原子時系統主備鐘同步技術研究
2020-04-29 05:13:56陳學軍
宇航計測技術 2020年1期
關鍵詞:系統
楊 帆 陳學軍 張 然
(1.北京無線電計量測試研究所,北京 100039;2.中國西安衛(wèi)星測控中心,陜西西安 710000)
1 引 言
隨著時間頻率技術的高速發(fā)展,各行業(yè)對時間頻率的精度要求越來越高,建立與保持原子時系統也逐漸成為各時間保持與應用單位的基礎工作。眾所周知,原子時系統的實時物理信號是由主鐘系統產生的,主鐘系統的運行狀態(tài)直接關系到整個守時系統的性能。為了提高系統的可靠性,保證原子時系統實時物理信號的連續(xù)穩(wěn)定輸出,為主鐘系統建立一套備份鐘系統成為重要舉措之一。正常情況下,備份鐘系統與主鐘系統均持續(xù)運行;當主鐘系統出現異常,備份鐘系統代替主鐘系統開始工作。為了保證主鐘系統向備份鐘系統切換時的時間連續(xù)性,主備鐘系統之間的時間同步是其中的關鍵[1]。
本文介紹了原子時主備鐘同步系統的設計,開展主備同步技術研究,結果表明通過主備同步技術,可保持主備信號時間頻率的實時一致性。
2 主備鐘同步系統設計
原子時系統的主備鐘同步系統結構如圖1所示。
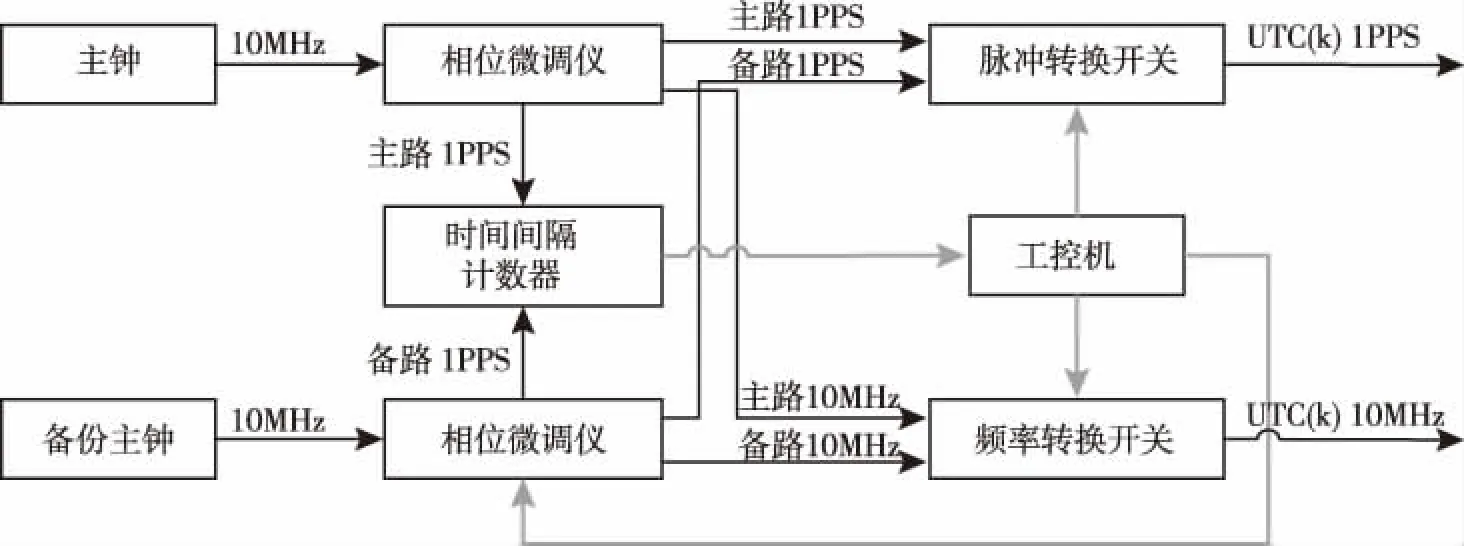
圖1 主備鐘同步系統結構圖Fig.1 Structure diagram of the master-backup consistency system
在原子時系統中選出兩臺性能優(yōu)良的原子鐘分別作為系統的主鐘和備份主鐘。主鐘的10MHz經1臺相位微調儀后輸出主路信號,同時,備份主鐘的10MHz經1臺相位微調儀后產生備路信號。時間間隔計數器實時采集主路1PPS和備路1PPS之間的時差,主備同步算法利用該時差對備份主鐘信號進行調整。主路1PPS和備路1PPS,以及主路10MHz和備路10MHz分別接入脈沖轉換開關和頻率轉換開關。主備路均正常運行時,轉換開關選通主路信號作為UTC(k)輸出;主路出現異常后,工控機控制轉換開關,使其選通備路信號作為UTC(k)輸出。除了轉換開關的切換速度,主備路信號的實時同步是保證主路切換到備路時UTC(k)連續(xù)穩(wěn)定的關鍵。
3 主備路信號實時同步技術
主備路信號實時同步包含兩個關鍵技術,分別是備份主鐘的實時調整技術和主備路原子鐘性能實時監(jiān)測技術。
3.1 備份主鐘實時調整技術
對備份主鐘的調整分為兩步[2],分別是初始脈沖同步和實時頻率微調,備鐘調整流程如圖2所示。
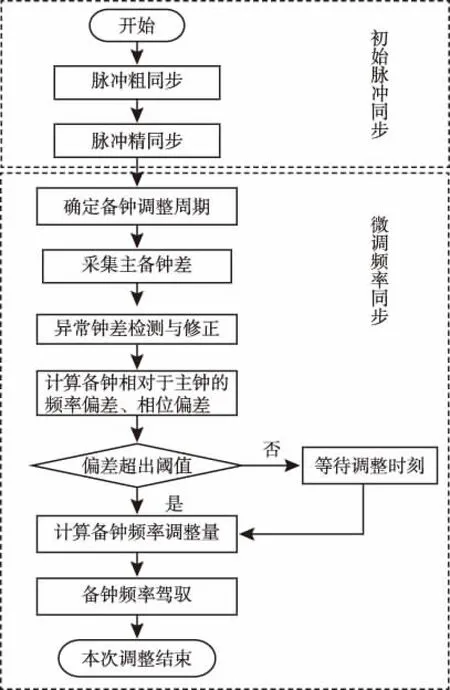
圖2 備鐘調整流程圖Fig.2 Flow chart of backup clock adjustment
3.1.1初始脈沖同步
系統運行伊始,備份主鐘按照自己的頻率特性自由運行,其脈沖和頻率輸出與主鐘相互獨立。初始脈沖同步是利用相位微調器的PPS同步功能,將主備鐘輸出的脈沖信號粗同步到一個較小的范圍內(該范圍由相位微調器的指標決定),通常脈沖粗同步后主備時差仍在百納秒量級。然后通過相位微調儀對備份鐘發(fā)送相位調整指令,使主備時差調整至納秒量級,即相位精同步。初始脈沖同步動作只在系統運行初始執(zhí)行一次,要保持主備鐘的持續(xù)同步需要通過第二步微調頻率同步來實現。
3.1.2實時頻率微調
主備鐘同步系統開始運行之后,為了保證備份主鐘與主鐘的實時同步,需要根據主備鐘差實時計算主備時差和頻差,并對備份主鐘頻率進行微調。
本主備同步系統中,設置時間間隔計數器的采樣周期為1s,工控機通過串口實時讀取計數器采集的主備鐘差,經主備同步算法處理后得到備份主鐘的頻率微調量。主備同步算法流程如圖3所示。
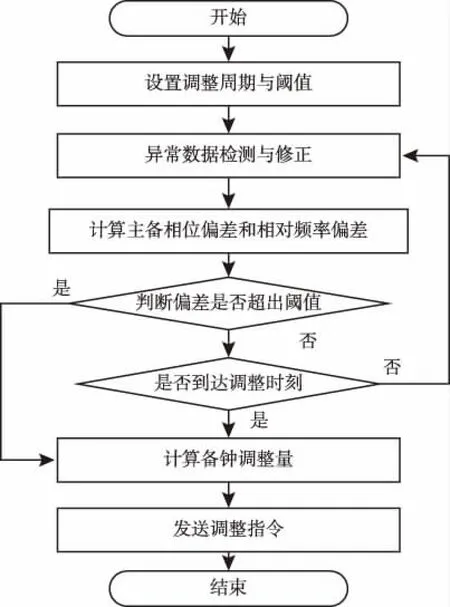
圖3 主備同步算法流程圖Fig.3 Flow chart of master-backup consistency algorithm
主備同步算法對采集到的本周期內鐘差數據進行異常值檢測與修正[3],并實時計算備份鐘相對于主鐘的頻率偏差和相位偏差。若偏差超出閾值,無論是否到達調整時刻,都應立即計算備份鐘的頻率調整量,并利用相位微調器對備份鐘的頻率進行駕馭。若偏差在閾值范圍以內,需判斷是否到達調整時刻,再根據判斷結果采取不同的操作:調整時刻未到,則繼續(xù)進行鐘差預處理和判斷是否超出閾值;調整時刻已到,則計算備份主鐘調整量并執(zhí)行調整動作。至此,一個調整周期結束,進入下一個調整周期,重復以上數據預處理、判斷、計算與調整操作。
實現主備鐘的實時同步,最主要的兩點是調整周期的選擇和調整量的計算。一般來說,調整周期越短,備鐘對主鐘的跟蹤效果越好;調整量越小,對備鐘原有頻率特性的影響越小。
調整周期需要根據備份鐘實際運行狀態(tài)決定[4]。備鐘頻率調整量的算法[5,6]如下。
1)設置相位偏差閾值Mp和頻率偏差閾值Mf;
2)計算當前備份主鐘相對于主鐘的相位偏差p,若p超出閾值Mp,則通過相位偏移量得到的一個頻率調整分量offset1=-(p-Mp)/T(T為調整周期);
3)對異常值修正后的主備鐘差進行最小二乘線性擬合,得到備份鐘的頻率偏移量f,若f超出閾值Mf,以其相反數作為一個頻率調整分量,記為offset2=-f;
4)計算備份鐘的頻率總調整量offset=offset1+offset2。
3.2 主備路原子鐘性能實時監(jiān)測技術
原子鐘作為一種精細復雜的設備,其運行狀態(tài)會受到各種各樣內因外因的影響,而主鐘的運行狀態(tài)又在整個原子時系統中占據著至關重要的地位。研究主備同步技術的目的就是在主鐘出現異常的情況下,能及時利用備份主鐘替代主鐘,使得系統能夠穩(wěn)定無間斷地運行,因此主備鐘狀態(tài)監(jiān)測也是主備同步的關鍵[6]。
3.2.1原子鐘性能表征
原子鐘的性能一般通過準確度、穩(wěn)定度和漂移率來表征[7]。
準確度是指頻率的實際值相對標稱值(給定值)的偏離程度。在原子時系統中,該標稱值通常為綜合時間尺度TA。
原子鐘內部,引起頻率隨機起伏的主要有五種獨立噪聲,盡管噪聲的幅度和相位準確值不可預見,但預見噪聲的隨機程度是有可能的,定量地描述這種隨機變化程度的量稱為頻率穩(wěn)定度。同樣的,穩(wěn)定度也是一個相對概念,原子時系統中,通常以原子鐘相對于綜合時間尺度TA的穩(wěn)定度來表征該鐘的穩(wěn)定度性能。
頻率漂移率一般是指頻率在單位時間內的單方向變化量,它表征原子鐘內部振蕩器在連續(xù)運行過程中頻率值隨時間的有規(guī)律變化。在原子時系統中,頻率漂移率由原子鐘與TA的時差數據計算得到。
3.2.2原子鐘異常狀態(tài)的判定
在主備同步系統中,實時計算主鐘和備份鐘的準確度、穩(wěn)定度和漂移率,并將計算結果與監(jiān)測閾值進行比較(閾值的選擇由正常情況下鐘的歷史運行狀態(tài)決定)。當主鐘的任何一個性能表征量異常,則給出告警信息,操作人員需對其進行進一步異常排查;若判定其無法繼續(xù)擔任主鐘角色,則進行主備切換操作。若備份鐘的性能出現異常,則需要從鐘組中重新選擇一臺鐘作為備份主鐘,保證主備同步系統的持續(xù)運行。
主備鐘狀態(tài)監(jiān)測流程如圖4所示。
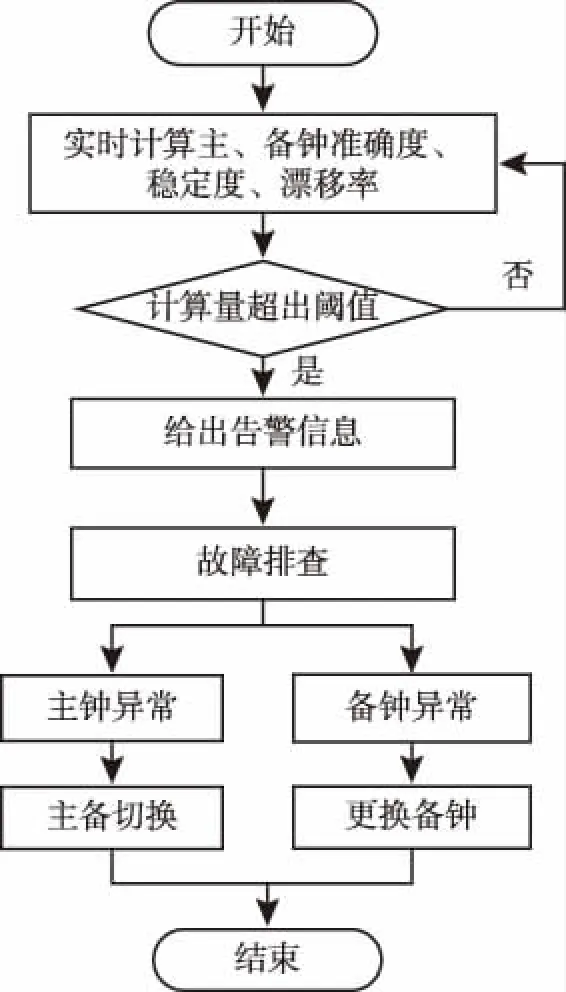
圖4 主備鐘狀態(tài)監(jiān)測流程圖Fig.4 State monitoring process of master-backup clock
4 實驗結果分析
根據所述原理搭建原子時主備同步系統,并利用自行開發(fā)的主備同步控制軟件對該系統進行調整控制。
系統運行伊始,以主路1PPS為參考,利用備路相位微調儀的PPS同步功能,將主備路信號進行粗同步;此時,并未對備份主鐘的頻率作調整,仍以其自身頻率特性運行,粗同步后系統運行1h,運行結果如圖5所示。
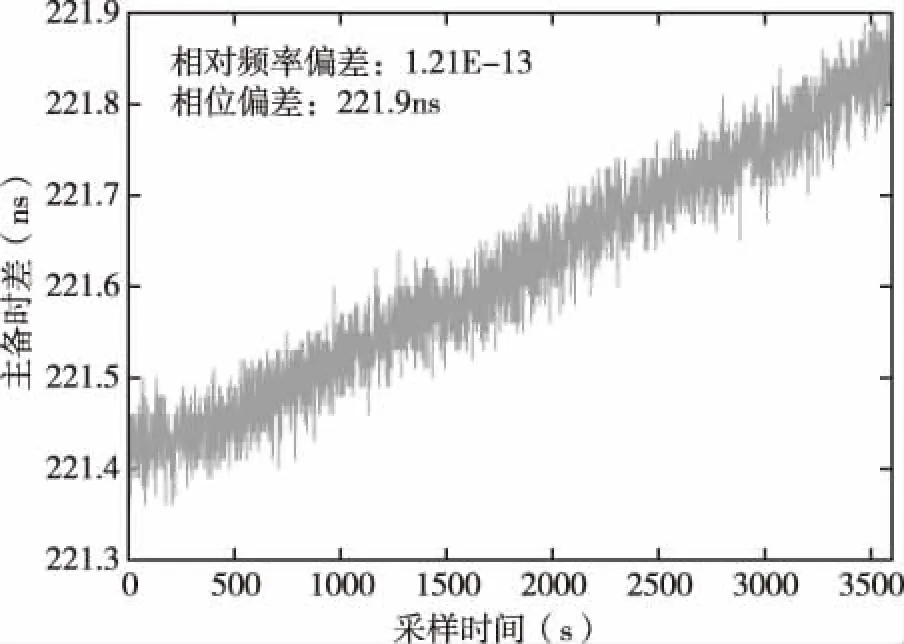
圖5 初始運行時的主備鐘差波形圖Fig.5 Clock differences of master and backup clock during initial operation
利用圖5中1h的主備鐘差計算備份主鐘相對于主鐘的頻率偏差和相位偏差,分別為1.21E-13和221.9ns。然后對備份主鐘進行相位精同步,將主備相位調整至0ns左右,此時,仍未對備份主鐘的頻率進行調整,該過程對應圖6中的T1周期。系統在T1周期運行1h后,利用運行結果計算備份主鐘的頻率微調量,系統進入頻率微調階段,對應圖6中的T2周期,在該周期運行1h,主備相對頻率偏差已提高1個量級。根據T2的運行結果再次計算備份主鐘相對于主鐘的頻率偏差和相位偏差,并再次對備份主鐘進行調整。經過兩輪調整,主備運行狀態(tài)趨于穩(wěn)定。圖6中的T3周期和T4周期,即運行穩(wěn)定后的狀態(tài),可見,主備鐘差保持在(0.25~0.35)ns,主備頻差保持在2E-15以內。
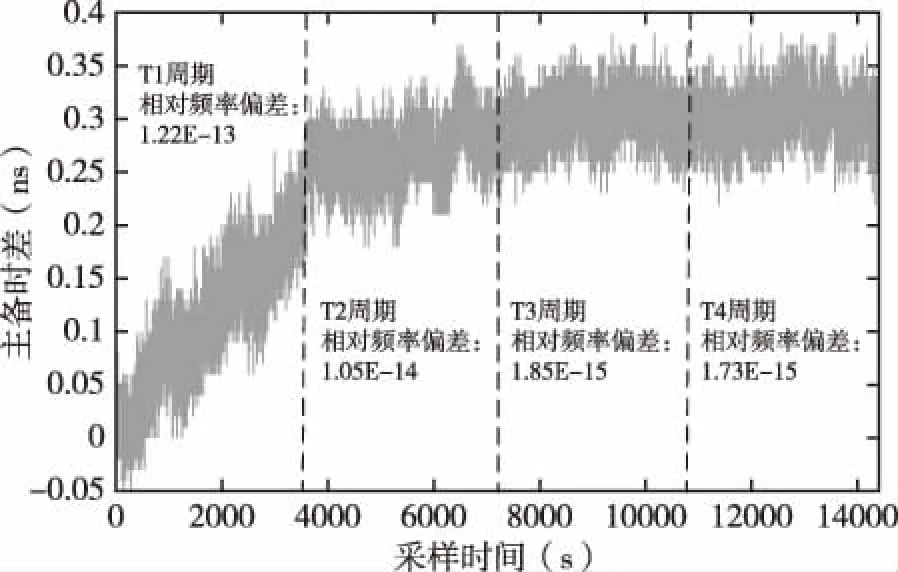
圖6 調整至穩(wěn)定運行過程中的主備鐘差波形圖Fig.6 Clock differences of master and backup clock during adjusting to stable operation
5 結束語
本文設計了原子時系統中的主鐘和備份主鐘同步系統,并對主備同步技術進行了深入研究,通過搭建實驗系統和開發(fā)主備同步軟件,使主備路的相對頻率頻差和相位偏差保持在很小的范圍內。為提高原子時系統的可靠性、穩(wěn)定性,實現原子時系統的主備路無縫切換提供重要支撐。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32