波浪滑翔機(jī)彈性水翼性能模型試驗(yàn)
2020-04-28 08:35:30周潤婕李家煒潘雨婷張芳園田新亮
實(shí)驗(yàn)室研究與探索 2020年1期
周潤婕,王 鵬,李家煒,潘雨婷,張芳園,田新亮
(上海交通大學(xué) 海洋工程國家重點(diǎn)實(shí)驗(yàn)室,上海 200240)
0 引 言
波浪滑翔機(jī)是一種依靠波浪能驅(qū)動的新型水面無人航行器,由于其利用波浪能作為前進(jìn)能量,可以實(shí)現(xiàn)無動力、長時間、長距離的航行[1-2],彌補(bǔ)了現(xiàn)有的海洋監(jiān)測設(shè)備在續(xù)航力上的不足。同時,其工作噪聲低,工作范圍在水面下20 m內(nèi),隱蔽性極好,不會對周圍環(huán)境造成過大影響,可用于環(huán)境監(jiān)測等民用功能,并且具有巨大的軍事價(jià)值。波浪滑翔機(jī)對于復(fù)雜、惡劣的氣候抵抗能力很強(qiáng),甚至一些情況下,海況越惡劣,波浪滑翔機(jī)動力越強(qiáng)勁[3],故其擁有廣泛使用前景。
波浪滑翔機(jī)最初于由Roger等于2005年研制。2009年,Liquid Robotics公司設(shè)計(jì)并研制出了新一代波浪滑翔機(jī)SV2,完成了多次海試任務(wù),并投入軍用。Frolov等[4]利用波浪滑翔機(jī)對蒙特雷灣的海藻生物分布情況進(jìn)行了長時間、長距離勘測。Daniel等[5]給出了波浪滑翔機(jī)設(shè)計(jì)的綜述,并給出了幾個不同型號的波浪滑翔機(jī)在海試試驗(yàn)中的結(jié)果,同時,對波浪滑翔機(jī)在蒙特雷海灣中進(jìn)行的實(shí)驗(yàn)的流速等進(jìn)行預(yù)估。Bingham等[6]測試了2臺波浪滑翔機(jī),并從自噪聲調(diào)查中得出這種新平臺傳播的噪聲很小,因此波浪滑翔機(jī)是可用于被動監(jiān)控的理想平臺。賈立娟等[7]對波浪滑翔機(jī)進(jìn)行研究,分析其運(yùn)動機(jī)理。丁乃蓬等[8]對波浪滑翔機(jī)水翼間距與水翼個數(shù)對波浪滑翔機(jī)的性能影響進(jìn)行研究。張禹等[9]應(yīng)用某勢流理論分析軟件對波浪滑翔機(jī)的運(yùn)動進(jìn)行模擬和仿真,發(fā)現(xiàn)波浪滑翔機(jī)在高海況下可以產(chǎn)生更大推力,但同時阻力也會相應(yīng)增加。呂元博等[10]根據(jù)CFD仿真模擬得出,水翼的最佳逆時針限位角與海況無關(guān),而順時針旋轉(zhuǎn)限位角隨具體海況的變化而變化。Wang等[11]采用牛頓-歐拉法建立了波浪滑翔機(jī)的4自由度數(shù)學(xué)模型,通過仿真模擬得出適當(dāng)?shù)睦|繩長度及波浪滑翔機(jī)母船與水下滑翔機(jī)部分的重量比能夠提高波浪能利用率。
現(xiàn)階段,國內(nèi)多家高校和科研機(jī)構(gòu)都對波浪滑翔機(jī)進(jìn)行了不同程度的研究,但總體來說,我國對于波浪滑翔機(jī)的創(chuàng)新還相對欠缺,研究規(guī)模不大[12]。
本文通過試驗(yàn)驗(yàn)證用于限定水翼下限位角的彈簧剛度與水下牽引機(jī)效率之間的關(guān)系,從而得出彈性水翼的最優(yōu)彈簧剛度。
1 波浪滑翔機(jī)與其彈性水翼工作原理
波浪滑翔機(jī)前進(jìn)原理為:波浪凸起過程中,水面母船隨之上浮并通過柔性纜繩拉拽水下牽引機(jī)產(chǎn)生上升運(yùn)動,此時,水翼向下翻轉(zhuǎn),表面流體產(chǎn)生一定速度,通過伯努利效應(yīng)以及流體分子動量改變給予水翼向前的推動力。波浪凹落的過程中,水面母船隨之下沉,水下牽引機(jī)在自身重力作用下產(chǎn)生下潛運(yùn)動,水翼向上翻轉(zhuǎn),流體同樣給予水翼向前的推動力(見圖1)。
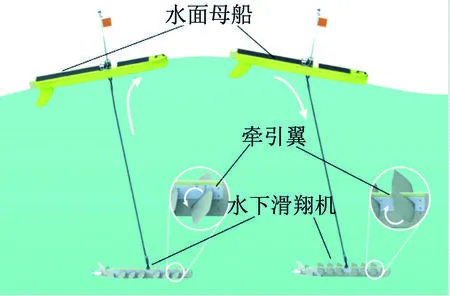
圖1 波浪滑翔機(jī)工作原理
由于水翼上升階段受到的向上的合力遠(yuǎn)遠(yuǎn)大于其下降階段所受的向下的合力,故水下牽引機(jī)主要在母船上浮時前進(jìn),并且水翼下翻速度遠(yuǎn)遠(yuǎn)大于上翻速度。若波浪滑翔機(jī)工作波高較大,則水翼下翻時,下限位角固定部件之間會產(chǎn)生較強(qiáng)的剛性碰撞,導(dǎo)致能量耗散以及部件疲勞損傷;若波浪滑翔機(jī)工作波高過小,水翼可能無法達(dá)到最大下限位角處,導(dǎo)致其無法正常上下翻動。若將水翼改進(jìn)為彈性水翼,即上限位角固定,下限位角由彈簧約束,則工作波高較大時,能避免水翼與下限位角產(chǎn)生剛性碰撞,將此部分能量儲存在彈簧中,防止結(jié)構(gòu)損傷;工作波高較小時,彈簧能給予水翼板一定的回復(fù)力,提供其前進(jìn)的動力(見圖2)。
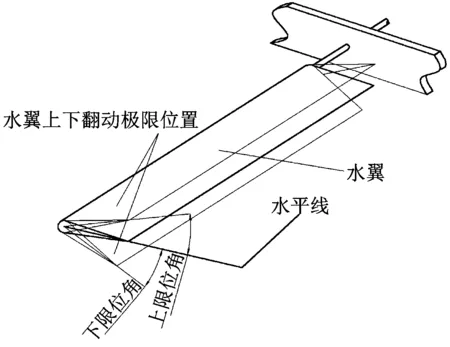
圖2 水翼相關(guān)角度定義示意圖
2 模型試驗(yàn)
2.1 試驗(yàn)準(zhǔn)備
(1) 試驗(yàn)設(shè)備。波浪滑翔機(jī)彈性水翼性能模型試驗(yàn)在上海交通大學(xué)海洋工程國家重點(diǎn)實(shí)驗(yàn)室小水槽中進(jìn)行。水槽長20 m,寬1 m,水深可達(dá)1 m,可根據(jù)不同試驗(yàn)需求調(diào)整水槽內(nèi)水量以改變水深。
試驗(yàn)使用一種用于研究波浪滑翔機(jī)運(yùn)動性能的垂蕩激勵試驗(yàn)拖車(見圖3)模擬水面母船對小車產(chǎn)生的拉力。該拖車包括拖車載體、垂蕩激勵控制設(shè)備。該設(shè)備可以通過伺服電機(jī)控制器控制與電動機(jī)相連的轉(zhuǎn)輪的的轉(zhuǎn)動幅度、周期等,轉(zhuǎn)輪上繞有鏈接水下牽引機(jī)的纜繩,轉(zhuǎn)輪通過纜繩實(shí)現(xiàn)對水下牽引機(jī)進(jìn)行不同垂蕩運(yùn)動的激勵,以模擬水上部分母船由于不同波浪作用而產(chǎn)生的對水下牽引機(jī)的垂向牽引力,并通過其在水槽上移動過一定距離所需的時間判斷波浪滑翔機(jī)水下牽引機(jī)部分的性能[13]。
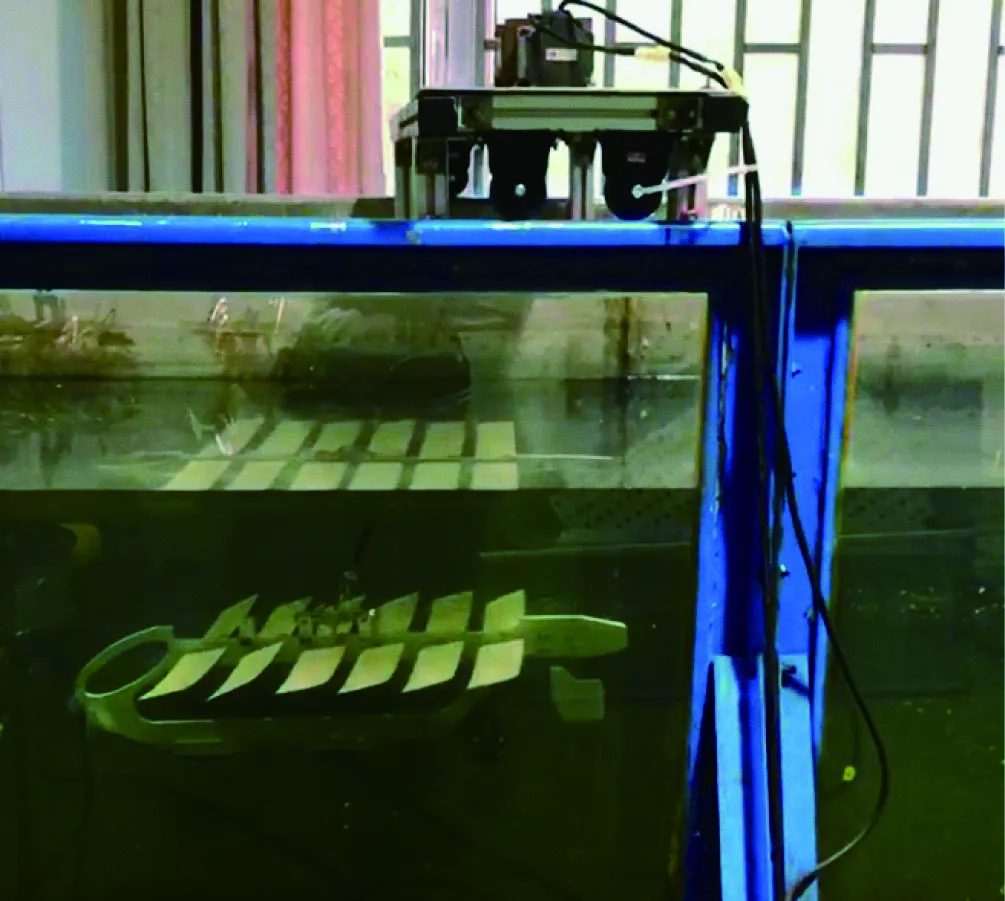
圖3 水下牽引機(jī)牽引垂蕩激勵拖車在水槽中運(yùn)動
水下牽引機(jī)部分主要包括骨架、水翼、尾舵,采用6對NACA水翼[14],用3D打印方式制作,質(zhì)量輕,同時可以保證翼型較精確且6對水翼形狀一致。水翼上限位角的大小通過一固定在牽引機(jī)機(jī)身的螺絲與一隨轉(zhuǎn)軸轉(zhuǎn)動的螺絲限制,下限位角通過一連與水翼邊緣與牽引機(jī)機(jī)身的彈簧進(jìn)行彈性限制(見圖4、5)。
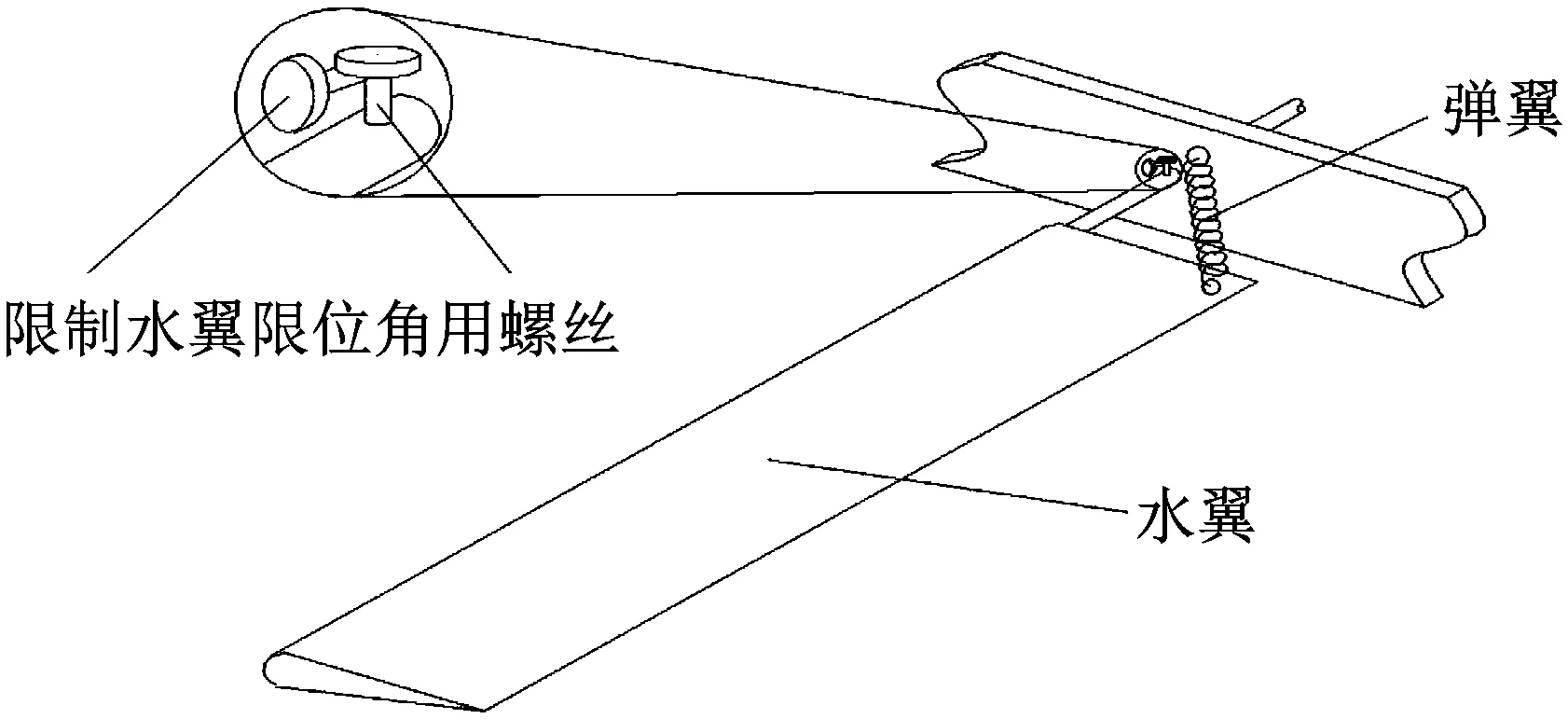
圖4 水翼角度限制方式示意圖

圖5 波浪滑翔機(jī)水下牽引機(jī)部分模型
根據(jù)模型尺寸,將彈簧長度選取范圍定為35~45 mm,彈簧半徑定為5 mm左右。此處試驗(yàn)選擇3種彈簧,并通過改裝測量動摩擦因子的摩擦臺[15],來完成彈簧勁度系數(shù)的測量。測量數(shù)據(jù)見表1,數(shù)據(jù)分析見圖6。

表1 勁度系數(shù)測量試驗(yàn)數(shù)據(jù)表
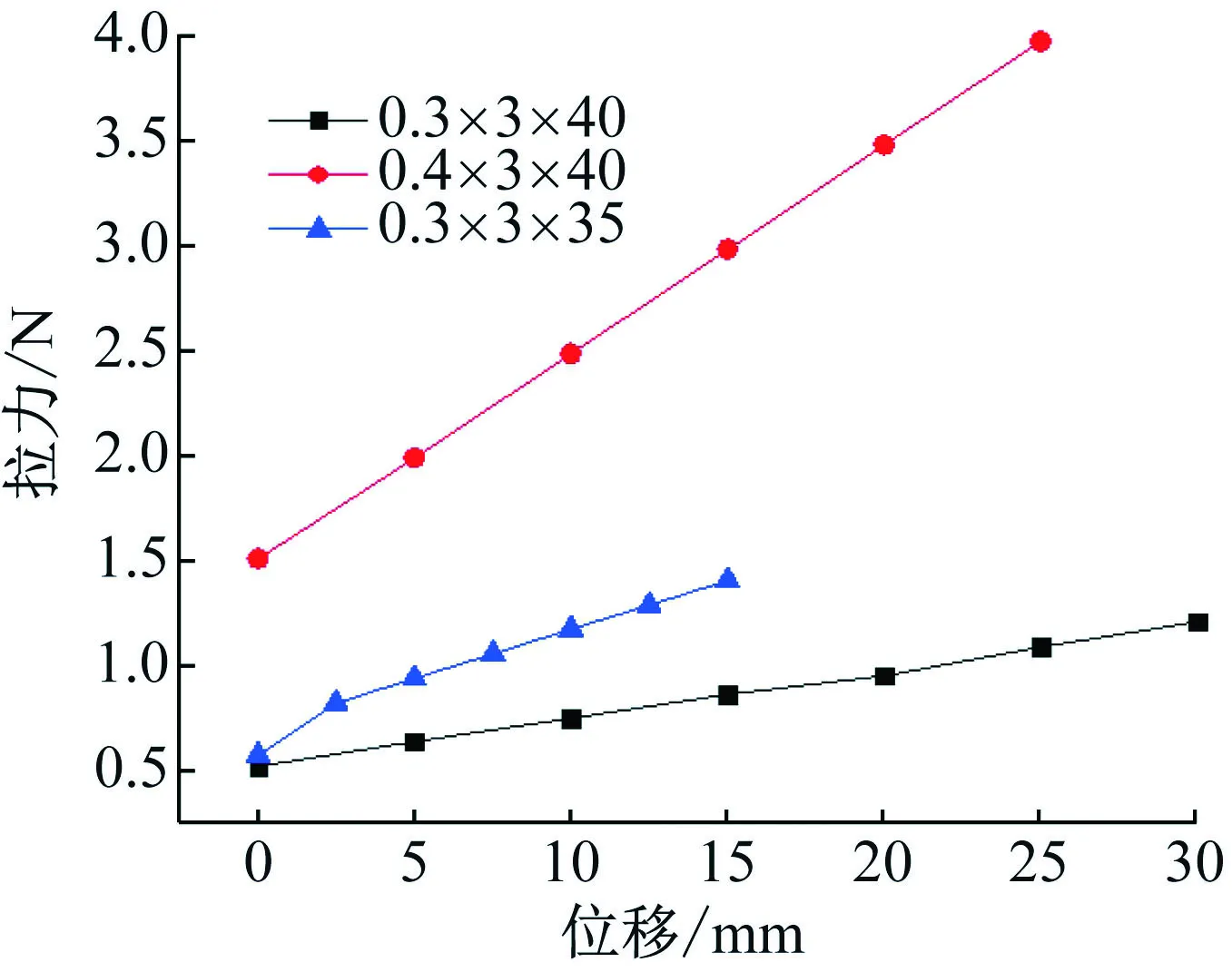
圖6 各彈簧所受拉力—伸長量關(guān)系圖
(2) 環(huán)境模擬。模型試驗(yàn)中忽略流體黏性的影響,保持兩者重力相似以及慣性力相似,即保持實(shí)體和模型之間的Froude數(shù)和Strouhal數(shù)相等,則有:
(1)
(2)

(3)
同理,式(2)可變形為:
(4)
根據(jù)我國海況,試驗(yàn)中計(jì)劃模擬0.8、0.75、0.68及0.6 m波高,實(shí)際波浪周期約為9 s。根據(jù)式(3)、(4)并計(jì)算拖車搭載電動機(jī)傳動比,波浪的實(shí)際參數(shù)與對應(yīng)的拖車電動機(jī)參數(shù)如表2所示。

表2 波浪實(shí)際參數(shù)與對應(yīng)電機(jī)參數(shù)
2.2 試驗(yàn)過程
本試驗(yàn)采用控制變量法,在彈性水翼使用某一種彈簧時,測量在幾個不同模擬波高下拖車的運(yùn)動速度。拖車的運(yùn)動速度通過測量拖車運(yùn)動一定距離(450 cm)的時間來確定。試驗(yàn)數(shù)據(jù)如表3~5和圖7所示。由于水槽表面不平整,拖車運(yùn)動速度變化較大,為方便觀測試驗(yàn)現(xiàn)象、減小誤差,將其運(yùn)動距離等分為3個區(qū)間,每個區(qū)間長度為150 cm。時間1、2、3分別為拖車經(jīng)過第1、2、3個區(qū)間所需時間(時間為“-”代表拖車在此區(qū)間內(nèi)動力不足無法前進(jìn))

表3 安裝彈簧1時拖車運(yùn)動情況

表4 安裝彈簧2時拖車運(yùn)動情況
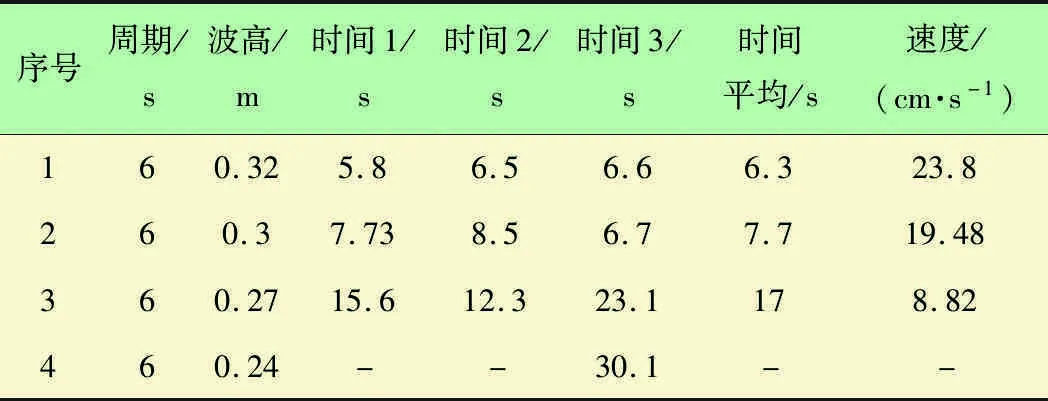
表5 安裝彈簧3時拖車運(yùn)動情況

圖7 水下牽引機(jī)彈性水翼安裝不同彈簧的效率示意圖
2.3 試驗(yàn)結(jié)果與分析
通過分析試驗(yàn)結(jié)果,使用相同剛度彈簧的情況下,電動機(jī)輸出振幅越大,拖車速度越快。這是由于隨著滑動拖車振幅增加,滑翔機(jī)垂向運(yùn)動速度增加,水翼上下表面的液體流速相應(yīng)增加,根據(jù)伯努利原理,水翼能產(chǎn)生更大推力;另一方面,振幅相同,即波浪條件相同的情況下,隨著波高的增加,安裝有較大剛度彈簧的水翼有著較高的推進(jìn)效率。這是由于在較大的波浪條件下,剛度較大的彈簧能夠儲存較多能量,避免水翼上下運(yùn)動過程中由于剛性碰撞而產(chǎn)生的能量損耗;另外還發(fā)現(xiàn),在滑動拖車振幅較小時,即波高較小時,安裝有較大剛度彈簧的水翼無法給予拖車足夠的拉力,在某一段區(qū)間出現(xiàn)無法移動的情況,而裝有較小剛度彈簧的水翼卻可以帶動拖車移動。這是因?yàn)樵诓ǜ咻^小時,彈簧剛度過大導(dǎo)致水翼上下運(yùn)動過程中限位角太小,推進(jìn)效率下降導(dǎo)致。因而在小波高情況下,剛度較小的彈簧能使水翼有較高推進(jìn)效率。綜上所述,波浪滑翔機(jī)水翼彈簧剛度應(yīng)該根據(jù)工作海域的海況決定,海況較惡劣的海域波浪滑翔機(jī)水翼可以選擇較大的彈簧剛度;反之,海況較溫和的海域波浪滑翔機(jī)水翼剛度不宜過大。
3 結(jié) 語
對水下牽引翼增加彈性限制可有效提高波浪能的利用率,從而提高水翼推進(jìn)效率。本文通過模型試驗(yàn)方法進(jìn)行了波浪滑翔機(jī)彈簧水翼性能研究,通過試驗(yàn)室自制的水槽滑動小車連接水下牽引機(jī)模擬在不同波高條件下彈性水翼的推進(jìn)性能。試驗(yàn)結(jié)果得出,波浪滑翔機(jī)水翼彈簧剛度應(yīng)該根據(jù)工作海域的海況決定,海況較惡劣的海域波浪滑翔機(jī)水翼可以選擇較大的彈簧剛度,反之海況較溫和的海域波浪滑翔機(jī)水翼剛度不宜過大。本文試驗(yàn)結(jié)果對設(shè)計(jì)在特定海況下的波浪滑翔機(jī)彈性水翼剛度提供了數(shù)據(jù)支撐。
