離岸深水自動化集裝箱碼頭堆場工藝設計探討
2020-04-27 08:21:56張文東
港工技術 2020年2期
關鍵詞:設備
張文東
(中交第二航務工程勘察設計院有限公司,湖北 武漢 430071)
引 言
自21世紀以來,隨著船舶大型化和勞動力成本的不斷增加,自動化集裝箱碼頭的建設蓬勃發展。國內外涌現了一批自動化集裝箱碼頭,例如Euromax碼頭,RWG碼頭,BEST碼頭,青島前灣碼頭,洋山四期碼頭等。
自動化集裝箱碼頭的裝卸工藝設計特別是自動化堆場工藝設計,是自動化集裝箱碼頭的核心所在,對平面布置、裝卸效率、建設投資、運營成本、交通組織等起著決定性的作用。目前這些典型自動化集裝箱碼頭基本上都是與陸上交通連接的自動化集裝箱碼頭。對于這類碼頭,在工藝設計上有了一定的經驗,形成了一套比較成熟的國內外專家認可的設計方案。而對于離岸深水自動化集裝箱碼頭,還沒有工程實例作為參考。本文基于意大利某離岸深水自動化集裝箱碼頭工程,結合項目的具體要求和已有自動化集裝箱碼頭的設計經驗,對自動化堆場的布置型式及堆場設備選型進行探討,為類似工程設計提供參考、借鑒。
1 工程概況
意大利某離岸深水自動化集裝箱碼頭工程碼頭一側為2個干線泊位靠泊8 000~18 000 TEU集裝箱船;碼頭另一側為12個穿梭船泊位靠泊384 TEU定制駁船;中間為堆存普通重箱、空箱的自動化堆場。該項目的吞吐量為134.8萬TEU/年(干線泊位),其碼頭和自動化堆場的平面尺度控制在1 000 m×200 m的范圍內。其與裝卸工藝相關的輸入條件見表1。

表1 裝卸工藝相關輸入條件
2 意大利離岸深水自動化集裝箱碼頭特點
根據工程的設計要求,本工程與現有典型自動化集裝箱碼頭相比,具有如下的特點:
1)全部為水-水中轉,沒有水-陸中轉,沒有外來車輛的裝卸要求;
2)大船停靠在碼頭一側,而小船停靠在碼頭另一側,與現有典型自動化集裝箱碼頭泊位位于同側有較大差別。
3)堆場周轉快,運輸繁忙。
4)大船側及小船側裝卸船設備多,要求堆場設備效率高,數量多。
5)碼頭要求考慮一定的直取功能,且直取的比例較高。
6)整個碼頭在深水區形成陸域,為節省投資,堆場面積要求盡量小而緊湊;
7)自動化堆場區2側運輸設備均為AGV小車。
因此,此類碼頭與現有典型自動化堆場比較,布置型式及設備選取還應滿足如下要求:
1)堆場的利用率高;
2)堆場的面積小;
3)裝卸設備裝卸效率要求高;
4)有限的面積內堆場設備數量多。
3 堆場布置型式分析及探討
目前典型的自動化集裝箱碼頭作業區一般由集裝箱岸橋裝卸區+AGVS小車緩沖區+堆場AGVS車道區+交箱區+堆箱區+拖掛車裝卸區+拖掛車車道區等區域組成。目前典型自動化集裝箱堆場有垂直于碼頭岸線布置和平行于碼頭岸線布置兩種型式。
3.1 堆場垂直于碼頭岸線布置

圖1 典型自動化碼頭(堆場垂直于碼頭岸線布置)
堆場垂直于碼頭岸線布置的自動化集裝箱碼頭的箱區垂直碼頭岸線。根據交箱位置的不同,又分為箱區的端部交箱和箱區兩側交箱兩種布置型式。
箱區的端部交箱的布置型式,交箱區沿碼頭縱深布置,料條兩端交箱區的長度約為40 m。目前典型自動化碼頭多采用此種型式。
箱區的兩側交箱的布置型式,交箱區與堆場區并列布置,其整個作業區縱深較端部交箱的布置型式小,有利于提高堆場設備的作業效率和減少碼頭的所需的縱深,但增加了水平運輸設備的運輸距離,從而降低水平運輸設備的效率。目前典型自動化碼頭的水水中轉堆場有采用此種型式。
3.2 堆場平行于碼頭岸線布置
圖2 典型自動化碼頭(堆場平行于碼頭岸線布置)
堆場平行于碼頭岸線布置的自動化集裝箱碼頭料條平行于碼頭岸線。根據交箱位置的不同,同樣分為堆場端部交箱和堆場兩側交箱兩種布置型式。
堆場端部交箱的布置型式,交箱區沿碼頭岸線方向布置,每個端部交箱區的長度約為40 m。
堆場的兩側交箱的布置型式,交箱區與堆場區并列布置,有利于提高堆場設備的裝卸效率,但增加了水平運輸設備的運輸距離,從而降低水平運輸設備的效率。
3.3 堆場布置型式分析
箱區端部交箱的自動化集裝箱碼頭的堆場設備既負責裝卸作業,也負責集裝箱在箱區的運輸,箱區長度一般根據堆場設備的效率來確定料條的長度來確定。
箱區兩側交箱的自動化集裝箱碼頭的堆場設備只負責裝卸作業,箱區長度一般根據水平運輸車輛的要求來確定。
本工程離岸深水碼頭建設在20 m深水區,陸域形成的費用極高,而中轉碼頭的長度取決于泊位的長度和泊位的數量,因此長度方向是基本一定的,而寬度取決于堆場的布置型式、裝卸工藝要求,因此堆場的布置型式應選擇所需縱深較小的堆場布置型式。且本工程的功能要求主要為大船轉小船和小船轉大船,堆場堆存能力的要求并不高,堆場僅僅起緩沖作業,因此較一般的集裝箱碼頭來講,堆場的堆存天數較少,對堆場的堆存容量要求較低。
對于堆場垂直于碼頭岸線布置的自動化集裝箱碼頭,堆場堆箱區縱深一般在200~300 m較為合適,且一般配備2臺堆場設備剛好與堆場裝卸要求相匹配。而本工程如采用垂直于碼頭岸線布置縱深僅有50~70 m,所以當采用垂直于碼頭前沿線的布置型式時,無論采用箱區端部交箱還是箱區兩側交箱的布置型式,其縱深均不能滿足要求。故此種布置型式不適于本工程的特點及要求。
因此對于離岸深水自動化集裝箱碼頭采用平行堆場布置方案是比較合適的。
4 堆場設備選型分析及探討
在現有的自動化集裝箱碼頭堆場中,堆場裝卸設備有跨運車、自動化輪胎式起重機(ARTG)、高架橋式起重機、軌道式起重機(ARMG)等。
4.1 跨運車及其布置型式
集裝箱跨運車是用于碼頭和堆場間集裝箱水平穿梭搬運和堆場作業的設備。這種跨運車一般提升高度為堆二過三或者堆三過四。跨運車作為堆場作業的碼頭由于堆場內受跨運車車道和堆高的限制,堆場利用率不高。
4.2 輪胎吊(ARTG)及其布置型式
AERTG具有機動靈活(主要是轉場靈活方便)、調度方便、作業效率高、技術成熟、工作可靠等優點,已趨向定型標準化,設備投資較省。而自動化集裝箱碼頭中的AERTG的定位系統主要采用GPS定位系統,定位穩定性還有待進一步的提高。
4.3 軌道吊(ARMG)及其布置型式
ARMG為自動化全電力驅動設備,具有環保、節能、高效、低故障、維修使用成本低等諸多優點。ARMG的跨度可以按需要設計,且一般都比較大,跨下堆箱排數多,堆場利用率高。但跨度過大會影響操作靈活性,同時由于裝卸作業循環周期長,降低單機臺時效率,一旦出現翻箱、倒箱,其作業循環周期大,效率也將降低。故ARMG門架下一般跨10~20排箱。ARMG有無懸臂梁、單懸臂梁和雙懸臂梁等幾種型式。
無懸臂軌道吊:采用無懸臂軌道吊的自動化堆場,水平運輸設備不進入箱區,分別在箱區的兩端與軌道吊進行作業交接。軌道吊除完成集裝箱的裝卸、堆場作業,還需承擔集裝箱在箱區內的水平運輸,因此箱區長度對軌道吊的效率影響較大。如采用一臺堆場設備進行堆場作業在能力上是比較匹配的。但是當堆場設備損壞需要檢修時,此條堆場將無法進行堆場作用,不能碼頭堆場裝卸的功能要求,每個箱區內一般布置兩臺設備。為充分發揮2臺設備的效率,一般箱區長度在200~300 m。
單懸臂軌道吊:集裝箱交箱作業可以采用端部交箱,也可采用一側交箱的布置型式。當采用箱區端部交箱作業時,軌道吊承擔交箱作業和箱區內集裝箱的水平運輸,其同無懸臂軌道吊。當采用箱區單側交箱作業時,其交箱作業側設在懸臂下,軌道吊僅負責碼垛和裝卸,同一箱區的設備可以同時作業。
雙懸臂軌道吊:一般集裝箱交箱作業采用箱區兩側交箱的布置型式。采用雙懸臂軌道吊的自動化堆場,水平運輸設備進入堆場,與軌道吊的作業交接設在懸臂下,軌道吊不需承擔箱區內集裝箱的水平運輸,僅負責碼垛和裝卸,同一箱區的設備可以同時作業。雙懸臂軌道吊相較于單懸臂軌道吊堆場設備效率低,其有限面積的布置數量較單懸臂軌道吊少。
4.4 堆場設備選型分析
跨運車:由于采用跨運車作為堆場設備的堆場利用率不高,而本場在20 m深水區形成陸域,要求堆場具有較高的利用率,所以跨運車不予選擇。
輪胎吊:由于本項目所需的堆場面積較小,堆場設備卻較多,設備不需要進行轉場,而輪胎吊的定位系統主要采用GPS定位系統,定位精度不高,且較軌道吊的優勢主要優勢在于轉場,所以輪胎吊不予選擇。
雙懸臂軌道吊:由于本工程要求單位面積的裝卸效率要求高;有限的面積內堆場設備數量多,雙懸臂軌道吊的布置很難達到其要求,故不采用此設備。
因此本工程堆場設備采用無懸臂軌道吊、單懸臂軌道吊分別進行布置,進行方案的分析比選。
5 方案比選
基于以上分析采用在堆場平行于岸線布置型式的基礎上對無懸臂軌道吊、單懸臂軌道吊兩種機型分別進行方案設計,通過優缺點比選最終確定工藝方案。
5.1 無懸臂軌道吊的方案
該方案整個區域布置分干線碼頭裝卸作業區、AGV緩沖區、堆場作業區、駁船泊位裝卸區等幾個功能分區。干線碼頭裝卸區設置9臺雙小車集裝箱岸橋,軌道內側布置2條集裝箱拖掛車車道及布置放集裝箱船艙蓋版區域,軌道外側布置6條AGV車道,如圖3。

圖3 無懸臂軌道吊方案平面布置
AGV緩沖區布置于干線碼頭裝卸作業區和堆場作業區之間以及駁船碼頭裝卸作業區和堆場作業區之間,共布置兩個;堆場作業區布置在AGV緩沖區后方,共有6條箱區,采用12臺無懸臂軌道吊作為重箱、空箱作業機械,在每條堆場兩個端部均設有集裝箱交貨區,總共可布置1 908個箱位。駁船碼頭作業區配置8臺單小車集裝箱岸橋,軌道內側布置2條集裝箱拖掛車車道,軌道外側布置5條AGV車道。
5.2 單懸臂軌道吊的方案
該方案整個區域布置分干線碼頭裝卸作業區、AGV緩沖區、AGV水平運輸車道、堆場作業區、駁船泊位裝卸區等幾個功能分區,干線碼頭裝卸區布置同無懸臂軌道吊方案,其布置位置如圖4所示。
AGV緩沖區布置于每條堆場的兩端,共布置6個;AGV水平運輸車道布置于干線碼頭裝卸作業區和堆場作業區之間以及駁船碼頭裝卸作業區和堆場作業區之間。堆場作業區布置在AGV水平運輸車道后方,共有6條堆場,采用12臺單懸臂軌道吊作為重箱、空箱作業機械,在每條堆場單懸臂的下方均設有集裝箱交貨區,總共可布置2 760個箱位。駁船碼頭作業區布置同無懸臂軌道吊方案。

圖4 單懸臂軌道吊方案平面布置
5.3 方案分析比較
兩個方案的主要技術經濟指標比較見表2。
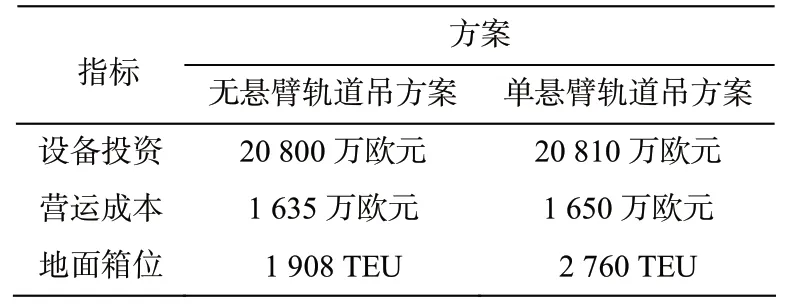
表2 主要技術指標比較
分析結論:兩個方案設備投資及營運成本無懸臂軌道吊方案略低,且差距不大。而兩個方案的主要差別在于堆場面積的利用率,單懸臂軌道吊方案堆場地面箱位數遠大于無懸臂軌道吊方案。
6 結 語
1)離岸深水自動化集裝箱碼頭要求堆場面利用率高,堆場面積小。
2)離岸深水自動化集裝箱碼頭要求堆場設備效率高,單位面積設備數量多。
3)箱區端部交箱的自動化集裝箱碼頭的箱區長度一般根據堆場設備的效率來確定料條的長度來確定。
箱區兩側交箱的自動化集裝箱碼頭的箱區長度一般根據水平運輸車輛的效率來確定。
4)對于離岸深水自動化集裝箱碼頭的堆場優先采用堆場平行岸線的布置型式。
5)對于離岸深水自動化集裝箱碼頭的堆場設備選用單懸臂軌道吊有利于增加堆場的利用率和堆場單位面積的裝卸效率。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
