基于ECE法規及I線的純電動汽車制動能量回收策略研究*
2020-04-29 06:51:52李勝琴湯亞平
武漢理工大學學報(交通科學與工程版) 2020年1期
李勝琴 湯亞平
(東北林業大學交通學院 哈爾濱 150040)
0 引 言
目前,在新能源汽車推廣的熱潮中,純電動汽車以其排放、結構、技術方面的優勢備受關注[1].然而,純電動汽車的續航里程問題一直得不到有效的解決,成為其向市場推廣的阻礙[2].純電動汽車依靠電機驅動車輪運轉,同時可以在車輛制動的時候,變成發電機工作參與制動,依靠傳動系統提供汽車減速所需的阻力并將汽車的動能轉化為電能存儲在儲能元件中[3].對制動過程中的能量進行回收對于提高整車能量利用效率,增加續航里程有著重要的意義.
純電動汽車制動系統由傳統的摩擦制動系統和電機的再生制動系統組成,如何分配前后輪的摩擦制動力和電機再生制動力的大小,在保證制動性能穩定的基礎之上,盡可能回收制動能量是制動能量回收策略的主要研究內容[4].Yeo等[5]基于I曲線制定前、后制動力分配策略,但是該策略增大了后輪制動力,從而減小了電機制動力,降低了能量回收率.Gao等[6]針對制動穩定性和制動能量回饋效率這兩個不同的優化目標,基于神經網絡設計了兩種制動能量回收前后輪制動力分配策略,并對所提出的控制策略的能量回收效率進行了評價.高會恩等[7]以車速和制動強度對制動模式進行劃分,并基于電動伺服系統提出前饋加三閉環反饋的輪缸壓力控制算法,對電液制動力進行協調分配,仿真和整車平臺實驗表明其壓力控制算法和制動能量回收策略能的有效性.郭洪強等[8]提出了一種實時最優制動力控制策略,通過對電池SOC、制動強度等數據的離線優化來保障汽車行駛過程中的穩定性和制動能量回收率.陳贊等[9]基于理想制動力分配曲線,采用模糊控制算法對機械制動力和電機制動力進行分配,盡可能的發揮電機的再生制動特性,可是未考慮到電池充放電功率的限制.
基于汽車理想制動力分配曲線,結合I,f線組,同時考慮ECE法規的限制,針對某款前置前驅純電動汽車,設計再生制動和摩擦制動的制動力分配及制動能量回收策略,利用Simulink和Cruise軟件,建立聯合仿真模型,在不同強度制動工況和NEDC循環工況下對該控制策略的有效性進行驗證.
1 制動時受力分析
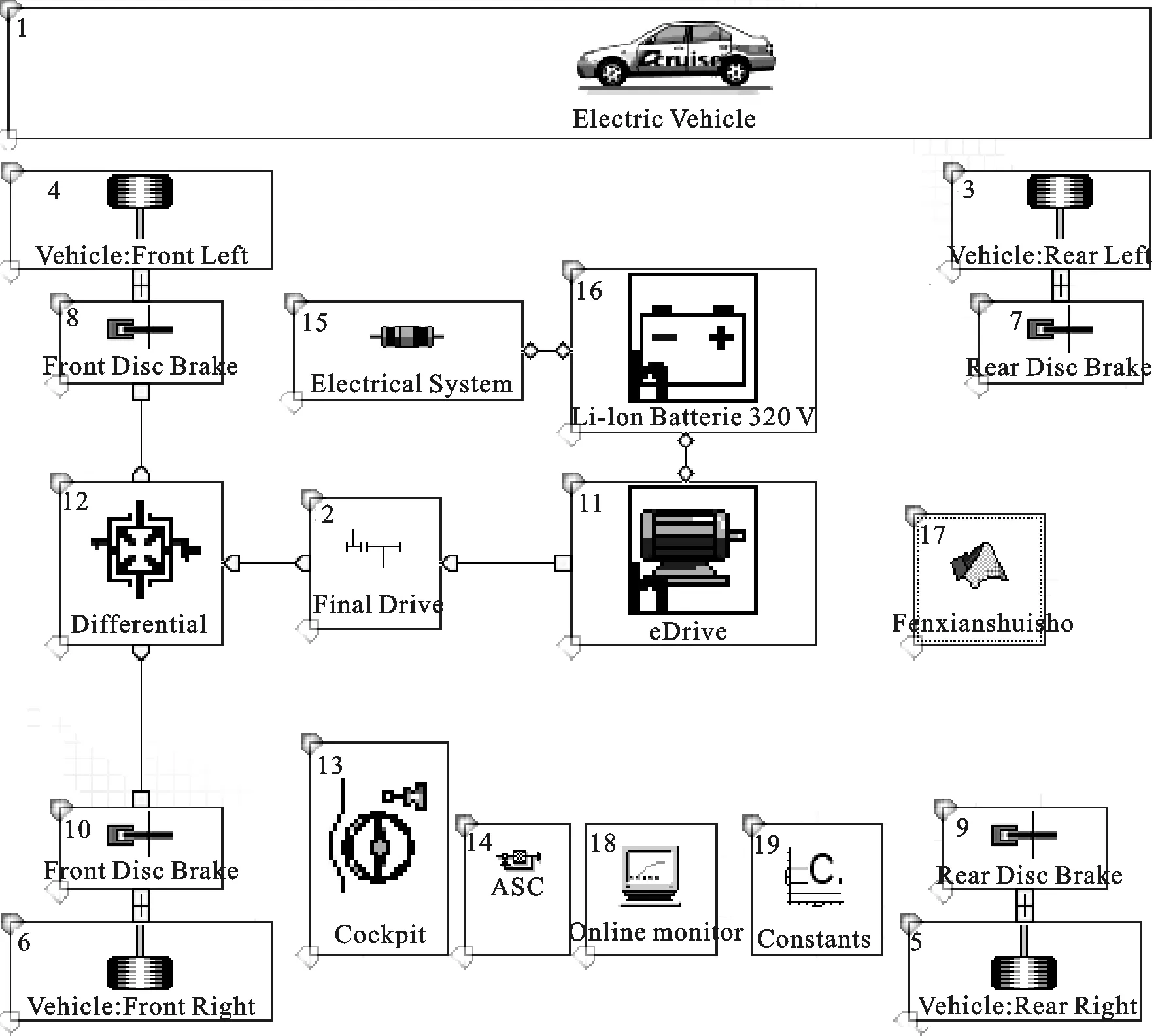
選取車型的布置形式見圖1,整車、電機、電池的相關參數見表1.
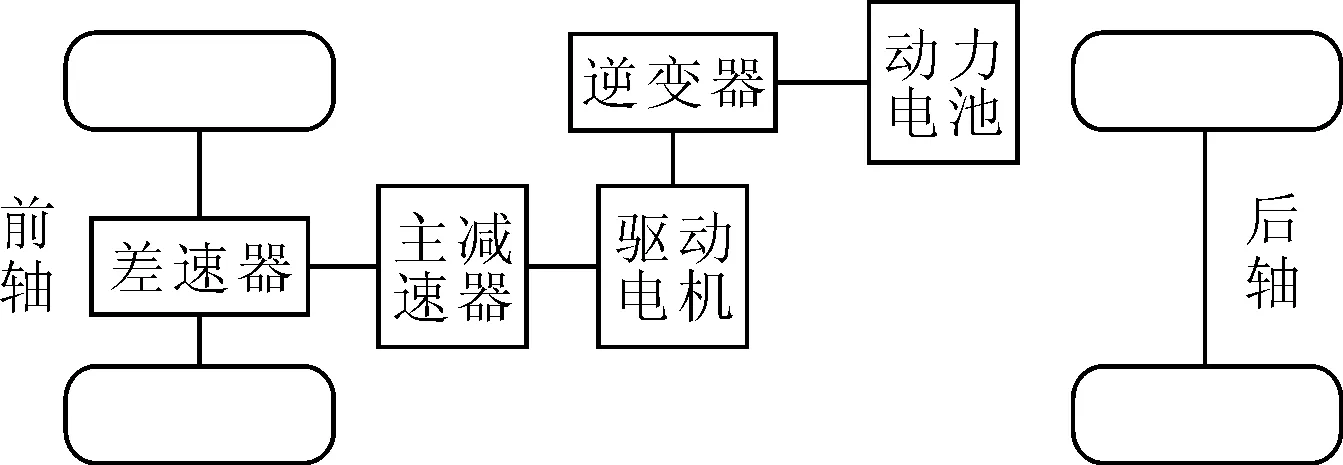
圖1 純電動汽車的布置形式
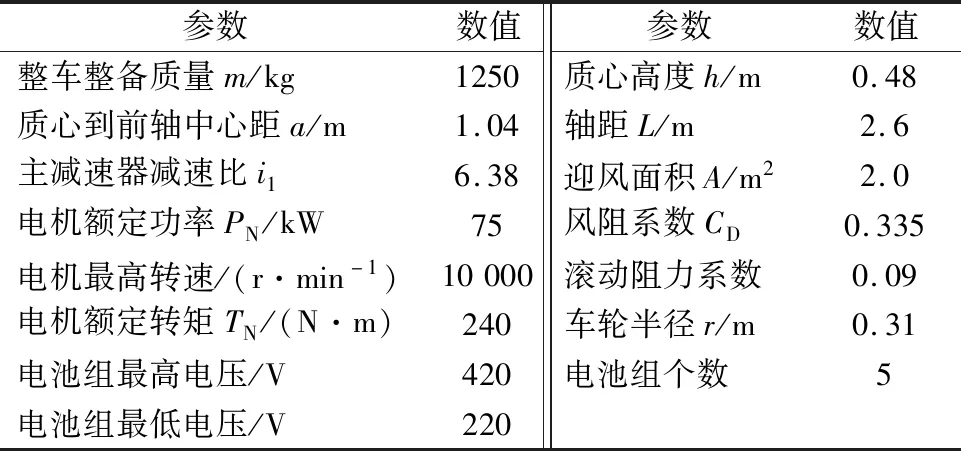
表1 整車及電機電池參數表
1.1 前后軸制動力分配
根據文獻[10],汽車在制動過程中按照前后輪抱死順序的三種情況,當前后輪同時抱死時,前后軸制動力為式(1);當前輪比后輪先抱死拖滑,前后軸制動力為式(2);當后輪比先前輪抱死拖滑,前后軸制動力為式(3).
(1)
(2)
(3)
式中:Fbf為前輪地面制動力,N;Fbr為后輪地面制動力,N;G為車輛重力,N;b為質心到后軸中心距的距離,m;φ為地面附著系數;a為質心到前軸的距離.
另外,根據ECE-R13法規的相關規定,當附著系數φ在0.2~0.8時,制動強度z應滿足關系式z≥0.1+0.85(φ-0.2),φr應在φf的下方;z在0.3~0.4時,φr≤z+0.05,可以得到車輛前后軸制動力為式(4).根據式(1)和(4)做出理想制動力分配曲線和ECE法規曲線,同時對式(2)~(3)代入車輛參數并對φ取不同的路面附著系數值,得出車輛在不同附著系數路面的f,r線組,得到的汽車前后軸制動力分配特性見圖2.
(4)
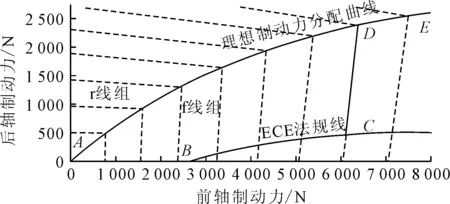
圖2 前后軸制動力分配特性圖
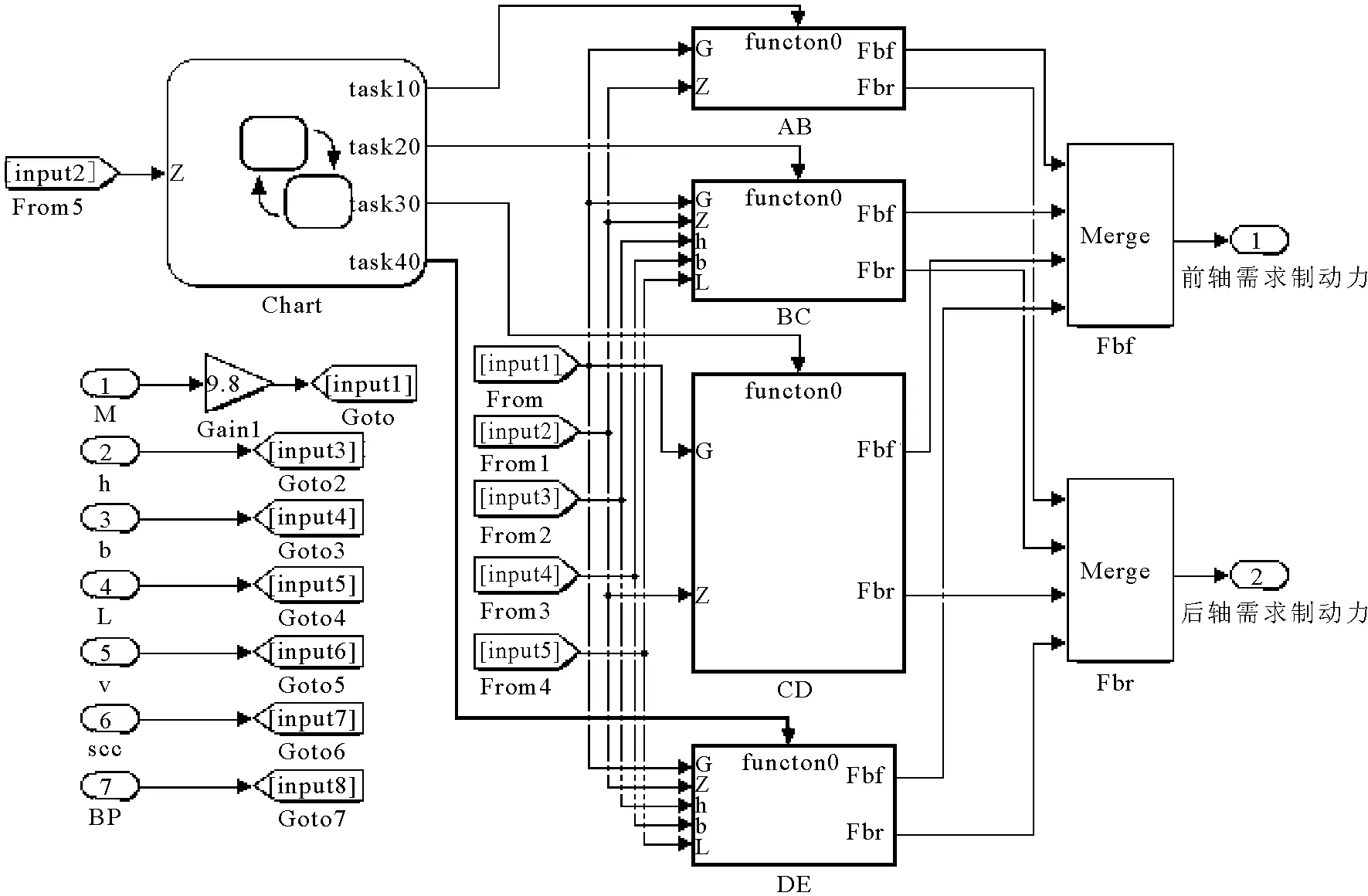
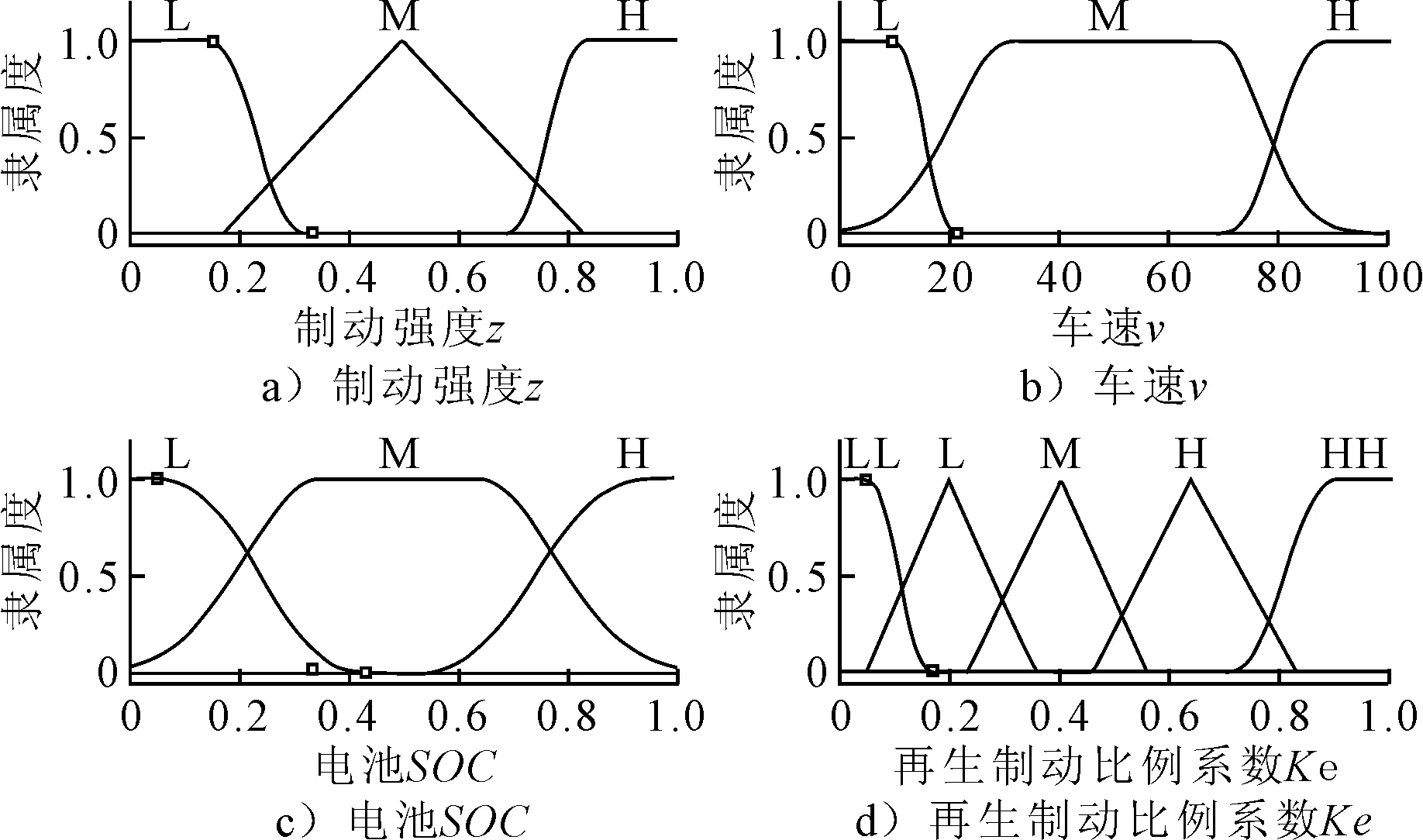
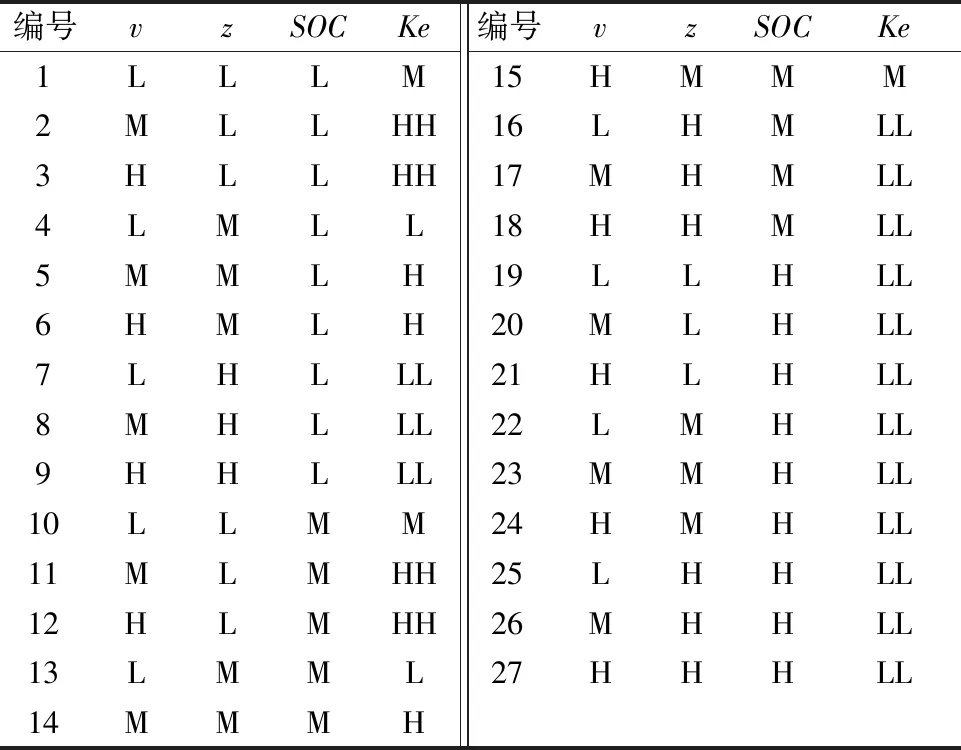
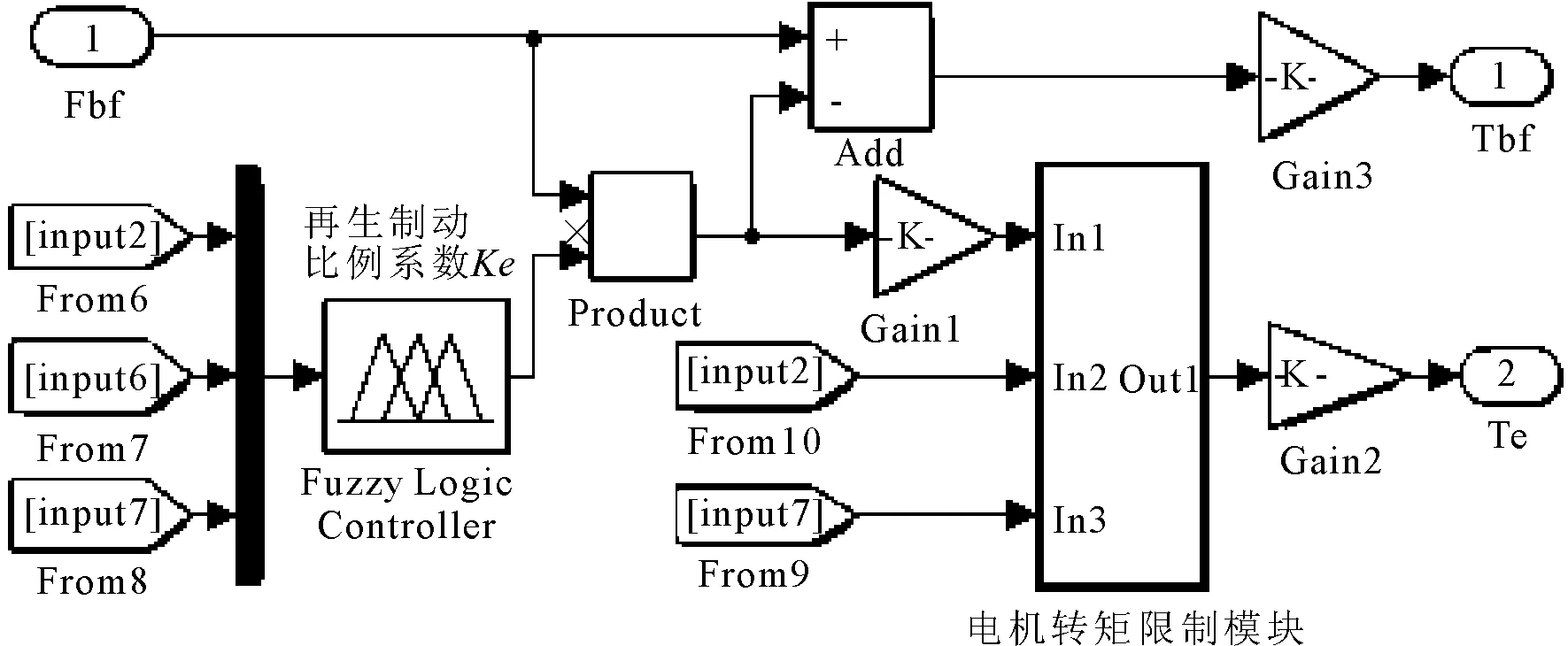
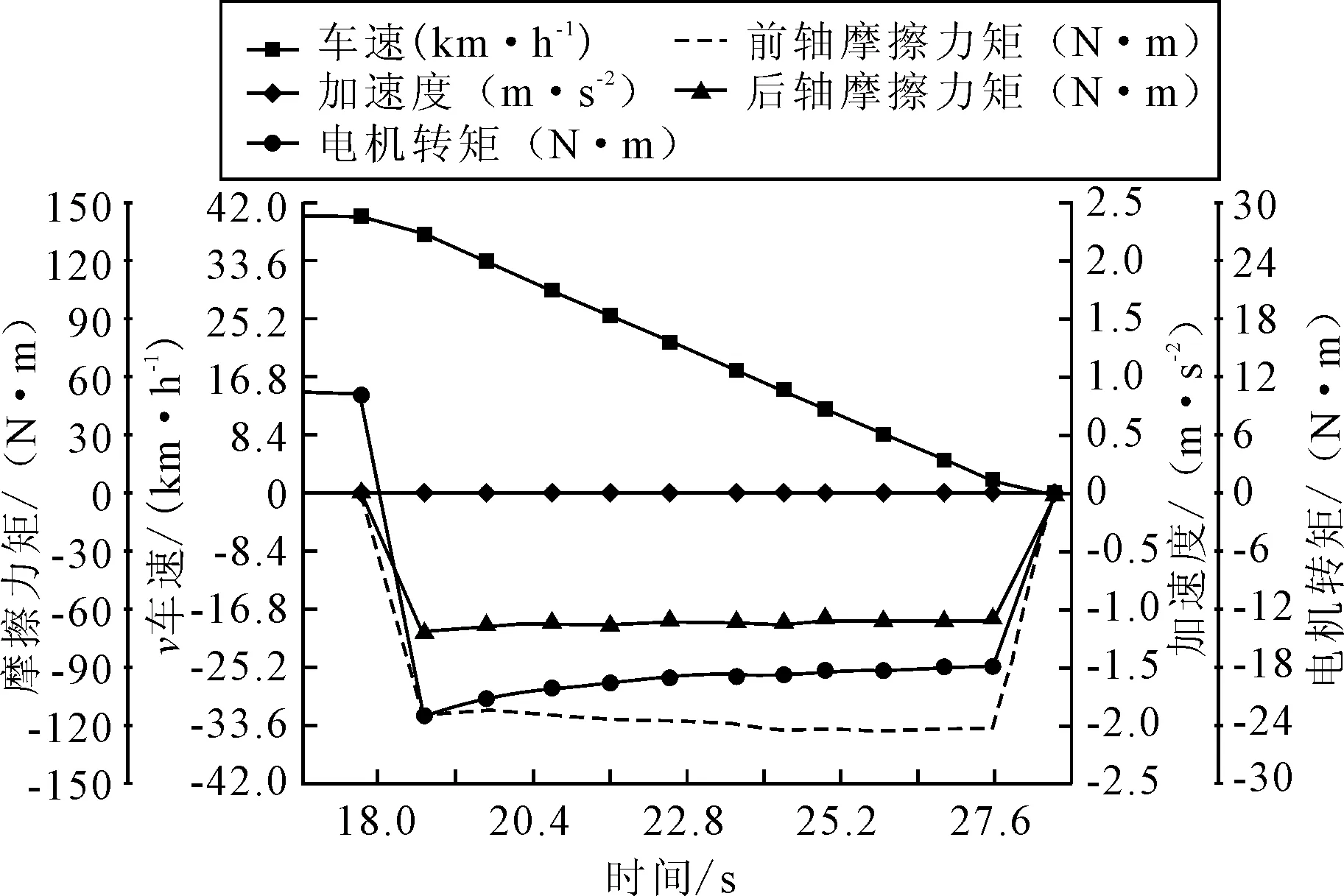
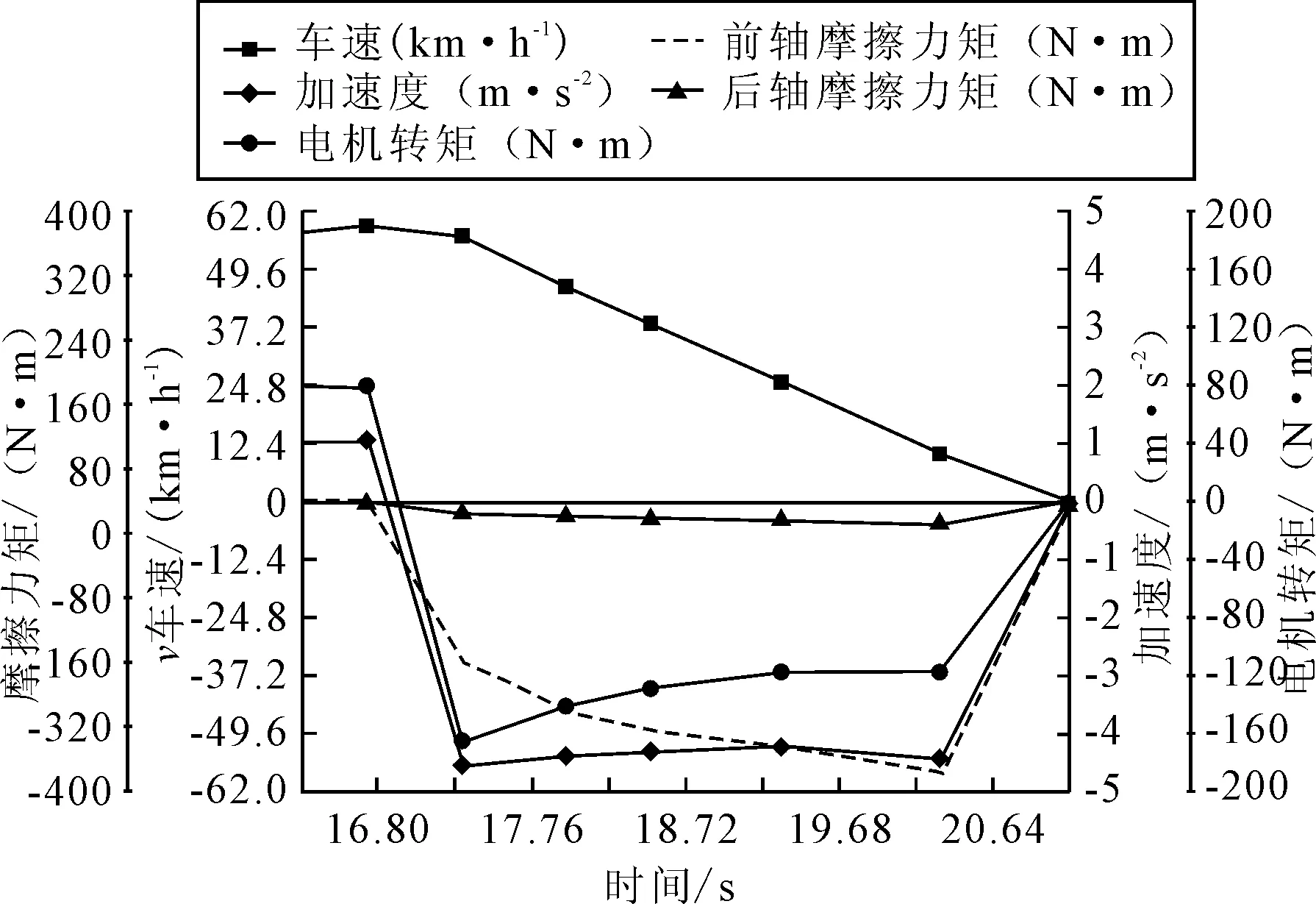
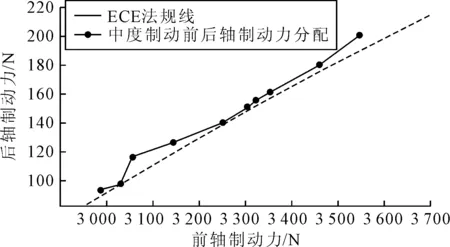
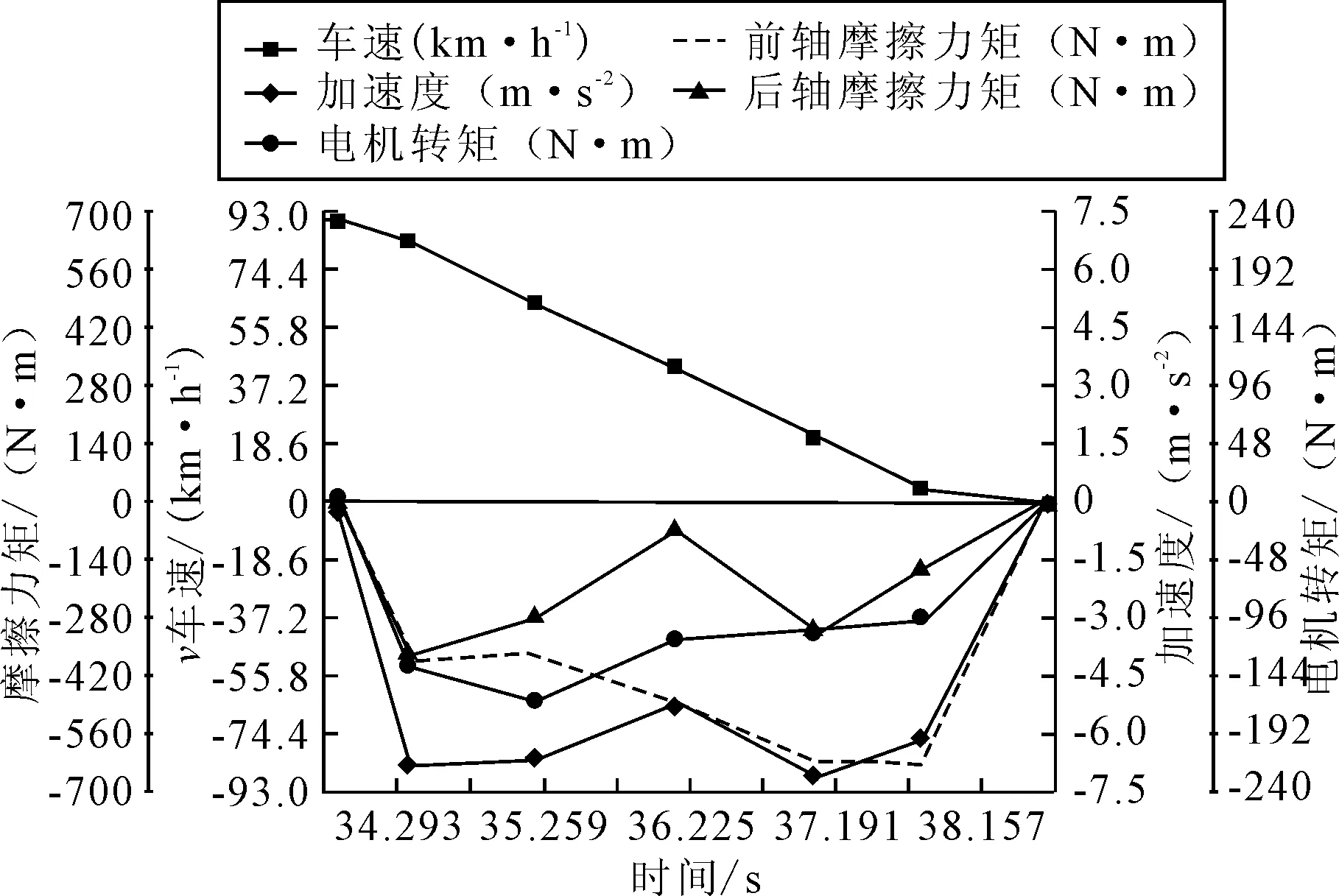
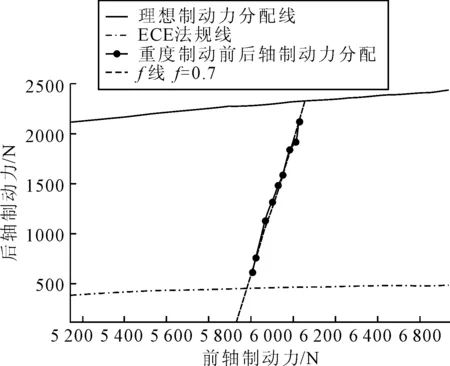
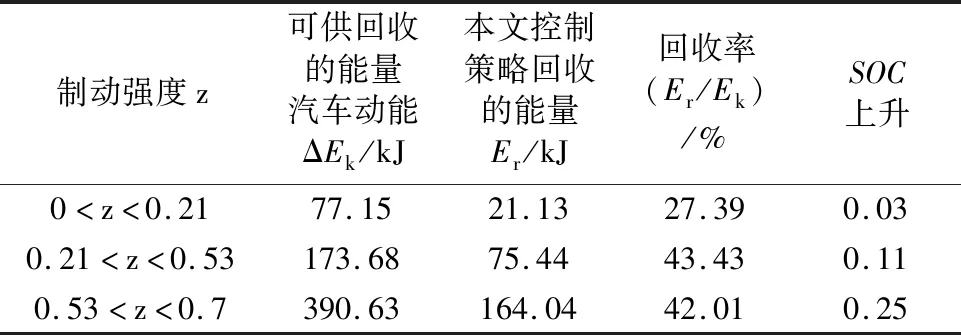
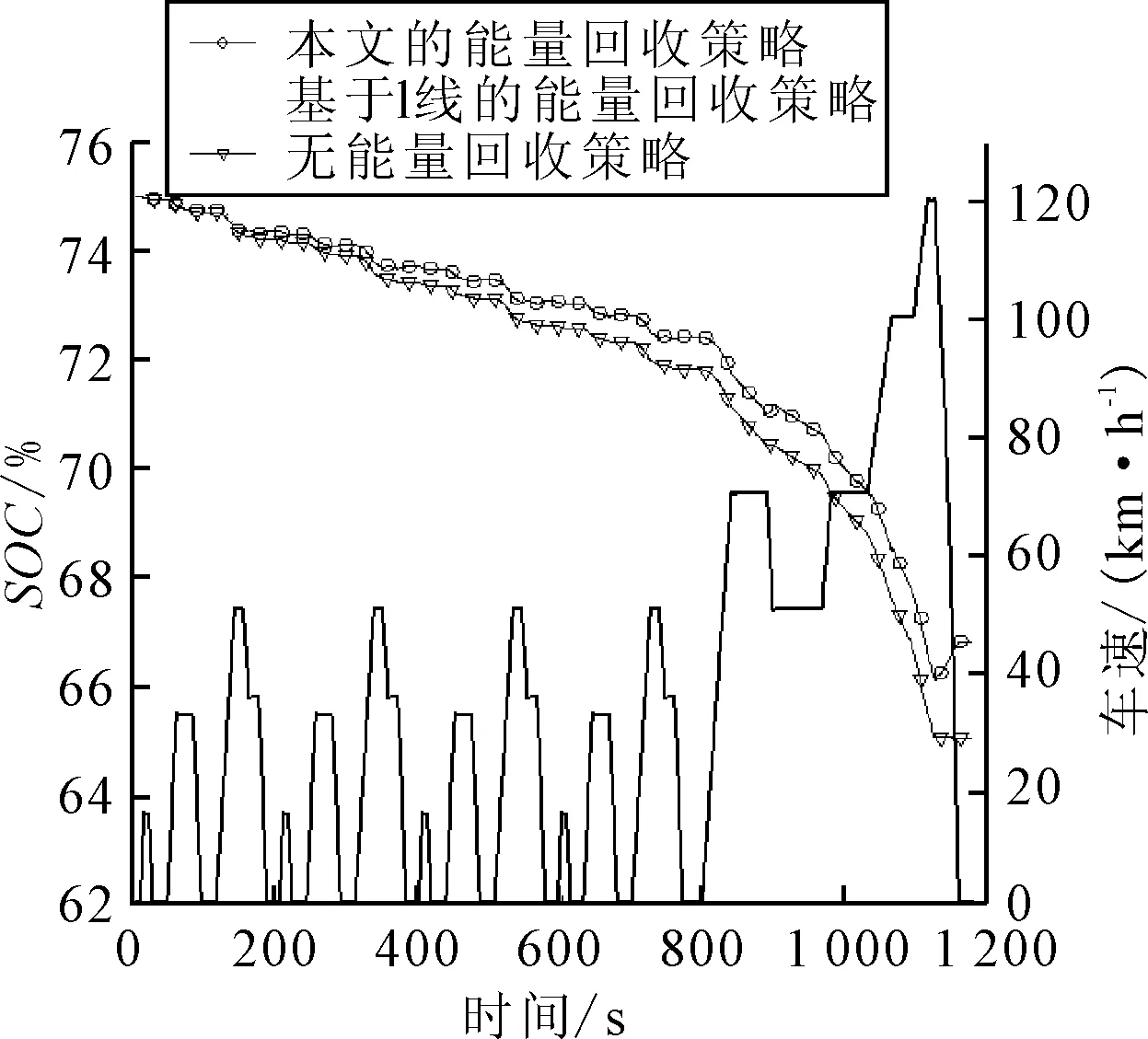
由圖2可知,B點的坐標為(2 680,0),對應制動強度0.21.當制動強度為0 (5) 以常見的混凝土和瀝青路面的附著系數0.7為基準,可以得出此時的f線與ECE法規線的交點C(6122,467),對應制動強度0.53.當制動強度為0.21 (6) 當制動強度為0.53 (7) 式中:KCD為線段CD的斜率;Dx為D點的橫坐標;Dy為D點的縱坐標. 當制動強度大于0.7,此時屬于緊急制動,為了保障制動的安全性,此時前后軸的制動力應該盡量由更可靠的摩擦制動提供,按照DE段理想制動力分配I線進行分配,以縮短制動距離.此時前后輪制動力為 (8) 電機有著四象限工作特性,能夠在制動的時候轉化為發電機工作,發電機的特性曲線近似于電動機的特性曲線,可以得出電機的再生制動力的計算模型為 (9) 式中:Fe為電機提供的再生制動力,N;Te為電機提供的再生制動力矩,N·m;ηT為傳動系統效率;nN為電機額定轉速,r/min;n為電機轉速,r/min. 為了防止發電功率過大對電池造成損傷,需要對電機的輸出的轉矩進行限制.根據文獻[11]可知,電機的發電功率為式(10),電池的充電功率為式(11),由此可得電機的修正轉矩為式(12). Pgen=FerωηTηgen/i1 (10) Pchg=(Eb-IchgRb)Ichg (11) (12) 式中:Pgen為電機發電功率,kW;ω為電機角速度,rad/s;ηgen為電機發電效率;Pchg為電池充電功率,kW;Eb為電池電壓,V;Rb為電池內阻,Ω;Ichg為充電電流,A;ηchg為充電效率;Td為電機的修正轉矩,N·m. 不同的制動意圖所要求的制動性能不同,前后軸分配的制動力也不一樣,根據文獻[12],由于制動壓力與制動踏板行程近似成線性關系,以制動踏板行程百分比作為制動強度.根據式(5)~(8),利用Simulink搭建的前后軸制動力分配模型見圖3. 圖3 前后軸制動力分配模型 根據上文的分析可知,電機和電池的工作特性是影響制動能量回收的關鍵,另外還有制動強度,選取電池的SOC信號,車速信號v和制動強度z作為輸入,采用模糊控制的方式,模糊控制的原理見圖4,控制器采用mamdani型,以電機的再生制動力占前軸制動力的比例系數Ke作為輸出,然后再利用電池的充電功率特性對電機的輸出轉矩進行修正.其中,制動強度z的模糊子集為{低(L)、中(M)、高(H)},論域為[0,1];車速v模糊子集為{低(L)、中(M)、高(H)},論域為[0,100];電池SOC模糊子集為{低(L)、中(M)、高(H)},論域為[0,1];再生制動比例系數Ke的模糊子集為{很低(LL)、低(L)、中(M)、高(H)、很高(HH)},論域為[0,1];制動強度z、車速v、電池SOC、再生制動比例系數Ke的隸屬度函數見圖5.根據大量的仿真實驗和理論分析,制定的模糊控制規則見表2,前軸制動力的分配模型見圖6. 圖4 模糊控制原理圖 圖5 隸屬度函數 表2 再生制動比例Ke模糊規則表 最后利用編譯工具將整個Simulink模型生成dll文件導入到本文選定車型的Cruise仿真模型中,完成聯合仿真系統的建模,見圖7. 圖6 前軸制動力分配模型 圖7 cruise仿真模型 根據上文制動力分配策略,選擇在路面附著系數為0.8的路面對聯合仿真模型進行輕度制動、中度制動和重度制動工況的仿真分析. 3.1.1輕度制動工況 輕度制動工況的條件設定見圖8,初始速度為40 km/h,設定制動強度為1.1 m/s2,制動時間10 s,初始SOC為74.78%. 圖8 輕度制動工況制動力特性 對車輛制動過程中前后軸摩擦力矩和電機輸出轉矩進行記錄,得到輕度制動工況下制動力特性.由于該工況制動強度小于0.21,制動力全部由前軸提供,摩擦制動和再生制動共同作用,后軸不參與制動過程,符合AB段的制動力分配規則. 3.1.2中度制動工況 中度制動工況的條件設定見圖9,初始速度為60 km/h,設定制動強度為4.2 m/s2,制動時間4 s,初始SOC為74.61%. 圖9 中度制動工況制動力特性 由圖9可知,制動強度大部分介于0.21~0.53,制動力主要由前軸承擔,后軸參與的比例比較小,前后軸的制動力分配與BC段的擬合見圖10,證明了該工況的制動力分配符合本文制定的策略.按照本文的模糊控制規則,電機參與的比例較大. 圖10 中度制動前后軸制動力分配 3.1.3重度制動工況 重度制動工況的條件設定見圖11,初始速度為90 km/h,設定制動強度為6.3 m/s2,制動時間4 s,初始SOC為73.89%. 圖11 重度制動工況制動力特性 由圖11可知,當制動強度介于0.53~0.7,且高速制動時,為了保證制動的穩定性同時兼顧能量回收,此時以摩擦制動為主,電機參與的比例下降,同時,受到電池充電功率的影響,電機轉矩增長放緩,前后軸的制動力分配與CD段的擬合見圖12,符合制定的制動力分配規則. 圖12 重度制動前后軸制動力分配 當制動強度大于0.7為緊急制動時,按照上文的制動力分配規則,電機幾乎不參與制動,不進行能量回收.三種制動強度工況能量回收情況見表3. 表3 三種制動工況的能量回收情況 根據文獻[13]規定,采用NEDC循環工況對本文的制動能量回收效果進行評估.不同制動控制策略下對應的電池SOC隨車速變化曲線見圖13. 圖13 SOC隨車速v變化曲線 由圖13可知,在初始SOC為75%的條件下,制動控制策略SOC變化最小,降低了8.22%,而基于I線的制動策略SOC下降達到9.12%,無能量回收制動時SOC下降達到10%.制動能量回收的目的是為了提高整車能量利用率,延長電動汽車的續航里程,以電池SOC的使用范圍95%到5%為計算目標,得出本文的制動控制策略續航里程達136.64 km,相比于基于I線的制動策略增長10 km,續航能力提升7.93%;相比于無能量回收制動增長22 km,續航能力提升19.3%.由此可以得出,制動控制策略能夠有效地回收制動能量,且能量回收效果由于基于I線的制動策略. 1) 兼顧汽車制動時安全性與回收能量的經濟性要求,根據制動特性的I線和ECE法規線制定了前后軸制動力分配策略,利用Simulink和Cruise建立起整車制動能量回收控制策略聯合仿真模型.仿真結果顯示,前后軸制動力分配服從所制定的分配規律,證明了建模方法的正確性. 2) 利用模糊控制和邏輯門限值控制建立電機再生制動力與前軸摩擦制動力的分配數學模型,滿足不同的制動工況下對電機再生制動力的需求.通過三種制動工況中電機再生制動力與前后軸制動力的分析可以看到,制定的模糊控制策略取得了良好的效果,能夠合理地安排各制動工況下電機再生制動力的占比. 3) 利用多種制動工況和NEDC循環工況對本文所提出的控制策略進行仿真試驗,三種制動工況下制動能量回收率分別為27.39%,43.43%和42.41%,取得了良好的回收效果;循環工況仿真實驗表明,文中所提出的制動能量回收策略能夠有效的提升電池SOC,相對于文中的其他兩種制動策略,續航能力提升了7.93%和19.3%,證明了制動能量回收策略的優越性.1.2 電機再生制動力分析
2 控制策略仿真模型
2.1 制動力分配模型的建模
2.2 電機再生制動力分配建模

3 仿真結果分析
3.1 不同制動強度下前后軸制動力分析
3.2 NEDC電池SOC分析
4 結 論
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02能源工程(2020年6期)2021-01-26 00:55:22鐵道通信信號(2020年9期)2020-02-06 09:15:22山東冶金(2019年3期)2019-07-10 00:54:04數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43小學科學(學生版)(2019年5期)2019-05-21 01:00:18經濟技術協作信息(2018年30期)2018-11-22 06:20:24消費導刊(2018年10期)2018-08-20 02:57:02通信電源技術(2016年1期)2016-04-16 04:57:26電測與儀表(2016年20期)2016-04-11 11:38:24