基于無(wú)人機(jī)模式的道路交通監(jiān)控
2020-04-26 10:10:06儲(chǔ)澤楠趙凱任俊軍
河南科技 2020年4期
關(guān)鍵詞:無(wú)人機(jī)
儲(chǔ)澤楠 趙凱 任俊軍


摘 要:交通狀況對(duì)城市的發(fā)展至關(guān)重要,因此,加強(qiáng)道路交通監(jiān)控尤為重要。但是,傳統(tǒng)的固定式交通檢測(cè)裝置不夠靈活方便。為此,本文提出采用無(wú)人機(jī)拍攝道路交通狀況,通過(guò)視頻實(shí)現(xiàn)道路狀況監(jiān)測(cè)。該無(wú)人機(jī)平臺(tái)以Pixhawk為飛行控制器,搭載高度計(jì)、陀螺儀、GPS模塊和羅盤等各種傳感器,可以實(shí)現(xiàn)定高定點(diǎn)拍攝。為保證飛行穩(wěn)定性,筆者還設(shè)計(jì)了專用的處理器用以保存和傳輸視頻,大大減輕了飛行控制器的工作壓力。同時(shí),為了進(jìn)一步提高視頻的質(zhì)量,筆者從飛行穩(wěn)定性、實(shí)時(shí)電子穩(wěn)像和后期電子穩(wěn)像三個(gè)方面進(jìn)行優(yōu)化,消除視頻中的抖動(dòng)現(xiàn)象。無(wú)人機(jī)拍攝的視頻由地面的專用計(jì)算機(jī)進(jìn)行處理,從而得到道路交通狀況,并存入數(shù)據(jù)庫(kù)。
關(guān)鍵詞:無(wú)人機(jī);道路交通監(jiān)測(cè);車流量
中圖分類號(hào):U495;TP274文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1003-5168(2020)04-0100-03
Abstract: The traffic condition is vital to the development of a city, so it is very important to strengthen the road traffic monitoring. However, the traditional fixed traffic detection device is not flexible and convenient. For this reason, the authors proposed to use UAV to take photos of road traffic conditions, and realize road condition monitoring through video. The UAV is designed with Pixhawk as the flight controller and equipped with various sensors such as altimeter, gyroscope, GPS and compass. Therefore, the videos can be shot at fixed height and fixed position. In order to ensure the flight stability, we adopt a special processor to save and transmit videos, which greatly reduced the working pressure of the flight controller. In order to further improve the quality of videos, we optimize video processing to eliminate the jitter phenomenon in videos from three aspects: flight stability, real-time electronic image stabilization and post electronic image stabilization. The videos captured by the UAV are processed by a special computer on the ground, and then the road traffic conditions are obtained and stored in the database.
Keywords: UAV;road traffic monitoring;vehicle flow
近年來(lái),城市交通在城市發(fā)展過(guò)程中占據(jù)越來(lái)越重要的地位,各種智能交通手段被應(yīng)用于城市交通中。其中最重要的一項(xiàng)技術(shù)就是通過(guò)拍攝和處理交通視頻,獲取交通參數(shù),為相關(guān)部門提供技術(shù)依據(jù)。董天陽(yáng)等[1]針對(duì)前向和后向車輛的表觀特征不同,單純使用主流的HOG或者Haar-like特征來(lái)識(shí)別車輛存在對(duì)某一方向行駛的車輛識(shí)別率低或者誤識(shí)率高的問(wèn)題,提出了一種Haar-like和HOG特征結(jié)合的交通視頻車輛識(shí)別方法,并應(yīng)用于高速公路車輛的識(shí)別中。王雪鋒等[2]針對(duì)基于監(jiān)控視頻的車輛檢測(cè)識(shí)別問(wèn)題,給出了一種基于視頻監(jiān)控的面包車識(shí)別算法。該方法對(duì)于監(jiān)控視頻中已跟蹤的車輛,提取車輛的方向梯度直方圖(HOG)特征作為支持向量機(jī)(SVM)分類檢測(cè)的輸入,分類識(shí)別該車輛是否為面包車。王相森[3]介紹了實(shí)時(shí)視頻車輛識(shí)別和分類的幾種常用方法,并對(duì)其優(yōu)缺點(diǎn)進(jìn)行分析。然而,固定式的視頻拍攝不夠靈活,許多研究人員將無(wú)人機(jī)作為拍攝視頻的一種手段,并將這些視頻用于檢測(cè)或識(shí)別。舒威等[4]使用無(wú)人機(jī)對(duì)大型儲(chǔ)罐進(jìn)行視頻巡檢,并通過(guò)高質(zhì)量的拍攝視頻識(shí)別儲(chǔ)罐表面缺陷,大大減輕了常規(guī)檢查方法對(duì)罐體的損害。彭博等[5]針對(duì)懸停無(wú)人機(jī)視頻提出了基于形態(tài)分析的車輛自動(dòng)識(shí)別方法,且取得了較好的效果。本文借鑒無(wú)人機(jī)設(shè)計(jì)和基于視頻的車輛參數(shù)提取方法等內(nèi)容,設(shè)計(jì)了一套基于無(wú)人機(jī)視頻的車輛交通參數(shù)提取方案。該方案包括無(wú)人機(jī)設(shè)計(jì)、視頻拍攝穩(wěn)像方法和交通參數(shù)提取方法。通過(guò)該方案設(shè)計(jì)的無(wú)人機(jī)拍攝了兩段交通視頻,并將這兩段視頻用于交通參數(shù)提取,取得了較好的效果。
1 交通無(wú)人機(jī)設(shè)計(jì)
作為道路交通監(jiān)控的主體,無(wú)人機(jī)的設(shè)計(jì)非常重要,需要兼顧飛行穩(wěn)定性和視頻數(shù)據(jù)采樣處理。因此,筆者在設(shè)計(jì)無(wú)人機(jī)平臺(tái)時(shí),將飛行控制與視頻采集處理分開(kāi)設(shè)計(jì),以保證無(wú)人機(jī)的穩(wěn)定性。
無(wú)人機(jī)飛行控制采用Pixhawk飛控平臺(tái),搭載開(kāi)源的飛行控制固件,成熟穩(wěn)定且利于二次開(kāi)發(fā)。為了能夠充分利用Pixhawk飛行控制模塊的功能,除了利用該飛行控制模塊自帶的傳感器外,還配置了以下部件:外部GPS和羅盤用于定位、定高和測(cè)量角度,外部數(shù)字空速傳感器用于檢測(cè)失速,電源管理模塊用于分配鋰電池提供電力和驅(qū)動(dòng)電機(jī),PPM接收機(jī)用于接收遙控器的信號(hào),外部蜂鳴器、安全開(kāi)關(guān)、LED等用于輔助調(diào)試和控制。
無(wú)人機(jī)平臺(tái)視頻采集處理采用高性能32位處理器STM32F407,連接攝像頭模塊,將拍攝的視頻保存到SD卡中存儲(chǔ)。另外,如果需要實(shí)時(shí)傳輸視頻,還可以通過(guò)2.4G無(wú)線傳輸模塊將視頻直接傳輸至地面接收計(jì)算機(jī)。該無(wú)人機(jī)總體設(shè)計(jì)方案如圖1所示。
2 攝像機(jī)防抖動(dòng)
受風(fēng)力或轉(zhuǎn)向等因素的影響,無(wú)人機(jī)在飛行過(guò)程中會(huì)不可避免地出現(xiàn)抖動(dòng),從而直接影響攝像頭拍攝到的畫面質(zhì)量。抖動(dòng)特別厲害的視頻將無(wú)法被用于后續(xù)處理。因此,為保證攝像畫面的質(zhì)量,消除畫面中的抖動(dòng),筆者在無(wú)人機(jī)平臺(tái)設(shè)計(jì)過(guò)程中采用了三步視頻防抖動(dòng)策略。
2.1 無(wú)人機(jī)飛行姿態(tài)平穩(wěn)控制
四旋翼無(wú)人機(jī)的模型具有非線性、強(qiáng)耦合、干擾敏感等特性,控制難度較大,因此,可以將其看成近似線性的。在這里,筆者采用小擾動(dòng)線性化理論對(duì)四旋翼無(wú)人機(jī)模型進(jìn)行線性化。線性化后的小擾動(dòng)運(yùn)動(dòng)方程組為:
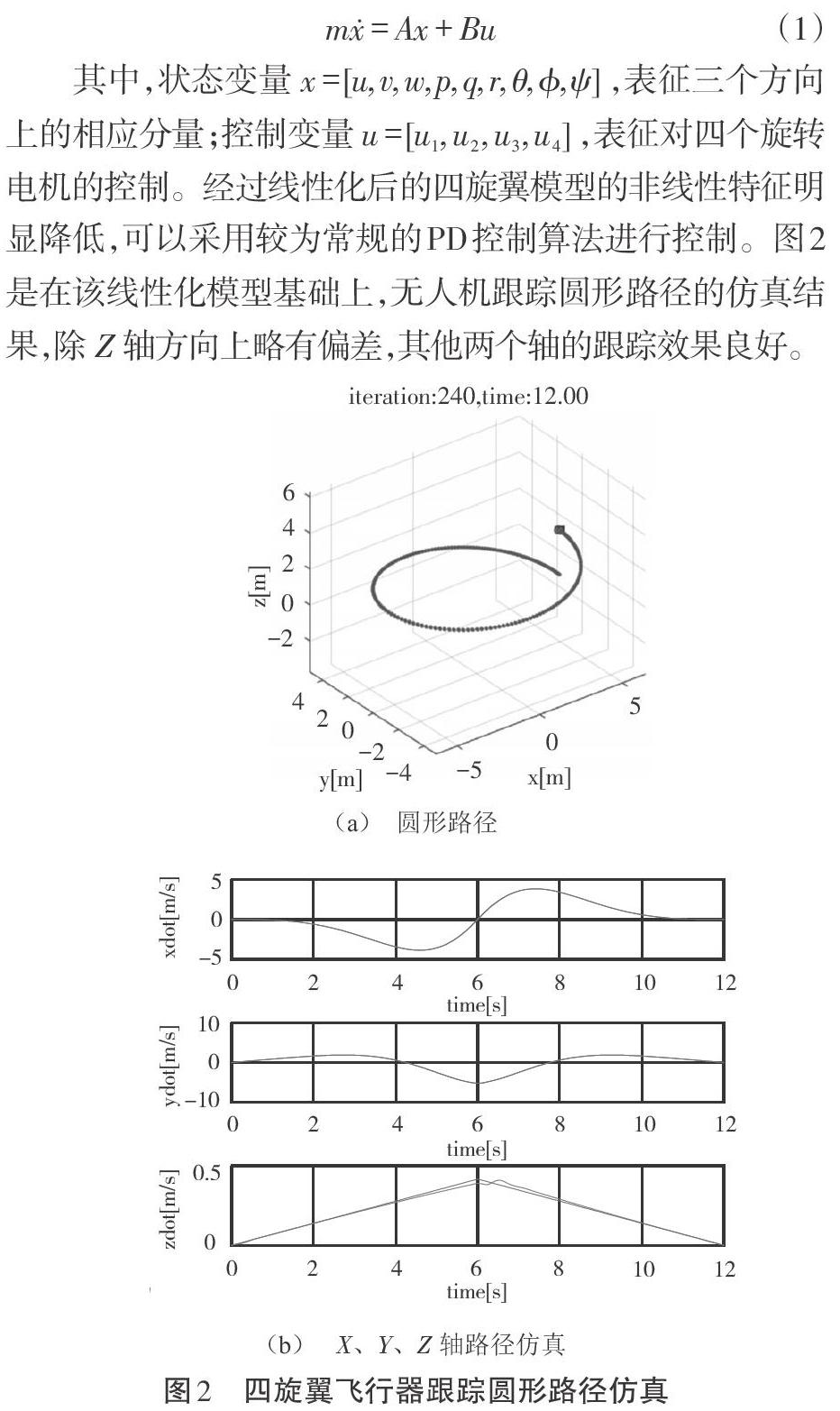
其中,狀態(tài)變量[x=[u,v,w,p,q,r,θ,?,ψ]],表征三個(gè)方向上的相應(yīng)分量;控制變量[u=[u1,u2,u3,u4]],表征對(duì)四個(gè)旋轉(zhuǎn)電機(jī)的控制。經(jīng)過(guò)線性化后的四旋翼模型的非線性特征明顯降低,可以采用較為常規(guī)的PD控制算法進(jìn)行控制。圖2是在該線性化模型基礎(chǔ)上,無(wú)人機(jī)跟蹤圓形路徑的仿真結(jié)果,除[Z]軸方向上略有偏差,其他兩個(gè)軸的跟蹤效果良好。
2.2 實(shí)時(shí)電子穩(wěn)像
實(shí)時(shí)電子穩(wěn)像是指在視頻拍攝過(guò)程中,實(shí)時(shí)對(duì)拍攝的視頻進(jìn)行處理,消除拍攝時(shí)的抖動(dòng),達(dá)到穩(wěn)定畫面的目的。因?yàn)閺?qiáng)調(diào)實(shí)時(shí)性,所以對(duì)算法的復(fù)雜度有較高的要求,筆者選擇灰度投影算法。
灰度投影算法實(shí)際上是將二維的圖像信息轉(zhuǎn)換為一維的數(shù)據(jù)進(jìn)行處理。該算法根據(jù)標(biāo)準(zhǔn)的幀間計(jì)算獲得相關(guān)性,然后再進(jìn)行運(yùn)動(dòng)補(bǔ)償。一般情況下需要經(jīng)過(guò)圖像映射、投影濾波和相關(guān)性計(jì)算三個(gè)步驟。圖3是視頻參考幀行和列的投影曲線。
2.3 后續(xù)電子穩(wěn)像
后續(xù)電子穩(wěn)像是在地面接收計(jì)算機(jī)獲得視頻數(shù)據(jù)后,再次對(duì)視頻進(jìn)行穩(wěn)像處理。這時(shí),實(shí)時(shí)拍攝已經(jīng)結(jié)束,對(duì)實(shí)時(shí)性的要求并不高,而要求穩(wěn)像的質(zhì)量和魯棒性。因此,筆者選擇較為穩(wěn)定和精度更高的算法。盛安等提出了一種基于模糊聚類的運(yùn)動(dòng)估計(jì)方法,從而分割出前景和背景運(yùn)動(dòng)分量。該方法能提取出全局的最優(yōu)運(yùn)動(dòng)矢量,極大地提高了視頻質(zhì)量。筆者在后續(xù)電子穩(wěn)像中使用了該算法。
3 交通參數(shù)提取
在道路交通中,最為看重的是路口通行的車流量參數(shù)。如果通過(guò)無(wú)人機(jī)拍攝的視頻計(jì)算路口車流量,首先需要識(shí)別出視頻中的車輛個(gè)數(shù),進(jìn)而才能計(jì)算車流量。無(wú)人機(jī)拍攝的視頻經(jīng)過(guò)三步穩(wěn)像以后,基本上可以達(dá)到識(shí)別車輛的要求。在車輛識(shí)別算法中,為了提高運(yùn)算速度,減少車輛識(shí)別時(shí)間,筆者使用了較為簡(jiǎn)單的背景差法提取圖片中的車輛。另外,為了能計(jì)算通過(guò)路口的車輛數(shù)和平均車速,筆者在視頻中指定了區(qū)域,以通過(guò)此區(qū)域的時(shí)間計(jì)算平均車速。
4 結(jié)論
與固定的攝像設(shè)備相比,無(wú)人機(jī)拍攝具有較高的靈活性。如果能將無(wú)人機(jī)拍攝的視頻進(jìn)行穩(wěn)像和優(yōu)化處理,保證后續(xù)視頻識(shí)別的要求,那么基于無(wú)人機(jī)視頻的交通參數(shù)提取將具有較高的性價(jià)比,可以隨時(shí)監(jiān)控任何地方的交通狀況。然而,無(wú)人機(jī)機(jī)載設(shè)備的運(yùn)算能力有限,不能實(shí)時(shí)處理拍攝的視頻信息,具有一定的滯后性。因此,如何提高機(jī)載設(shè)備的運(yùn)算能力,進(jìn)一步簡(jiǎn)化基于視頻的交通參數(shù)提取算法是下一步要研究的內(nèi)容。
參考文獻(xiàn):
[1]董天陽(yáng),阮體洪,吳佳敏,等.一種Haar-like和HOG特征結(jié)合的交通視頻車輛識(shí)別方法研究[J].浙江工業(yè)大學(xué)學(xué)報(bào),2015(5):34-38.
[2]王雪鋒,葉飛.一種基于HOG與SVM的監(jiān)控視頻車輛識(shí)別方法[J].微型機(jī)與應(yīng)用,2013(17):38-41.
[3]王相森.基于視頻的實(shí)時(shí)車輛識(shí)別和分類的改進(jìn)方法[J].微處理機(jī),2003(1):17-19.
[4]舒威,楊賢昭,楊艷華,等.基于無(wú)人機(jī)視覺(jué)的儲(chǔ)罐表面缺陷檢測(cè)方法[J].高技術(shù)通訊,2019(8):799-807.
[5]彭博,蔡曉禹,周濤,等.基于形態(tài)分析的無(wú)人機(jī)視頻車輛自動(dòng)識(shí)別算法[J].重慶交通大學(xué)學(xué)報(bào)(自然科學(xué)版),2019(4):19-26.
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國(guó)科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
