基于PNN的汽車ABS系統(tǒng)中壓力調(diào)節(jié)器和輪速傳感器的故障診斷
2020-04-29 13:02:40孫麗娜王佳慶黃永紅
計(jì)算機(jī)測(cè)量與控制 2020年4期
孫麗娜,王佳慶,黃永紅
(1.蘇州工業(yè)園職業(yè)技術(shù)學(xué)院 機(jī)電工程系,江蘇 蘇州 215123;2.江蘇大學(xué) 電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
0 引言
隨著汽車科技的進(jìn)步,汽車的速度在不斷地提高,當(dāng)汽車在高速下制動(dòng)或在滑溜路面上制動(dòng)的過(guò)程中,由于汽車的車輪產(chǎn)生抱死現(xiàn)象,很可能會(huì)出現(xiàn)車尾偏離行駛方向、汽車旋轉(zhuǎn)掉頭、駕駛員控制不了汽車行駛方向等危險(xiǎn)狀況,從而造成交通事故[1]。汽車防抱死制動(dòng)系統(tǒng)(anti-lock braking system,ABS)是指在汽車被要求強(qiáng)制減速或停車時(shí),為了防止車輪被抱死,其能夠自己主動(dòng)地控制制動(dòng)器可達(dá)到的最大滾動(dòng)摩擦力的大小,使車輪處于邊滾邊滑(滑移率在20%左右)的狀態(tài),以保證車輪與地面的附著力在最大值的一種主動(dòng)安全裝置[2-4]。
目前針對(duì)汽車防抱死制動(dòng)系統(tǒng)的故障診斷大多采用的是BP神經(jīng)網(wǎng)絡(luò),但是BP神經(jīng)網(wǎng)絡(luò)存在收斂速度慢、容易陷入局部極小值的問(wèn)題,并且在使用BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練時(shí),即使同一網(wǎng)絡(luò)模型每次訓(xùn)練的結(jié)果也都不相同[5]。概率神經(jīng)網(wǎng)絡(luò)(probabilistic neural network,PNN)是基于Bayes分類規(guī)則和Parzen窗的概率密度面數(shù)估計(jì)方法發(fā)展而來(lái)的并行算法[6-7]。由于PNN結(jié)構(gòu)簡(jiǎn)單、訓(xùn)練簡(jiǎn)潔、在故障診斷方面得到了廣泛的應(yīng)用。
在汽車防抱死制動(dòng)系統(tǒng)中,壓力調(diào)節(jié)器和輪速傳感器起著非常重要的作用,為了進(jìn)一步地完善汽車防抱死系統(tǒng)的制動(dòng)性能,本文利用概率神經(jīng)網(wǎng)絡(luò)對(duì)ABS系統(tǒng)的壓力調(diào)節(jié)器和輪速傳感器進(jìn)行故障診斷,并與BP神經(jīng)網(wǎng)絡(luò)進(jìn)行了比較。結(jié)果表明概率神經(jīng)網(wǎng)絡(luò)診斷耗時(shí)短,并且網(wǎng)絡(luò)一旦確定,訓(xùn)練結(jié)果不會(huì)改變。
1 防抱死制動(dòng)系統(tǒng)的結(jié)構(gòu)
典型的氣動(dòng)ABS系統(tǒng)結(jié)構(gòu)如圖1所示。
由圖1可以看出,防抱死制動(dòng)系統(tǒng)主要由輪速傳感器、壓力調(diào)節(jié)器(ABS調(diào)節(jié)器)、電子控制單元(ECU)三部分組成,另外還包括制動(dòng)氣室、儲(chǔ)氣筒、制動(dòng)踏板、繼動(dòng)閥、三通閥等。壓力調(diào)節(jié)器是汽車防抱死系統(tǒng)中最主要的執(zhí)行機(jī)構(gòu),每個(gè)控制通道中各設(shè)置一個(gè)壓力調(diào)節(jié)器,每個(gè)調(diào)節(jié)器分別對(duì)相應(yīng)的車輪進(jìn)行控制。每個(gè)車輪上各安裝一個(gè)轉(zhuǎn)速傳感器,將有關(guān)的車輪轉(zhuǎn)速的信號(hào)傳送到電子控制單元(electronic control unit,ECU)。ECU根據(jù)各車輪轉(zhuǎn)速傳感器輸入的信號(hào)對(duì)各個(gè)車輪的運(yùn)動(dòng)狀態(tài)進(jìn)行監(jiān)測(cè)和判定,并形成相應(yīng)的控制指令。壓力調(diào)節(jié)器受ECU的控制,對(duì)各制動(dòng)輪的制動(dòng)壓力進(jìn)行調(diào)節(jié)。
如果防抱死制動(dòng)系統(tǒng)的壓力調(diào)節(jié)器發(fā)生了故障,當(dāng)踏下制動(dòng)踏板時(shí),氣體壓力將直接進(jìn)入制動(dòng)氣室,車輪會(huì)突然抱死;如果汽車防抱死系統(tǒng)的輪速傳感器發(fā)生了故障,那么相應(yīng)車輪輪速就不能被識(shí)別而處于獨(dú)立運(yùn)行狀態(tài),這時(shí)ABS調(diào)節(jié)閥接收不到速度信號(hào)將會(huì)非常危險(xiǎn)。因此對(duì)壓力調(diào)節(jié)器和傳感器進(jìn)行故障診斷非常重要。
2 概率神經(jīng)網(wǎng)絡(luò)
概率神經(jīng)網(wǎng)絡(luò)[8-9]的結(jié)構(gòu)如圖2所示。

圖2 概率神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)

將PNN的第一層徑向基神經(jīng)元的輸入權(quán)值矩陣IW1,1設(shè)為Q個(gè)訓(xùn)練樣本對(duì)的轉(zhuǎn)置P′。當(dāng)網(wǎng)絡(luò)獲得到輸入時(shí),由|dist|函數(shù)計(jì)算得到一個(gè)向量。然后將該向量中的元素與偏差向量b中的元素逐個(gè)相乘,并把計(jì)算結(jié)果傳送給 radbas函數(shù)。經(jīng)過(guò)radbas函數(shù)計(jì)算之后,看輸入向量與哪一個(gè)樣本向量最接近,則a1中對(duì)應(yīng)的元素就接近于1。如果輸入向量與一系列訓(xùn)練樣本向量都接近的話,那么對(duì)應(yīng)的幾個(gè)元素的值都接近于1。
PNN的第二層權(quán)值矩陣LW2,1設(shè)為期望目標(biāo)響應(yīng)T。權(quán)值矩陣的每一個(gè)行向量中只有一個(gè)元素的值為1,對(duì)應(yīng)著一類輸入,其余元素的值均為0,然后計(jì)算矩陣乘積Ta1。最后,第二層神經(jīng)元采用競(jìng)爭(zhēng)傳遞函數(shù)計(jì)算n2,對(duì)其中最大的元素輸出為1,其余元素取為0。從而,PNN就完成了對(duì)輸入向量的劃分。
3 ABS系統(tǒng)故障診斷模型的建立
3.1 輸入輸出樣本的收集與設(shè)計(jì)
通過(guò)分析ABS系統(tǒng)的工作原理,并結(jié)合實(shí)際的運(yùn)行經(jīng)驗(yàn),確定網(wǎng)絡(luò)的輸入和輸出變量。本文只針對(duì)高附著路面,起車時(shí)制動(dòng)及單一的壓力調(diào)節(jié)器或傳感器發(fā)生故障時(shí)進(jìn)行研究。
3.1.1 確定網(wǎng)絡(luò)的輸入與輸出
在ABS系統(tǒng)中,壓力調(diào)節(jié)器會(huì)出現(xiàn)無(wú)故障F1、左前調(diào)節(jié)器故障F2、右前調(diào)節(jié)器故障F3、左后調(diào)節(jié)器故障F4、右后調(diào)節(jié)器故障F5共5種故障類型。每種類型所對(duì)應(yīng)的縱向車速P1、側(cè)向車速P2、左前輪輪速P3、右前輪輪速P4、左后輪輪速P5、右后輪輪速P6的變化趨勢(shì)不同。因此在對(duì)壓力調(diào)節(jié)器進(jìn)行故障診斷時(shí),確定P1、P2、P3、P4、P5、P6作為壓力調(diào)節(jié)器故障診斷模型的輸入變量,F(xiàn)1、F2、F3、F4、F5作為壓力調(diào)節(jié)器故障診斷模型的輸出。用二進(jìn)制的形式描述這5種故障類型分別為(1 0 0 0 0),(0 1 0 0 0),(0 0 1 0 0),(0 0 0 1 0),(0 0 0 0 1)。
在ABS系統(tǒng)中,輪速傳感器會(huì)出現(xiàn)無(wú)故障Y1、左前輪傳感器故障Y2、右前輪傳感器故障Y3、左后輪傳感器故障Y4、右后輪傳感器故障Y5共5種故障類型。每種類型所對(duì)應(yīng)的縱向車速X1、側(cè)向車速X2、左前輪輪速X3、右前輪輪速X4、左后輪輪速X5、右后輪輪速X6的變化趨勢(shì)也不同。所以在對(duì)輪速傳感器進(jìn)行故障診斷時(shí),確定X1、X2、X3、X4、X5、X6為輪速傳感器故障診斷模型的輸入變量,Y1、Y2、Y3、Y4、Y5為輪速傳感器故障診斷模型的輸出。用二進(jìn)制的形式描述這5種故障類型分別為(1 0 0 0 0),(0 1 0 0 0),(0 0 1 0 0),(0 0 0 1 0),(0 0 0 0 1)。
3.1.2 網(wǎng)絡(luò)輸入輸出樣本的采集
無(wú)故障時(shí)仿真條件為:路面附著系數(shù)為0.4,100%滑轉(zhuǎn)的附著系數(shù)為0.3,變速器5檔,4個(gè)車輪制動(dòng)力都為4e6N·m,初始車速22.5 m/s。參數(shù)KP為290,KI為70。
壓力調(diào)節(jié)器發(fā)生故障的仿真條件為:把哪個(gè)車輪制動(dòng)力達(dá)到最大12e6N·m(其他仿真條件與無(wú)故障時(shí)相同),就認(rèn)為哪個(gè)壓力調(diào)節(jié)器發(fā)生故障。在進(jìn)行數(shù)據(jù)采集時(shí),每種故障取10個(gè)樣本(5種故障),即0.3、0.4、0.5、0.6、1.5、1.8、3.2、3.8、4.2、4.5 s時(shí)的速度值,總共采集了50個(gè)樣本。
輪速傳感器發(fā)生故障的仿真條件:把哪個(gè)輪速信號(hào)斷開(其他仿真條件與無(wú)故障時(shí)相同),就認(rèn)為哪個(gè)輪速傳感器發(fā)生故障。在進(jìn)行數(shù)據(jù)采集時(shí),每種故障取7個(gè)樣本(5種故障),即2、2.5、3、3.5、4、4.5、4.7 s時(shí)的速度值,總共采集了35個(gè)樣本。文實(shí)驗(yàn)數(shù)據(jù)來(lái)自參考文獻(xiàn)[10]。
3.2 故障診斷模型的建立
3.2.1 壓力調(diào)節(jié)器故障診斷模型的建立
針對(duì)壓力調(diào)節(jié)器的故障診斷,將0.3、0.4、0.5、0.6、1.8、3.2、3.8、4.2、4.5 s時(shí)所采集的數(shù)據(jù)作為訓(xùn)練樣本。為了驗(yàn)證概率神經(jīng)網(wǎng)絡(luò)的故障診斷能力,本文將概率神經(jīng)網(wǎng)絡(luò)與BP神經(jīng)網(wǎng)絡(luò)進(jìn)行比較。在BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練過(guò)程中,用newff函數(shù)構(gòu)建一個(gè)BP神經(jīng)網(wǎng)絡(luò)。其參數(shù)設(shè)置如下:隱含層采用對(duì)數(shù)S型傳遞函數(shù)logsig,輸出層采用線性傳遞函數(shù)purelin,訓(xùn)練函數(shù)采用基于Levenberg-Marquardt的BP算法訓(xùn)練函數(shù)trainlm,網(wǎng)絡(luò)的最大訓(xùn)練次數(shù)設(shè)置為2000,訓(xùn)練誤差設(shè)置為0.001。另外,BP神經(jīng)網(wǎng)絡(luò)隱含層節(jié)點(diǎn)個(gè)數(shù)的選取非常重要,本文根據(jù)公式(1)確定隱含層節(jié)點(diǎn)的取值范圍。
(1)
式中,m為網(wǎng)絡(luò)的隱含層節(jié)點(diǎn)的個(gè)數(shù),n為網(wǎng)絡(luò)的輸入層節(jié)點(diǎn)的個(gè)數(shù),l為網(wǎng)絡(luò)的輸出層節(jié)點(diǎn)的個(gè)數(shù),α為1~10之間的常數(shù)。從3.1.1節(jié)可以看出,在對(duì)壓力調(diào)節(jié)器進(jìn)行故障診斷時(shí),輸入節(jié)點(diǎn)的個(gè)數(shù)為6,輸出節(jié)點(diǎn)的個(gè)數(shù)為5,代入公式(1),計(jì)算得m的取值為4~14。表1為隱含層節(jié)點(diǎn)在4~14范圍內(nèi)時(shí),利用BP神經(jīng)網(wǎng)絡(luò)對(duì)壓力調(diào)節(jié)器進(jìn)行故障診斷模型的訓(xùn)練結(jié)果。
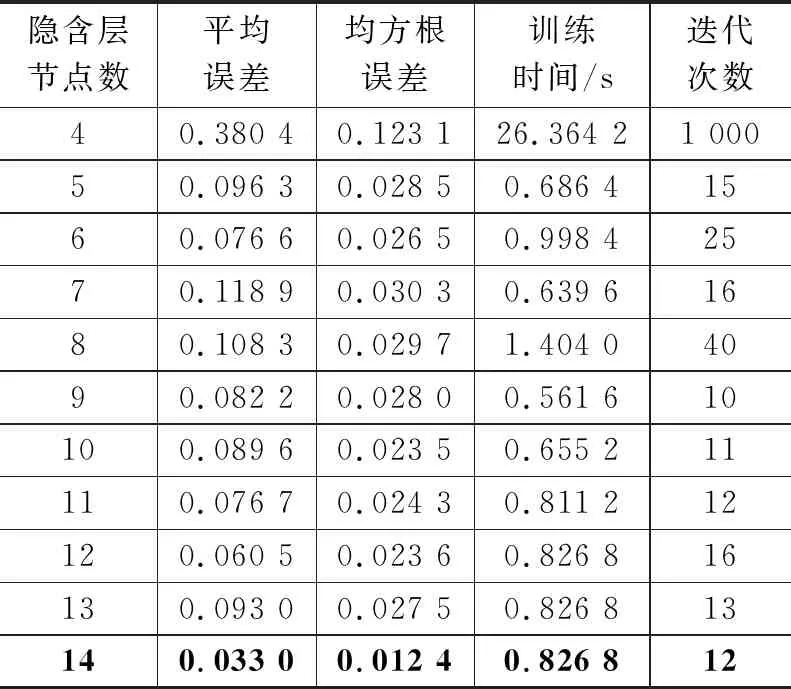
表1 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練結(jié)果(壓力調(diào)節(jié)器故障)
從表1中可以看出,當(dāng)隱含層節(jié)點(diǎn)數(shù)為14時(shí),網(wǎng)絡(luò)訓(xùn)練所得到的的均方根誤差最小,其值為0.012 4,此時(shí)網(wǎng)絡(luò)的平均絕對(duì)誤差為0.033,訓(xùn)練時(shí)間為0.826 8 s,迭代次數(shù)為12次,此時(shí)網(wǎng)絡(luò)訓(xùn)練過(guò)程的誤差變化如圖3所示。
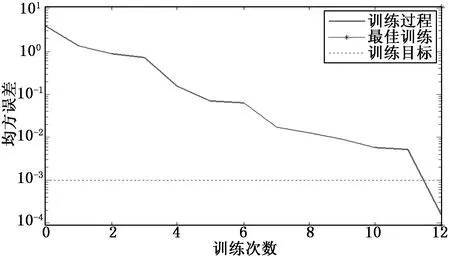
圖3 網(wǎng)絡(luò)訓(xùn)練過(guò)程的誤差變化(壓力調(diào)節(jié)器故障)
從圖3中可以看出,當(dāng)訓(xùn)練次數(shù)達(dá)到12步時(shí),達(dá)到了預(yù)設(shè)的訓(xùn)練誤差0.001,網(wǎng)絡(luò)訓(xùn)練收斂。
在概率神經(jīng)網(wǎng)絡(luò)訓(xùn)練過(guò)程中,利用newpnn函數(shù)建立網(wǎng)絡(luò),newpnn的函數(shù)形式為:net=newpnn(P,T,spread)。其中P為網(wǎng)絡(luò)的輸入向量,T為網(wǎng)絡(luò)的輸出向量,平滑因子spread的取值對(duì)網(wǎng)絡(luò)的訓(xùn)練性能產(chǎn)生很大的影響。本文在利用概率神經(jīng)網(wǎng)絡(luò)對(duì)壓力調(diào)節(jié)器的故障診斷模型進(jìn)行訓(xùn)練時(shí),平滑因子的取值選取從0.1~10(間隔為0.1),訓(xùn)練結(jié)果如表2所示。

表2 PNN平滑因子取值
從表2中可以看出,當(dāng)平滑因子取值為0~1.6時(shí),網(wǎng)絡(luò)訓(xùn)練的平均絕對(duì)誤差為0。當(dāng)平滑因子取值為1.7~10的過(guò)程中,隨著平滑因子取值的增大,平均絕對(duì)誤差也會(huì)階段性的增加。當(dāng)平滑因子取值為0~1.6時(shí),所對(duì)應(yīng)的網(wǎng)絡(luò)訓(xùn)練時(shí)間如表3所示。
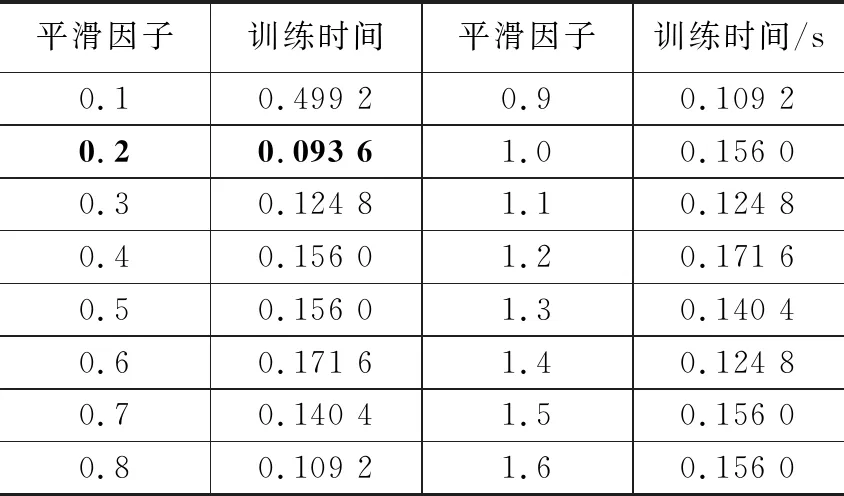
表3 PNN訓(xùn)練時(shí)間
從表3中可以看出,當(dāng)平滑因子的取值為0.2時(shí),訓(xùn)練時(shí)間最短為0.093 6,所以平滑因子的取值選為0.2。和BP神經(jīng)網(wǎng)絡(luò)相比,BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練時(shí)間是PNN的8.8倍,PNN訓(xùn)練后訓(xùn)練數(shù)據(jù)的分類效果如圖4所示。

圖4 PNN訓(xùn)練后的訓(xùn)練數(shù)據(jù)的分類效果圖(壓力調(diào)節(jié)器故障)
圖4中的1、2、3、4、5分別與壓力調(diào)節(jié)器的無(wú)故障、左前調(diào)節(jié)器故障、右前調(diào)節(jié)器故障、左后調(diào)節(jié)器故障、右后調(diào)節(jié)器故障5種故障類別相對(duì)應(yīng)。從圖4中可以看出,利用PNN進(jìn)行故障診斷時(shí),PNN網(wǎng)絡(luò)輸出的故障判斷類別和故障的實(shí)際類別相同,診斷誤差為0。
3.2.2 輪速傳感器故障診斷模型的建立
針對(duì)輪速傳感器的故障診斷,將2.5、3、3.5、4、4.5、4.7 s時(shí)所采集的數(shù)據(jù)作為訓(xùn)練樣本。
在BP網(wǎng)絡(luò)訓(xùn)練過(guò)程中,網(wǎng)絡(luò)的構(gòu)建函數(shù)、參數(shù)設(shè)置以及隱含層節(jié)點(diǎn)的設(shè)置范圍與壓力調(diào)節(jié)器相同。表4為隱含層節(jié)點(diǎn)在4~14范圍內(nèi)時(shí),利用BP神經(jīng)網(wǎng)絡(luò)對(duì)輪速傳感器進(jìn)行故障診斷模型的訓(xùn)練結(jié)果。

表4 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練結(jié)果(輪速傳感器故障)
從表4中可以看出,當(dāng)隱含層節(jié)點(diǎn)數(shù)為6時(shí),網(wǎng)絡(luò)訓(xùn)練所得到的的均方根誤差最小,其值為0.014 9,此時(shí)網(wǎng)絡(luò)的平均絕對(duì)誤差為0.055 7,訓(xùn)練時(shí)間為0.686 4 s,迭代次數(shù)為11次,此時(shí)網(wǎng)絡(luò)訓(xùn)練過(guò)程的誤差變化如圖5所示。
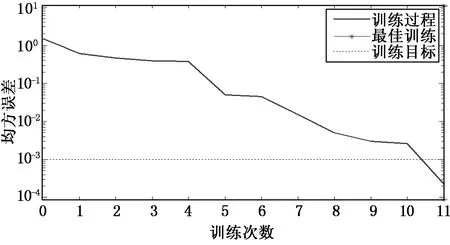
圖5 網(wǎng)絡(luò)訓(xùn)練過(guò)程的誤差變化(輪速傳感器故障)
從圖5中可以看出,當(dāng)訓(xùn)練次數(shù)達(dá)到11步時(shí),達(dá)到了預(yù)設(shè)的訓(xùn)練誤差0.001,網(wǎng)絡(luò)訓(xùn)練收斂。
在利用概率神經(jīng)網(wǎng)絡(luò)對(duì)輪速傳感器進(jìn)行故障診斷時(shí),平滑因子的取值同樣選取從0.1~10,間隔為0.1。訓(xùn)練結(jié)果發(fā)現(xiàn)當(dāng)平滑因子取值為0.1~10時(shí),網(wǎng)絡(luò)訓(xùn)練的平均絕對(duì)誤差都為0,但是當(dāng)平滑因子取值為2.4時(shí),訓(xùn)練時(shí)間最短為0.046 8 s,所以選擇平滑因子的取值為2.4。和BP神經(jīng)網(wǎng)絡(luò)相比,BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練時(shí)間是PNN的14.7倍,PNN訓(xùn)練后訓(xùn)練數(shù)據(jù)的分類效果如圖6所示。
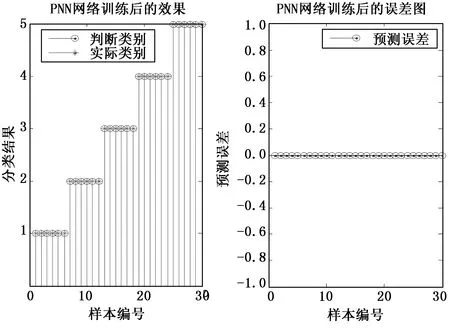
圖6 PNN訓(xùn)練后的訓(xùn)練數(shù)據(jù)分類效果(輪速傳感器故障)
圖6中的1、2、3、4、5分別與輪速傳感器的無(wú)故障、左前輪傳感器故障、右前輪傳感器故障、左后輪傳感器故障、右后輪傳感器故障5種故障類別相對(duì)應(yīng)。從圖6中可以看出,針對(duì)輪速傳感器的故障診斷,利用PNN進(jìn)行故障診斷時(shí),PNN網(wǎng)絡(luò)輸出的判斷類別和故障的實(shí)際類別相同,診斷誤差也為0。
對(duì)比BP神經(jīng)網(wǎng)絡(luò)發(fā)現(xiàn),概率神經(jīng)網(wǎng)絡(luò)在壓力調(diào)節(jié)器和傳感器進(jìn)行故障診斷時(shí),模型的訓(xùn)練時(shí)間和訓(xùn)練精度都優(yōu)于BP神經(jīng)網(wǎng)絡(luò)。
4 結(jié)果與分析
4.1 壓力調(diào)節(jié)器的故障類別預(yù)測(cè)
將壓力調(diào)節(jié)器故障在1.5 s時(shí)采集的樣本數(shù)據(jù)作為測(cè)試樣本,如表5所示。利用建好的基于PNN的壓力調(diào)節(jié)器故障診斷模型對(duì)測(cè)試樣本進(jìn)行診斷(文中主要對(duì)測(cè)試樣本的實(shí)際故障類別順序?yàn)?-2-3-4-5和1-5-3-2-4時(shí)進(jìn)行故障診斷),診斷結(jié)果如圖7和圖8所示。

表5 壓力調(diào)節(jié)器故障的測(cè)試樣本

表6 傳感器故障的測(cè)試樣本

圖7 PNN網(wǎng)絡(luò)的預(yù)測(cè)效果(壓力調(diào)節(jié)器故障的實(shí)際類別順序?yàn)?-2-3-4-5)
結(jié)合7和圖8可以看出,所建立的基于PNN的壓力調(diào)節(jié)器故障診斷,無(wú)論測(cè)試順序發(fā)生什么變化,PNN都能準(zhǔn)確地進(jìn)行故障診斷。
4.2 輪速傳感器故障類別預(yù)測(cè)
將輪速傳感器故障在2 s時(shí)采集的樣本數(shù)據(jù)作為測(cè)試樣本,如表6所示。利用建好的基于PNN的輪速傳感器故障診斷模型對(duì)測(cè)試樣本進(jìn)行診斷(文中主要對(duì)測(cè)試樣本的實(shí)際故障類別順序?yàn)?-2-3-4-5和5-1-4-2-3時(shí)進(jìn)行診斷),診斷結(jié)果如圖9和圖10所示。

圖9 PNN網(wǎng)絡(luò)預(yù)測(cè)效果(輪速傳感器故障的實(shí)際類別順序?yàn)?-2-3-4-5)

圖10 PNN網(wǎng)絡(luò)預(yù)測(cè)效果(輪速傳感器故障的實(shí)際類別順序?yàn)?-1-4-2-3)
結(jié)合圖9和圖10可以看出,無(wú)論故障診斷的測(cè)試順序發(fā)生什么變化,所建立的基于PNN的輪速傳感器故障診斷模型,都能準(zhǔn)確地進(jìn)行故障診斷。
5 結(jié)論
本文主要針對(duì)ABS系統(tǒng)的壓力調(diào)節(jié)器和輪速傳感器進(jìn)行故障診斷。
1)利用相同的訓(xùn)練樣本對(duì)PNN和BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練。基于BP神經(jīng)網(wǎng)絡(luò)的壓力調(diào)節(jié)器和輪速傳感器的故障診斷模型的訓(xùn)練時(shí)間分別是基于概率神經(jīng)網(wǎng)絡(luò)的8.8和14.7倍。另外,從訓(xùn)練誤差上來(lái)說(shuō),基于BP神經(jīng)網(wǎng)絡(luò)的壓力調(diào)節(jié)器和輪速傳感器的故障診斷模型訓(xùn)練的均方根誤差分別為0.012 4和0.014 9,而基于PNN的壓力調(diào)節(jié)器和輪速傳感器的故障診斷模型的訓(xùn)練誤差都為0。
2)利用測(cè)試樣本集對(duì)基于PNN的壓力調(diào)節(jié)器和輪速傳感器模型進(jìn)行檢測(cè),結(jié)果表明,無(wú)論壓力調(diào)節(jié)器和輪速傳感器實(shí)際故障類別順序發(fā)生什么變化,基于PNN的故障診斷模型都能夠準(zhǔn)確的進(jìn)行故障識(shí)別。
猜你喜歡
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
北京航空航天大學(xué)學(xué)報(bào)(2016年6期)2016-11-16 01:50:43
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21