四面六邊透水框架自動同步拋投裝置與工藝*
2020-04-28 13:52:28徐天暢張有鎖常留紅
水運工程 2020年4期
關鍵詞:施工
徐天暢,張 偉,唐 印,張有鎖,常留紅,徐 斌
(1.中交天航港灣建設工程有限公司,天津 300450;2.長沙理工大學 水利工程學院,湖南 長沙 410114)
四面六邊透水框架具有消能減阻的作用,能夠將流經框架的水流流速減小從而使泥沙形成落淤,進而達到淤臨造灘、控導河勢、減輕沖刷、穩定坡腳、保護堤岸的目的[1-2]。它具有透水性和生態性等優勢,同時取材方便、預制容易,因此四面六邊透水框架在江河湖泊航道整治工程中被大量使用,已逐漸成為航道整治工程中不可或缺的工程構件[3-4]。很多學者從透水框架的桿件長寬比、架空率、截面形狀及尺寸、框架群拋投長度及水流速度與流向等方面對透水框架的減速性能及其影響規律開展了系統研究[5-6],但是對其拋投工藝及其裝備的研究鮮見報道。
透水框架需要在空中甚至水下實現拋投,且拋投數量甚大,如長江干線武漢—安慶段6 m水深航道整治工程馬當河段透水框架數量達到75萬架。傳統的拋投透水框架方法是采用挖掘機拋投甚至是采用人工拋投,這兩種方法都存在每次拋投數量少、拋投效率低、安全隱患大、拋投成本高、拋投位置準確度低等問題。因此,亟待研發一種四面六邊透水框架空中自動同步拋投工藝與裝置,以提高拋投效率、降低拋投成本、提升拋投準確性、消除拋投安全隱患。
本文根據四面六邊透水框架的結構特點及拋投要求,進行不同拋投高度下透水框架漂距的理論分析,提出一種透水框架空中自動同步拋投裝置,并對其拋投工藝進行研究。
1 四面六邊透水框架結構形式
四面六邊透水框架采用鋼筋混凝土結構一次成型脫模而成,由上下兩部分組成,上部結構的桿件橫截面為梯形+圓弧,截面兩側的寬度均為100 mm;下部結構由3根桿件連接而成,每根桿件內放置1根φ10 mm的鋼筋拼接成一個整體,鋼筋總長為2 310 mm,桿件橫截面為梯形,尺寸為90 mm×100 mm×100 mm(上底×下底×高);上部3根桿件內各放置1根φ10 mm的鋼筋,每根鋼筋長750 mm,框架總質量為90.3 kg,構件如圖1所示。透水框架采用整體式模具在預制場內進行預制,一次振搗養護成型,省去了焊接、除銹、刷防銹漆等工藝環節,顯著提高了透水框架的生產效率。由于鋼筋均預埋在混凝土內部因而不會生銹,解決了焊接式透水框架容易被腐蝕、開裂而致使桿件散落的問題。
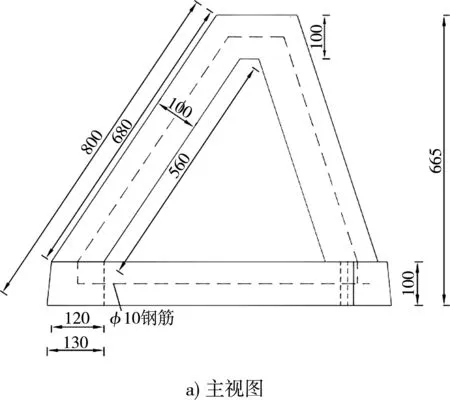
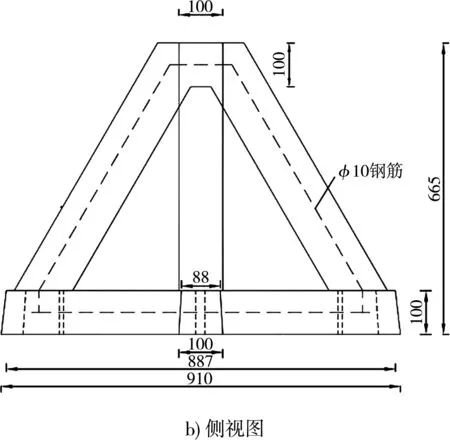

圖1 四面六邊透水框架(單位:mm)
2 透水框架拋投漂距理論
四面六邊透水框架在水面上方拋投后,受自身重力的影響會以一定的初速度進入水中,入水后在水下重力和水流繞流阻力雙重作用下,在下沉的同時還會順著水流方向產生漂距,拋投漂距直接影響到透水框架拋投的定位精度和護岸效果,因此需要分析透水框架拋投漂距[7]。
為了簡化計算,將四面六邊透水框架簡化為由6根長度、截面形狀及尺寸均相同的混凝土預制桿組裝而成,則其到達水面的初始速度為v0:
(1)
式中:s0為透水框架拋投點到水面的距離,即拋投高度;g為重力加速度。
透水框架在水下沉降時的有效重力W為:
W=Vg(ρs-ρ)
(2)
式中:V為透水框架體積;ρs、ρ分別為透水框架和水的密度。
透水框架下沉時受到水的繞流阻力F為:
(3)
式中:CD1為透水框架縱向繞流阻力系數;A1為下沉時阻水的投影面積即阻水面積;v1為瞬時沉降速度。
當透水框架在水中受到的繞流阻力F與其在水中的有效重力W相等時,則透水框架以穩定速度v下沉:
(4)
透水框架下沉過程中,當其在水面的初始速度小于穩定沉速時,沉速會逐漸增大;當初始速度大于穩定沉速時,則沉速不斷變小,最后趨于穩定。考慮入水時的邊界條件t=0時,v1=v0,則透水框架的瞬時沉速v1為[8]:
(5)

根據瞬時沉速和水深,可以獲得透水框架由水面下沉到水底所需的時間t:
(6)
水流中的透水框架在水平面內只受水流的推力,根據牛頓第二定律可知:
(7)
式中:CD2為修正系數;A2為透水框架在水流方向的投影面積及水推面積;u為水流速度;v為透水框架在水流方向的瞬時速度。

(8)
單個透水框架漂距試驗是在長、寬、深分別為42、0.8、0.8 m的水槽中進行,試驗流速為0.08~0.43 ms(原型流速為0.44~2.34 ms),試驗水深為0.20~0.38 m(原型水深為6.0~11.4 m)。將透水框架從水面上50 mm(原型水面上1.5 m)處拋投,測量透水框架拋投點至沉底點順著水流方向的位移,計算其漂距。試驗設計滿足幾何相似和水流運動相似條件,采用正態模型,幾何比尺λL=λH=30,流速比尺λu=λH=5.47,流量比尺λQ=λLλHλu=4 923。每組試驗重復10次,取平均值予以分析。依據實際透水框架,以幾何相似原則制備模型,材質為鋁合金,密度為2.55 tm3,與鋼筋混凝土的密度接近。透水框架模型桿長為27 mm,桿件截面為3.3 mm×3.3 mm的正方形。漂距與水深、流速的關系見圖2,其中前面10組即空心點為測定的數據,由此可以反推擬合求得式(8)中的CD1=0.78、CD2=1.64,將其余的5組數據即實心點與采用式(8)計算所得的漂距進行比較,可以發現理論計算值與實驗測量值吻合很好。
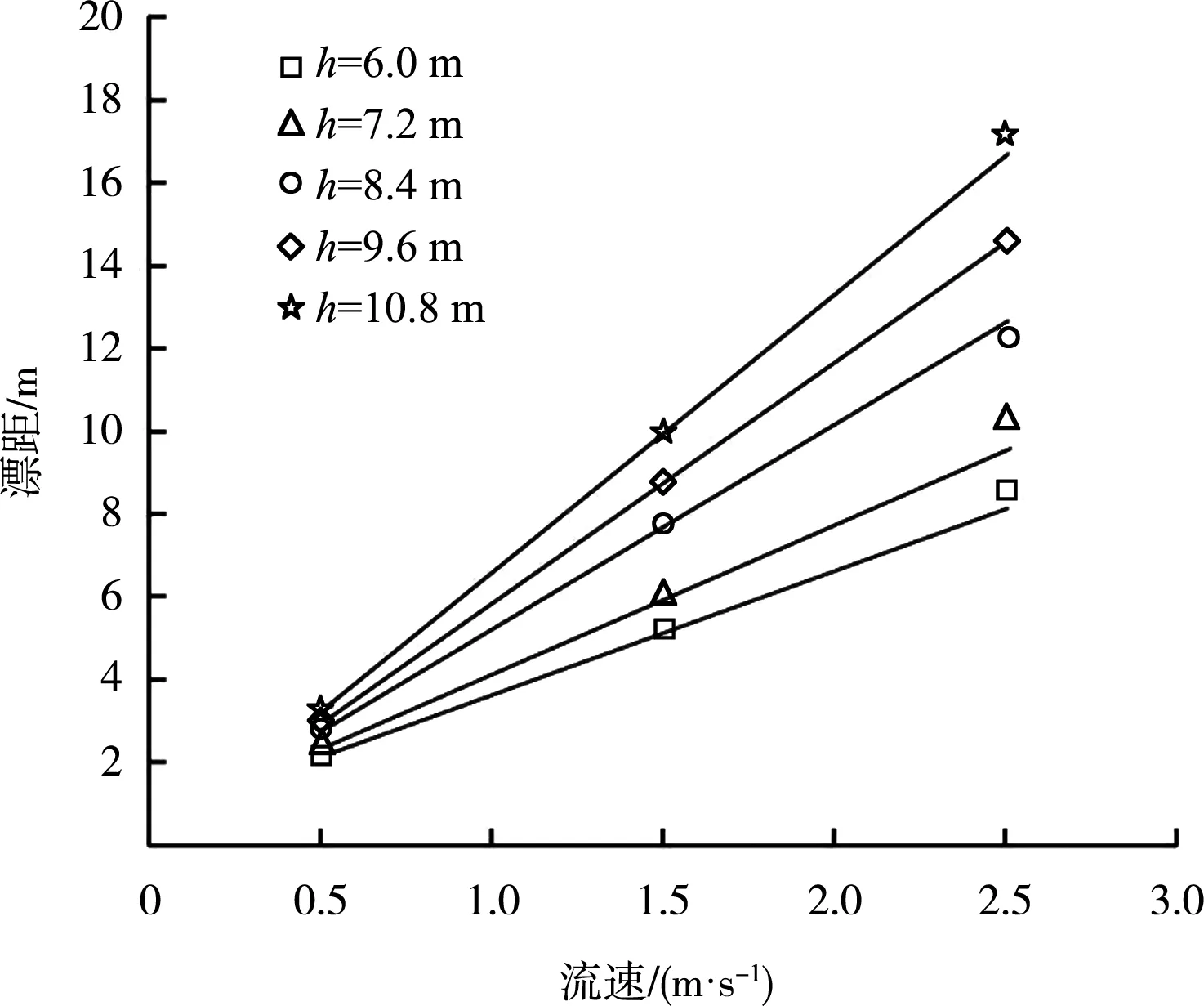
圖2 漂距隨水深和流速的變化
3 透水框架空中自動同步拋投裝置
為了提高透水框架的拋投效率、減輕勞動強度,提出一種空中自動同步脫鉤的吊具,如圖3所示。吊具是由主吊架、副吊架和轉軸組成;主吊架是由網格狀的主框架、軸承座、主吊架吊耳、導向管和下限位板組成,外部起重機主纜繩連接主吊架吊耳可以升降主吊架,主框架兩端上表面分布有導向管和下限位板。副吊架是由網格狀的副框架、副吊架吊耳、導桿、上限位板和脫鉤吊耳組成,外部起重機副纜繩連接副吊架吊耳可以升降副吊架,副框架的兩端下表面對應于主框架的下限位板位置分布有上限位板,下表面對應于主框架的導向管位置分布有導桿。轉軸是由鋼管、半圓掛環、繩槽、封閉掛環和開口掛鉤組成。副吊架的導桿插入主吊架的導向管內,副吊架與主吊架相對運動時起導向作用;采用螺栓將主吊架的下限位板和副吊架的上限位板連接起來,下限位板上開有導向槽,從而主吊架與副吊架可以相對運動,并通過下限位板和上限位板限制二者的極限位置。當副框架受拉提升向上移動至導向槽的極限位置時,導向管與導桿不會相互分離。
懸掛有透水框架的吊具初始狀態見圖4。繩索的一端系在封閉掛環上,另一端穿過透水框架掛在開口掛鉤上,在繩索和透水框架的重力作用下封閉掛環和開口掛鉤正好位于鋼管的正下方,起重機的主纜繩提起主吊架吊耳并將已經懸掛好透水框架的吊具移至拋投水域。
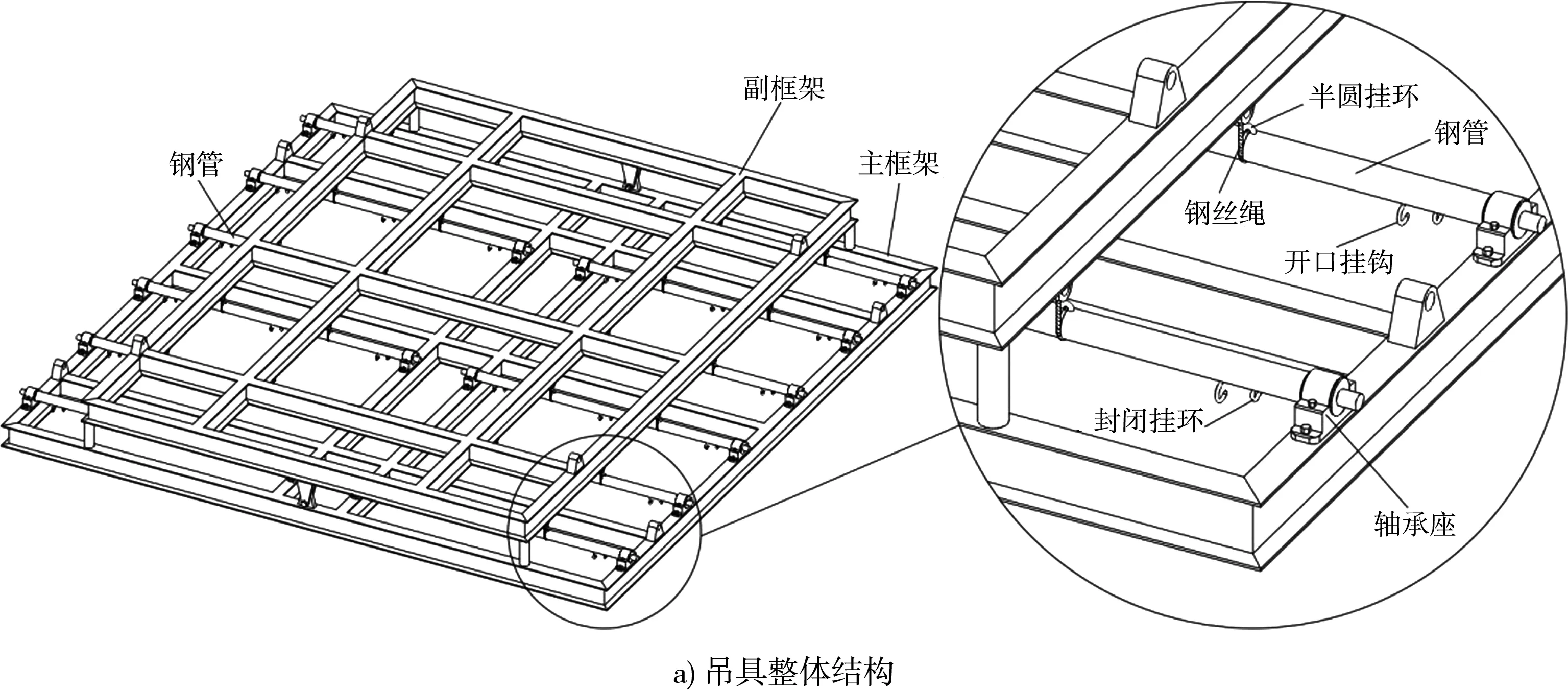

圖3 空中自動同步脫鉤的吊具結構
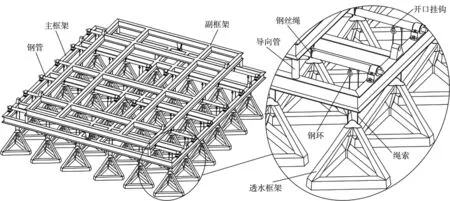
圖4 懸掛有透水框架的吊具初始狀態
到達拋投水域后,起重機的副纜繩向上提起副吊架吊耳,副吊架受拉提升向上移動,系在副吊架脫鉤吊耳上的鋼絲繩拉動轉軸上的半圓掛環運動,從而帶動轉軸旋轉,當轉軸旋轉至拋投臨界角度時,鋼環處于從開口掛鉤上脫落的狀態。
副吊架受拉繼續向上移動至導向槽的極限位置,鋼絲繩帶動轉軸繼續旋轉,鋼環從開口掛鉤上脫落,透水框架脫離繩索掉入拋投水域,自動同步脫鉤拋投完成。副吊架受拉移動至導向槽極限位置且透水框架拋投后的狀態見圖5。

圖5 副吊架受拉移動至導向槽極限位置且透水框架拋投后的狀態
4 透水框架拋投工藝
為了提高透水框架的拋投準確度、實現拋投層數靈活可控,提出了一種透水框架空中自動同步脫鉤拋投工藝,拋投過程分為施工準備、透水框架裝船、定位船定位、掛鉤、空中自動同步脫鉤拋投、復位等步驟,如圖6所示。1)施工準備:進行工前檢測,測量繪制施工區水下地形圖;透水框架拋投采用網格法控制,提取、記錄每個網格坐標;由于本文每次實際拋投透水框架數量為36個,屬于群拋,因此每次拋投時透水框架的漂距會相互影響,因此采取式(8)理論計算和試投拋的方法,確定透水框架的拋投漂距。2)透水框架裝船:根據運輸船舶的艙容量,將預制好的透水框架按照2~6層疊成一套,吊放至船艙甲板上并疊放整齊。3)定位船定位:根據拋投漂距和網格的位置,計算定位船位置,透水框架運輸船停靠于定位船旁,然后利用全球定位系統(global position system,GPS)精確定位。4)掛鉤:采用定位船自帶的具有主、副吊鉤的起重機將吊具吊至運輸船船艙的透水框架上方,主吊鉤通過主纜繩吊住吊具的主吊架,副吊鉤通過副纜繩吊住吊具的副吊架,由人工將繩索穿過透水框架并將鋼環掛在開口掛鉤上,使得懸掛透水框架的繩索一端固定系在封閉掛環上,另一端系在鋼環上并掛在開口掛鉤上;通過起重機將懸掛有大量透水框架的吊具吊至拋投水域。5)空中自動同步脫鉤拋投:起重機吊掛有主吊架的主纜繩保持不動,提升副纜繩并帶動副吊架上升,轉軸及其上面的封閉掛環和開口掛鉤受鋼絲繩提升作用而繞轉軸自身軸線旋轉,當旋轉一定角度后鋼環能夠從開口掛鉤上脫落,透水框架脫鉤掉入水中,從而實現了透水框架的空中自動同步脫鉤拋投;下限位板和上限位板組合可以限制主吊架和副吊架的相對極限位置,從而限制了轉軸所能轉過的最大轉角,確保了鋼環及繩索能夠從開口掛鉤上脫落。6)復位:起重機保持主纜繩靜止不動,副吊鉤釋放副纜繩,副吊架下降,在繩索和鋼環的重力作用下轉軸會旋轉復位,封閉掛環和開口掛鉤回位到鋼管的正下方;重復步驟4)~6)直至該水域拋投施工完畢。7)檢測和移位:當某一水域拋投施工完畢后,用測深儀進行水下地形測量,以此分析透水框架拋投位置、單位水域的數量、覆蓋范圍,判斷施工是否滿足設計要求。達到設計要求后,用GPS指揮移動定位船,重復步驟1)~6),按照從河岸到河心、先淺水后深水的順序進行下一水域的透水框架有序拋投施工。
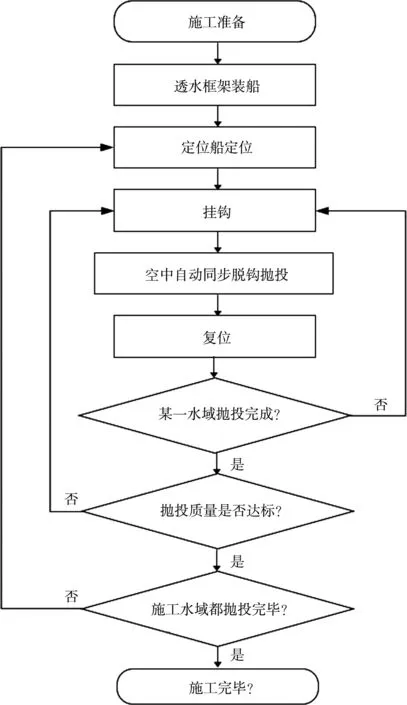
圖6 透水框架空中自動同步脫鉤拋投的工藝流程
本文采用大框架、多轉軸的空中自動同步脫鉤拋投吊具,增加了每次拋投透水框架的數量,并且采用繩索懸掛透水框架的方式,可同時懸掛的透水框架層數也可根據需求進行適時增減,使起重機得到充分利用,極大提高了拋投施工效率,縮短了施工工期。采用GPS引導拋投船舶精確定位至拋投施工區域,拋投施工過程中,可實時監控設計工作區平面位置和拋投船的實際工作區位置及水面高度等,實現了對拋投作業的實時控制,提高了透水框架拋投的準確性。采用機械化吊具進行透水框架的拋投,過程安全可控,有效避免了人工拋投存在的安全隱患,提高拋投施工的安全系數。
5 結論
1)本文通過建立四面六邊透水框架拋投漂距的數學模型,得出拋投高度、水深、水流速度、透水框架阻水面積、水推面積等參數對漂距的影響規律,水槽試驗結果表明理論分析準確,為透水框架的準確拋投提供了理論基礎。
2)本文提出一種大框架、多轉軸的空中自動同步脫鉤拋投吊具,增加每次拋投透水框架的數量,可同時懸掛的透水框架層數也可根據需求進行適時增減,提高拋投施工效率,縮短了施工工期。
3)采用GPS引導拋投船舶精確定位,并實時監控設計工作區平面位置和拋投船的實際工作區位置及水面高度,實現了對拋投作業的實時控制,提高透水框架拋投的準確性。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48