(zhì)量m;每次試驗后沿缽體上端面將幼苗剪去稱質(zhì)量(忽略幼苗根系對缽體質(zhì)量的影響),計為該次試驗中的剩余基質(zhì)質(zhì)量m。
3.3 試驗因素及方案
由文獻[24-25]可知,活動苗盤脫苗過程中基質(zhì)損失率與基質(zhì)含水率及開啟部件上行速度有關(guān);根據(jù)動量守恒定律可知,隨著上行速度的增加托舉臺對缽體的作用力逐漸增大,缽體會出現(xiàn)開裂、變形及完整性降低等情況;由于作業(yè)時托舉臺端面直接作用于缽體底部,托舉端面由于材料或結(jié)構(gòu)的不同與缽體接觸時對缽底產(chǎn)生的作用力不同,進而影響托舉質(zhì)量和基質(zhì)損失率,因此選取基質(zhì)含水率、托舉端面類型、托舉臺托舉速度作為試驗因素。
根據(jù)文獻[26]可知,在油菜苗期,當(dāng)土壤水分含量低于50%時,油菜凈光合速率與對照相比開始下降。試驗中取50%、55%、60%作為含水率的3個水平值,試驗前對缽苗均勻澆水,用賽多利斯公司MA150型水分快速測定儀測定缽體含水率,含水率在水平值±1%范圍內(nèi)開始試驗。
采用2.2.1節(jié)中所設(shè)計的3種類型端面進行試驗,分析不同類型托舉端面對缽苗位置合格率和基質(zhì)損失率的影響。
托舉臺速度關(guān)系到缽苗脫盤后的缽體形變、基質(zhì)損失率及脫盤裝置的作業(yè)效率,為獲取托舉速度取值范圍,進行單因素試驗研究托舉速度對脫盤缽苗穩(wěn)定性及基質(zhì)損失的影響。考慮到實際作業(yè)效率需要,試驗中基質(zhì)含水率為55%,托舉臺初次運行速度取20 mm/s,隨后每次增加2 mm/s。試驗發(fā)現(xiàn),托舉速度為38 mm/s時缽體底部開始出現(xiàn)開裂、形變現(xiàn)象,并且隨著速度的增加缽體開裂、變形更加嚴重,基質(zhì)損失率明顯提高;托舉速度達到42 mm/s后,脫苗過程中苗盤上端面出現(xiàn)明顯的向上突起現(xiàn)象,并隨著速度的增加該現(xiàn)象愈加嚴重。為保證缽苗的穩(wěn)定托舉及苗盤使用壽命,結(jié)合半Y形定位桿高度、苗盤的高度及脫盤裝置的預(yù)期作業(yè)效率,試驗中托舉臺托舉速度取28、32和36 mm/s 共3個水平。
綜合以上分析,對缽苗脫盤試驗因素水平編碼,如表1所示。采用L9(34)正交表設(shè)計試驗方案,共有9組試驗,試驗方案和結(jié)果如表2所示。
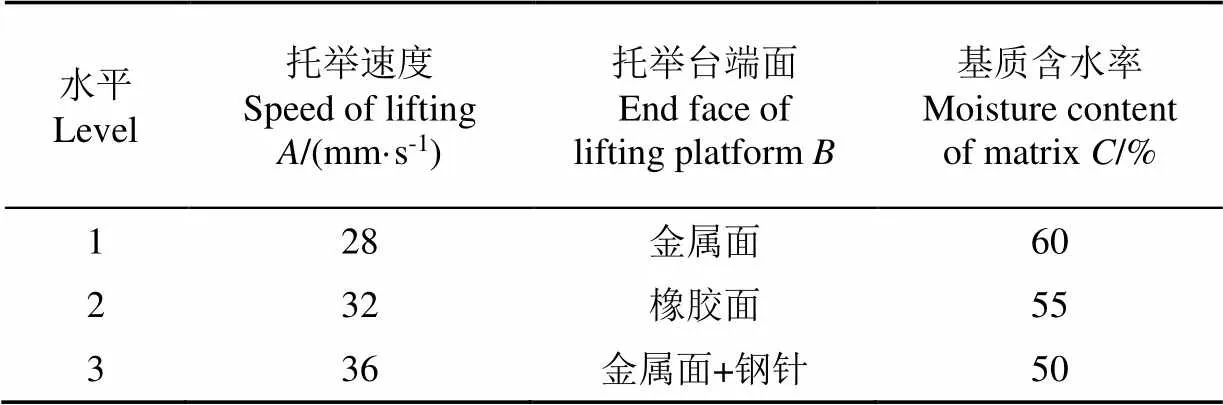
表1 正交試驗因素與水平
3.4 試驗結(jié)果與分析
試驗結(jié)束后在苗盤上端面內(nèi)測量缽體與矩形板的距離,以處于托舉臺中心位置的缽體在苗盤上端面內(nèi)與矩形板的距離為標(biāo)準(zhǔn),根據(jù)式(8)判斷單個缽體位置是否合格,進而計算整盤缽體位置合格率;根據(jù)式(9)測算每次試驗中的基質(zhì)損失率。為降低誤差每組試驗重復(fù)3次,取均值作為試驗結(jié)果記入表2。
用 SPSS 20.0 軟件對試驗數(shù)據(jù)做方差分析,如表3所示。
由表2可知,影響缽苗位置合格率和基質(zhì)損失率的因素主次順序均為;試驗中缽苗位置合格率的最優(yōu)組合為222,基質(zhì)損失率的最優(yōu)組合為131。
同時由表2可知,試驗中基質(zhì)損失率在1.35%~1.98%之間,平均值為1.62%,由于基質(zhì)損失率較低,不影響缽苗的移栽質(zhì)量[6-7],因此本試驗中以缽苗位置合格率來確定最優(yōu)參數(shù)組合,即最優(yōu)參數(shù)組合為222。
缽苗位置合格率隨著托舉端面類型的改變而不同,分析其原因主要為:金屬端面的托舉臺與缽底間摩擦力較小,托舉過程中缽體受金屬面的沖擊力的作用在金屬面上產(chǎn)生滑移,缽苗位置合格率低;橡膠面在與缽體接觸瞬間降低托舉臺對缽體的沖擊力,同時橡膠面的表層有點狀突起,增大了其與缽體底部的摩擦力,提高了缽苗位置合格率;金屬面+鋼針?biāo)鶚?gòu)成的托舉面受鋼針幾何參數(shù)和缽苗重心偏移(苗齡長,油菜莖葉偏斜引起)的影響,部分鋼針未能完全刺入缽體導(dǎo)致缽苗傾倒,位置合格率低于橡膠面。
基質(zhì)損失率隨托舉端面類型改變而改變,分析其原因為:當(dāng)托舉臺以一定速度與缽體底部接觸時,缽體受到托舉臺的沖擊而產(chǎn)生振動破壞缽體基質(zhì)之間的粘聚力使基質(zhì)損失增加,因此隨著托舉速度的增加基質(zhì)損失也逐漸增加;同等條件下,由于橡膠具有一定的彈塑性,當(dāng)橡膠端面的托舉臺與缽體接觸時,能緩解托舉臺對缽體的沖擊而降低基質(zhì)損失低;當(dāng)托舉端面為金屬面+鋼針時,在金屬面與缽體底部接觸之前有一個鋼針刺入缽體的過程,使缽體與端面接觸時的相對速度降低,有效降低基質(zhì)損失率。
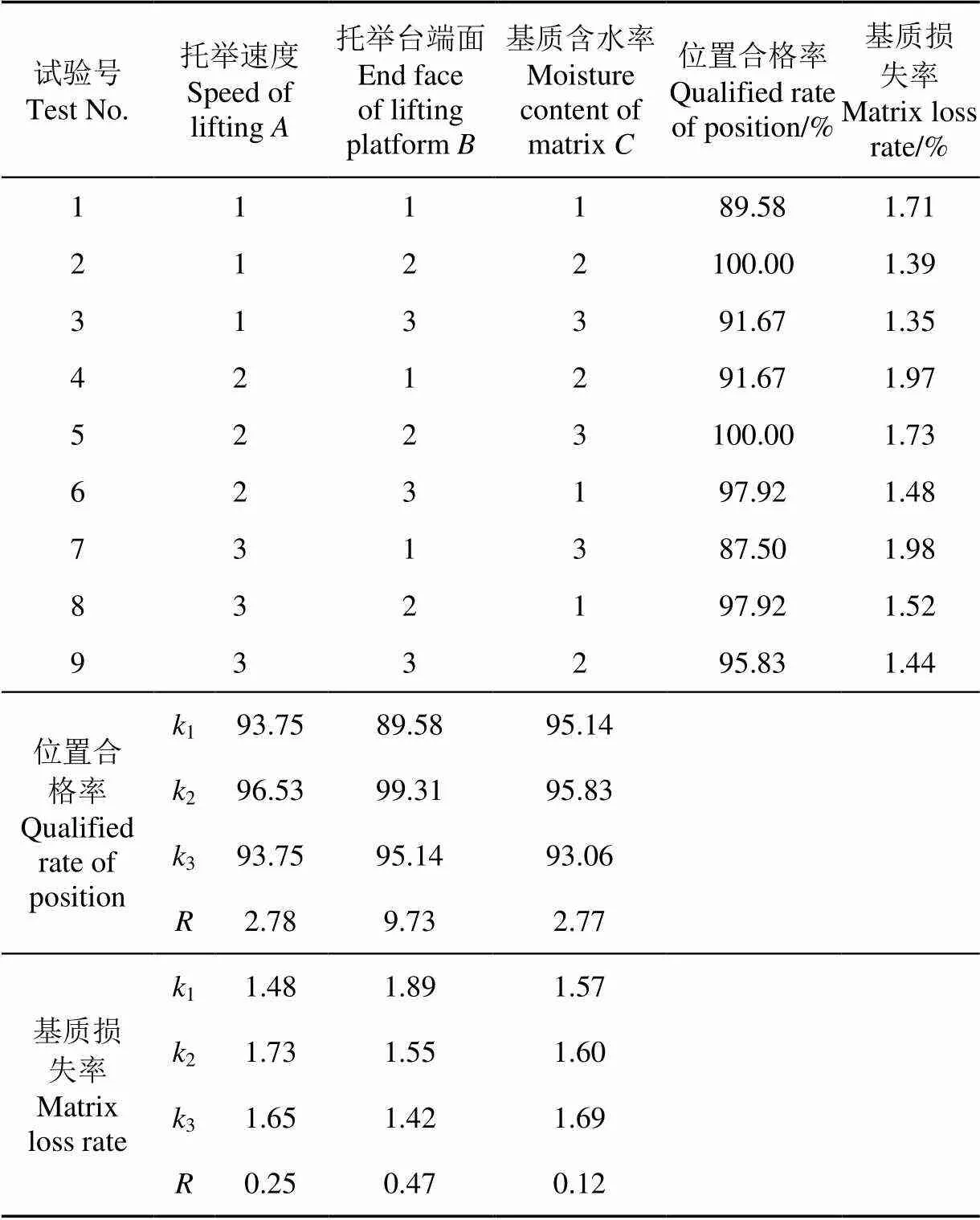
表2 正交試驗方案與結(jié)果
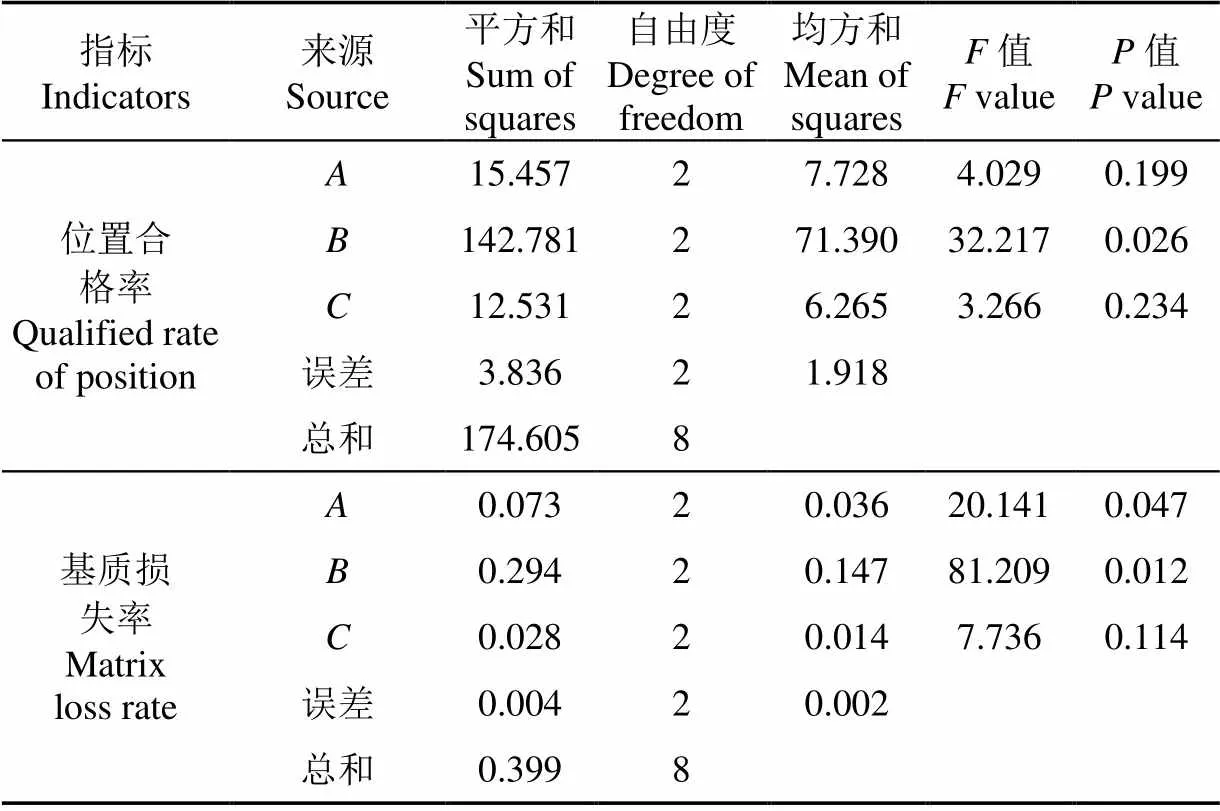
表3 各指標(biāo)方差分析
由表3可知,缽苗位置合格率方差分析中因素的>0.05(2,2)=19,<0.05,表明托舉端面類型對缽苗位置合格率影響顯著;基質(zhì)損失率方差分析中因素與因素的>0.05(2,2)=19,<0.05,表明托舉速度和托舉端面類型對基質(zhì)損失率影響顯著;試驗中基質(zhì)含水率對缽苗位置合格率和基質(zhì)損失影響均為不顯著。
由上述分析可知,試驗中最優(yōu)參數(shù)組合為222,托舉端面對缽苗位置合格率和基質(zhì)損失率的影響均顯著,托舉速度對質(zhì)損失率的影響顯著。
4 驗證試驗
為驗證優(yōu)化參數(shù)組合的作業(yè)效果,利用最優(yōu)參數(shù)組合進行重復(fù)性驗證試驗。試驗采用與缽苗脫盤試驗相同缽苗,試驗中托舉速度為32 mm/s,托舉臺端面為橡膠面,缽苗基質(zhì)含水率為55%。試驗方法同前,為降低試驗誤差,試驗重復(fù)3次,試驗結(jié)果如表4所示。由表4可知,最優(yōu)參數(shù)組合下的缽苗位置合格率為100%,平均基質(zhì)損失率為1.56%,缽苗脫盤過程中基質(zhì)損失主要集中在缽體的4個棱和上下邊沿,主要原因為缽體邊沿部位苗根較少,基質(zhì)間粘聚力小。
表4 優(yōu)選參數(shù)組合重復(fù)性試驗結(jié)果
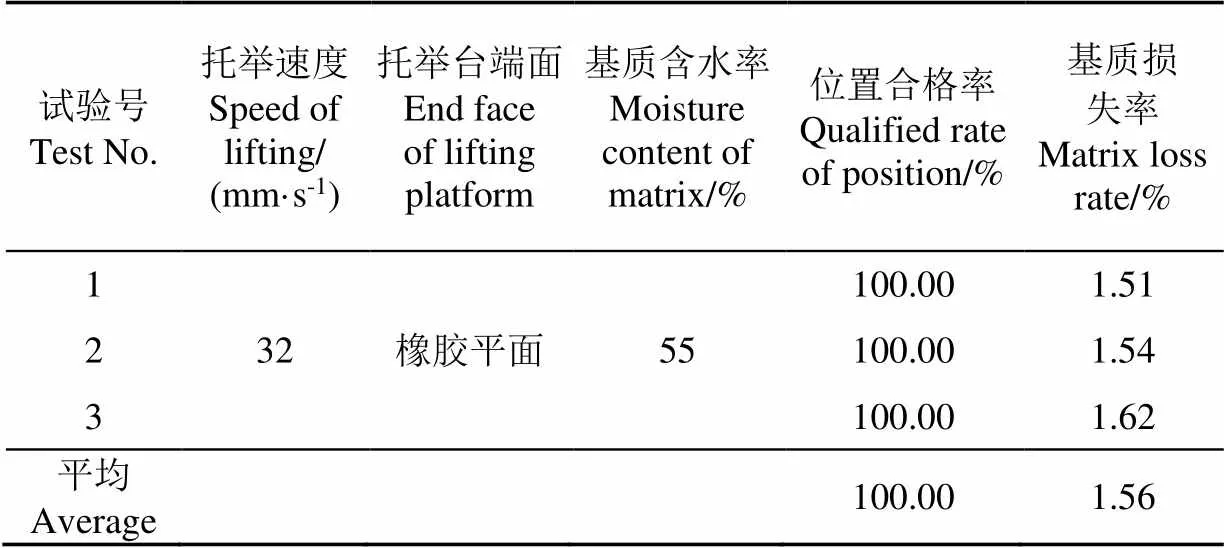
Table 4 Experiment results of replicate test in combination scheme with optimal factors
5 結(jié) 論
1)針對活動苗盤的結(jié)構(gòu)特點設(shè)計托舉式缽苗脫盤裝置,該裝置主要由輸送機構(gòu)、定位機構(gòu)、開啟-托舉機構(gòu)及PLC控制系統(tǒng)組成,結(jié)構(gòu)簡單、缽苗脫盤后位置合格率高、基質(zhì)損失率低。
2)選取缽苗位置合格率和基質(zhì)損失率為試驗指標(biāo),以托舉速度、托舉端面類型和基質(zhì)含水率為試驗因素,進行正交試驗,獲取各因素對缽苗位置合格率和缽苗基質(zhì)損失率影響主次順序為托舉臺端面類型、托舉速度、基質(zhì)含水率;獲取優(yōu)選參數(shù)組合為:托舉速度32 mm/s、托舉臺端面為橡膠面、基質(zhì)含水率55%,并基于優(yōu)選參數(shù)驗證試驗,結(jié)果表明,缽苗脫盤后的位置合格率為100%,平均基質(zhì)損失率為1.56%。
該缽苗脫盤裝置在優(yōu)選參數(shù)組合下的作業(yè)效果滿足實際生產(chǎn)需要,下一步將把缽苗的托持、移送作為研究方向,實現(xiàn)托舉式缽苗脫盤裝置與栽植機構(gòu)銜接。
[1] 于曉旭,趙勻,陳寶成,等. 移栽機械發(fā)展現(xiàn)狀與展望[J]. 農(nóng)業(yè)機械學(xué)報,2014,45(8):44-53.
Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Development and prospect of transplanting machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese with English abstract)
[2] 楊傳華,方憲法,楊學(xué)軍,等. 基于PLC的蔬菜缽苗移栽機自動輸送裝置[J]. 農(nóng)業(yè)機械學(xué)報,2013,44(S1):19-23,18.
Yang Chuanhua, Fang Xianfa, Yang Xuejun, et al. Automatic delivery mechanism of potted-seedling for vegetable transplanter based on PLC[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S1): 19-23, 18. (in Chinese with English abstract)
[3] 廖慶喜,張照,胡喬磊,等. 油菜紙缽苗移栽機氣動取苗機構(gòu)設(shè)計與軌跡分析[J]. 農(nóng)業(yè)機械學(xué)報,2017,48(11):70-78.
Liao Qingxi, Zhang Zhao, Hu Qiaolei, et al. Design and trajectory analysis of pneumatic picking-up mechanism for rape paper pot seedling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 70-78. (in Chinese with English abstract)
[4] 杜新武,李燦,李明勇,等. 旱作移栽缽苗自動取投苗技術(shù)研究進展[J]. 農(nóng)機化研究,2018,40(8):263-268.
Du Xinwu, Li Can, Li Mingyong, et al. Research progress of automatic extracting and launching seedlings techniques in dry land transplanting[J]. Journal of Agricultural Mechanization Research, 2018, 40(8): 263-268. (in Chinese with English abstract)
[5] 韓長杰,張學(xué)軍,楊宛章,等. 旱地缽苗自動移栽技術(shù)現(xiàn)狀與分析[J]. 農(nóng)機化研究,2011,33(11):238-240.
Han Changjie, Zhang Xuejun, Yang Wanzhang, et al. Present status and analysis of dry-land auto-transplanting seedling technique[J]. Journal of Agricultural Mechanization Research, 2011, 33(11): 238-240. (in Chinese with English abstract)
[6] 何亞凱. 蔬菜穴盤苗高速栽植自動取苗系統(tǒng)設(shè)計與研究[D]. 北京:中國農(nóng)業(yè)機械化科學(xué)研究院,2018.
He Yakai. Design and Research on Automatic Pick-up System for Vegetable Plug Seedling Transplant in High Speed[D]. Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2018. (in Chinese with English abstract)
[7] 王躍勇,于海業(yè). 穴盤幼苗機械手取苗基質(zhì)完整率影響因素試驗與分析[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(14):65-71.
Wang Yueyong, Yu Haiye. Experiment and analysis of impact factors for soil matrix intact rate of manipulator for picking-up plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 65-71. (in Chinese with English abstract)
[8] 袁挺,王棟,文永雙,等蔬菜移栽機氣吹振動復(fù)合式取苗機構(gòu)設(shè)計與試驗[J].農(nóng)業(yè)機械學(xué)報,2019,50(10):80-87.
Yuan Ting, Wang Dong, Wen Yongshuang, et al. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 80-87. (in Chinese with English abstract)
[9] Choi W C, Kim D C, Ryu I K, et al. Development of seedling pick-up device for vegetable transplants[J]. Transactions of the ASAE, 2001, 45(1): 13-19.
[10] 尹大慶,張爍,辛亮,等. 玉米缽苗頂出式有序分秧機構(gòu)的設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2018,34(9):68-74.
Yin Daqing, Zhang Shuo, Xin Liang, et al. Design and test of mechanism of push-out separating seedling for maize pot seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(9): 68-74. (in Chinese with English abstract)
[11] 趙勻,張衛(wèi)星,辛亮,等. 探入式番茄缽苗移栽機構(gòu)設(shè)計與試驗[J]. 農(nóng)業(yè)機械學(xué)報,2019,50(1):105-112.
Zhao Yun, Zhao Weixing, XinLiang, et al. Design and experiment of extensible potted tomatoes seedling transplanting mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 105-112. (in Chinese with English abstract)
[12] 王蒙蒙,宋建農(nóng),劉彩玲,等. 蔬菜移栽機曲柄擺桿式夾苗機構(gòu)的設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(14):49-57.
Wang Mengmeng, Song Jiannong, Liu Cailing, et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 49-57. (in Chinese with English abstract)
[13] 俞高紅,陳志威,趙勻,等. 橢圓-不完全非圓齒輪行星系蔬菜缽苗取苗機構(gòu)的研究[J]. 機械工程學(xué)報,2012,48(13):32-39.
Yu Gaohong, Chen Zhiwei, Zhao Yun, et al. Study on vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear[J]. Journal of Mechanical Engineering, 2012, 48(13): 32-39. (in Chinese with English abstract)
[14] 葉秉良,李麗,俞高紅,等. 蔬菜缽苗移栽機取苗臂凸輪機構(gòu)的設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2014,30(8):21-29.
Ye Bingliang, Li Li, Yu Gaohong, et al. Design and test on cam mechanism of seedling pick-up arm for vegetable transplanter for pot seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 21-29. (in Chinese with English abstract)
[15] 童俊華,俞高紅,朱贏鵬,等. 三臂回轉(zhuǎn)式蔬菜缽苗取苗機構(gòu)設(shè)計與試驗[J]. 農(nóng)業(yè)機械學(xué)報,2019,50(1):113-121.
Tong Junhua, Yu Gaohong, Zhu Yingpeng, et al. Design and experiment of three-arms rotary vegetable plug seedling pick-up mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 113-121. (in Chinese with English abstract)
[16] 韓豹,申大帥,郭暢,等.可調(diào)節(jié)式甘藍缽苗取苗末端執(zhí)行器設(shè)計與試驗[J]. 農(nóng)業(yè)機械學(xué)報,2019,50(11):111-120.
Han Bao, Shen Dashuai, Guo Chang, et al. Design and experiment of adjustable end-effector of cabbage seedings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(11): 111-120. (in Chinese with English abstract)
[17] 韓綠化,毛罕平,趙慧敏,等. 蔬菜穴盤育苗底部氣吹式缽體松脫裝置設(shè)計[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(4):37-45.
Han Lühua, Mao Hanping, Zhao Huimin, et al. Design of root lump loosening mechanism using air jets to eject vegetable plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 37-45. (in Chinese with English abstract)
[18] 倪有亮,金誠謙,劉基. 全自動移栽機取送苗系統(tǒng)的設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(23):10-19.
Ni Youliang, Jin Chengqian, Liu Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 10-19. (in Chinese with English abstract)
[19] 廖小花,毛罕平,韓綠化,等. 黃瓜穴盤苗拉拔力及缽體抗壓性能影響因素[J].農(nóng)業(yè)機械學(xué)報,2013,44(S1):27-32.
Miao Xiaohua, Mao Hanping, Han Lühua, et al. Analysis of influencing factors on force of picking plug seedlings and pressure resistance of plug seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S1): 27-32. (in Chinese with English abstract)
[20] 高國華,馮天翔,李福. 斜入式穴盤苗移栽手工作參數(shù)優(yōu)化及試驗驗證[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(24):16-22.
Gao Guohua, Feng Tianxiang, Li Fu. Working parameters optimization and experimental verification of inclined- inserting transplanting manipulator for plug seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(24): 16-22. (in Chinese with English abstract)
[21] 金鑫,杜新武,楊傳華,等. 蔬菜移栽穴盤苗自動輸送裝置設(shè)計與試驗[J]. 農(nóng)業(yè)機械學(xué)報,2016,47(7):103-111.
Jin Xin, Du Xinwu, Yang Chuanhua, et al. Design and experiment on automatic transporting mechanism for vegetable potted seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 103-111. (in Chinese with English abstract)
[22] 吳明亮,顏波,馮世杰,等. 缽體苗育苗活動苗盤結(jié)構(gòu)設(shè)計[J]. 湖南農(nóng)業(yè)大學(xué)學(xué)報,2018,44(6):666-671.
Wu Mingliang, Yan Bo, Feng Shijie, et al. Design and experiment of open type tray holes movable tray[J]. Journal of Hunan Agricultural University, 2018, 44(6): 666-671. (in Chinese with English abstract)
[23] 高國華,王凱,孫曉娜. 嫁接機鋼針頂起穴盤苗過程EDEM 模擬驗證及參數(shù)優(yōu)化[J]. 農(nóng)業(yè)工程學(xué)報,2017,33(21):29-35.
Gao Guohua, Wang Kai, Sun Xiaona. Verification for EDEM simulation of process of jacking tray-seedling by steel needle in grafting machine and parameter optimization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 29-35. (in Chinese with English abstract)
[24] 馮世杰,顏波,全偉,等. 活動苗盤脫苗力學(xué)分析及粘附力影響因素試驗研究[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(12):21-28.
Feng Shijie, Yan Bo, Quan Wei, et al. Mechanical analysis of seedling detaching from movable tray and influence factors of adhesion[J]. Transactions of the Chinese Society of Agricultural Engineering ( Transactions of the CSAE), 2019, 35(12): 21-28. (in Chinese with English abstract)
[25] Yang Y, Ting K C, Giacomelli G A. Factors affecting performance of sliding-needles gripper during robotic transplanting of seedings[J]. Transactions of the ASAE, 1991, 7(4): 493-498.
[26] 辛佳佳. 不同生育時期干旱脅迫對油菜生長生理及產(chǎn)量的影響研究[D]. 武漢:華中農(nóng)業(yè)大學(xué),2013.
Xin Jiajia. Effect of Drought Stress at Different Growth Stages on Growth Physiology and Yield of Rapeseed[D]. Wuhan: Huazhong Agricultural University, 2013. (in Chinese with English abstract)
Design and test of eject lifting type pot seedling detaching device
Feng Shijie1,2, Wu Mingliang1,3※, Yan Bo1, Quan Wei1
(1.410128; 2.464000,; 3.,410128,)
Aiming at the problems of seedlings injury, seedling pot cracking and high matrix loss rate in the operation process of automatic seedling device, a eject lifting type device for pot seedling detaching from movable tray was designed. The device was mainly composed of seedling tray conveyor, tray positioning mechanism, opening and lifting mechanism and control system. According to the structure of the movable tray, a three-dimensional positioning mechanism composed of half Y shaped positioning bars, guidancepositioningwheels and positioning plates was designed to position the tray from longitudinal, transverse and vertical directions, so as to ensure that movable tray could be accurately positioned in operating area. According to the characteristics that the pot hole of movable tray could be opened, an opening and lifting mechanism consisting of short push plate, long push plate and lifting platform was designed. Short push plate and long push plate were sequentially opened by longitudinal side plate and lateral side plate which were used for movable tray positioning so as to separate seedling pot from pot hole. At the same time, after the separation, lifting platform lifted seedling pot which started to slide along the wall of pot hole from bottom and lifted it to the designed height for subsequent operations. The control system of device for seedling detaching from movable tray was designed. PLC controlled the operation of each driving motor according to the outputs signals of the movement sequence of each mechanism, so that each mechanism could coordinate in order to realize the automatic detaching of seedling pot from movable tray. In order to verify the operation effects of the device for seedling detaching from movable tray, bench experiments were carried out. Seedling pot lifting speed, type of the end face of lifting platform and moisture content of matrix of seedling pot were used as experimental factors. The qualified rate of position of seedling pot on the end face of the lifting platform and the loss rate of seedling pot matrix in process of seedling pot detaching from movable tray were taken as the evaluation indexes. Rapeseed seedlings of 35-day-old which were cultured in a 16-hole movable tray were used as the object. An experimental scheme of L9(34) orthogonal table was used for the bench experiments to study the influence of various factors on the evaluation indexes. Through the range analysis and variance analysis of experimental data, the influence order of each factor on the evaluation indexes were obtained, which were material type of end face of lifting platform, seedling pot lifting speed and moisture content of matrix of seedling pot. At the same time, the optimal parameter combination of the experimental factors was obtained in the experiments: the lifting speed was 32 mm/s, the material of the end face of lifting platform was rubber, and the moisture content of the matrix was 55%. Verification experiments with optimal parameter combination were carried out and the results showed the qualified rate of positions of seedling pot on the end face of the lifting platform was 100% and the loss rate of seedling pot matrix was 1.56%, which indicated that the device for seedling pot detaching from movable tray met the requirement of actual operations. The study provides important theoretical basis and reference for the design and further study on seeding automatic pick-up and transplanting mechanism.
agricultural machinery; design; tray; pot body; positioning mechanism; lifting platform; detaching device
2019-11-04
2020-01-18
國家油菜產(chǎn)業(yè)技術(shù)體系( CARS-12);湖南農(nóng)業(yè)大學(xué)“雙一流”建設(shè)項目(SYL201802018)
馮世杰,講師,博士生,主要從事農(nóng)業(yè)機械研究。Email:fsj_6688@126.com
吳明亮,教授,博士生導(dǎo)師,主要從事農(nóng)業(yè)機械創(chuàng)新設(shè)計研究,Email:mlwu@hunau.edu.cn
10.11975/j.issn.1002-6819.2020.05.006
S223.92
A
1002-6819(2020)-05-0050-09
馮世杰,吳明亮,顏 波,全 偉. 頂出托舉式缽苗脫盤裝置設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2020,36(5):50-58. doi:10.11975/j.issn.1002-6819.2020.05.006 http://www.tcsae.org
Feng Shijie, Wu Mingliang, Yan Bo, Quan Wei. Design and test of eject lifting type pot seedling detaching device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(5): 50-58. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.05.006 http://www.tcsae.org