面向船舶檢驗的無人機關鍵技術解決方案
2020-04-30 06:40:46蔡玉良1向林浩1何洪磊2賴際舟2呂品2石昌俊蔡小飛
船海工程 2020年1期
蔡玉良1,向林浩1,何洪磊2,賴際舟2,呂品2,石昌俊,蔡小飛
(1.中國船級社,北京 100007;2.南京航空航天大學,南京 210000;3.南京鵬暢科技實業有限公司,南京 210000)
目前,無人機通常適應于室外或室內光線良好的環境,通過衛星導航[1]或視覺導航[2]實現定位,從而實現增穩、懸停、避障、航線規劃等智能功能,但在黑暗、封閉的鋼質船體結構內,無法實現穩定飛行和自主避障。為此,根據船舶檢驗的場景特點,結合當前無人機技術在船舶檢驗中的應用局限性和主要無人機導航與感知技術在船艙環境中的適用性,開展智能感知[3]與避障、自主容錯導航[4]等技術應用分析,實現無人機在“無衛星信息、無光照、強電磁干擾”環境下的增穩懸停、自主避障。通過無人機一體化設計,實現超高清圖像實時傳輸、無限續航等功能。并經過仿真實驗、實船實驗和示范應用,對所提出的向船舶檢驗的無人機關鍵技術解決方案進行驗證。
1 無人機船舶檢驗技術分析
1.1 規范依據
國際船級社協會(IACS)于2016年發布第42號建議案《遠程檢查技術應用指南》修訂版,明確列出了包含無人機在內的幾種遠程檢查技術,并于2018年將遠程檢查技術納入檢驗和發證統一要求。2018年7月,中國船級社(CCS)發布《鋼質海船入級規范(2018)》第1次變更通告,納入遠程檢查技術相關要求[5]。
1.2 應用優勢
在對船體結構的近觀檢驗中,驗船師需要在近距離范圍內(即伸手可及)檢驗結構細節。目前,對于難以接近的結構,一般通過腳手架、高空車、艇或筏、便攜式梯子等提供接近措施。這些措施存在成本高、效率低、危險性高等問題。
利用無人機開展船舶檢驗,將超高清圖像實時傳輸至地面監控端,以供驗船師對船體結構狀況進行實時評估,可替代腳手架、艇或筏等傳統的接近結構的措施,優勢如下。
1)降低檢驗成本。以30萬t超大型油輪為例,完成一次全船結構的近觀檢驗,需要支付約130萬元人民幣的腳手架搭建費用,以及花費約14 d的腳手架搭建時間。利用無人機開展檢驗,可節省約80%的腳手架搭建費用和70%的腳手架搭建時間。
2)提高檢驗效率。在對大型船舶檢驗時,驗船師大量的精力被花費在攀爬等體力勞動上。利用無人機開展檢驗,可以大幅度地降低驗船師的勞動強度,節省檢驗時間,提高檢驗效率。
3)降低高空作業風險。利用無人機開展檢驗,可避免高空作業,從而可降低風險,保障人員安全。
1.3 局限性
1)目前商用無人機的智能飛控、增穩懸停、航線規劃、避障等功能的實現均是以視野開闊或光線良好為前提。無人機通過衛星信號、慣性導航[6]和人工視覺模塊來獲取位置、姿態、速度、障礙物距離等數據進行綜合運算,從而實現增穩、懸停、避障、航線規劃等智能功能。但在船艙內,衛星信號被遮擋,指南針受到金屬結構干擾,視覺傳感器因為光線黑暗無法工作。因此,為保障飛行器的安全飛行,需要結合新型導航技術,針對船艙環境構建微小型飛行器自主導航方法。
2)利用無人機進行船舶檢驗時,需要抵近船體結構,以拍攝船體結構是否存在涂層剝落、裂紋、腐蝕、變形等缺陷。船艙內的結構布置復雜,為保障飛行器的安全飛行,需要對船體結構進行精確感知,使無人機能夠合理規劃路徑并及時躲避障礙物,避免發生碰撞,產生事故。
3)船舶檢驗任務對無人機硬件系統的特殊要求問題。
(1)續航能力。無人機在每個艙室內的飛行檢驗時間一般需要2~3 h,而常規商用無人機在滿載時的最大飛行時間一般在30 min左右,在1 d的船舶檢驗中,需要攜帶較多備用電池。
(2)機載相機布置。船舶檢驗任務要求無人機對其上部、前方和下部的船體結構進行拍攝,目前大部分商用無人機的機載相機在前部或下方,無法對上部結構進行拍攝。
(3)超高清實時圖傳。在船體結構近觀檢驗中,驗船師應能實時觀看無人機采集的超高清圖像,以實時準確判斷結構狀況,常規商用無人機的無線圖傳主要靠電磁波作為傳輸介質,僅能傳輸高清圖像,無法實現超高清圖像傳輸,且鋼質船體結構對電磁波會產生反射、吸收和抵消等作用,影響無線圖傳的質量和穩定性。
因此,綜合考慮船舶檢驗任務要求,需要對無人機硬件系統進行有針對性的設計。
2 解決方案
2.1 船艙模型精確構建技術
船艙為結構化環境,使用柵格地圖的表達方法,能夠較好地體現船艙結構特點。而與地面無人車相比,無人機存在較大幅度的橫滾、俯仰運動,使得所采集的激光雷達點云信息與實際環境不符,從而會導致構建的船艙模型發生畸變。因此,需要消除無人機機動帶來的激光雷達點云畸變,提高船艙模型構建的精度。
利用激光雷達點的三維幾何信息分別提取高度差特征、梯度特征、點云密集度特征和絕對高度特征等信息,并存儲到一個二維的柵格地圖中。當接收到新的激光雷達點云后,按照柵格更新公式更新地圖柵格概率值,可以得到基于三維信息的柵格地圖,精確構建船艙模型。
2.2 船艙障礙物感知與標識技術
三維激光雷達通過激光測距原理,可得到無人機周圍實時障礙物信息。采集得到的激光雷達信息不止用于無人機的導航定位,還能用于船艙環境的智能感知。
無人機與距離最近的障礙物保持安全閾值就能夠有效保證飛行安全,因此需要對最近障礙物進行標識,用于安全距離的判斷。由于激光雷達測距精度高,因此可以使用采集到的雷達距離信息進行最近障礙物的判斷。對投影后的雷達點云進行排序,提取出距離無人機最近的點云,輸出最近障礙物與無人機的相對距離及其與無人機的相對航向,完成對最近障礙物的標識,見圖1。
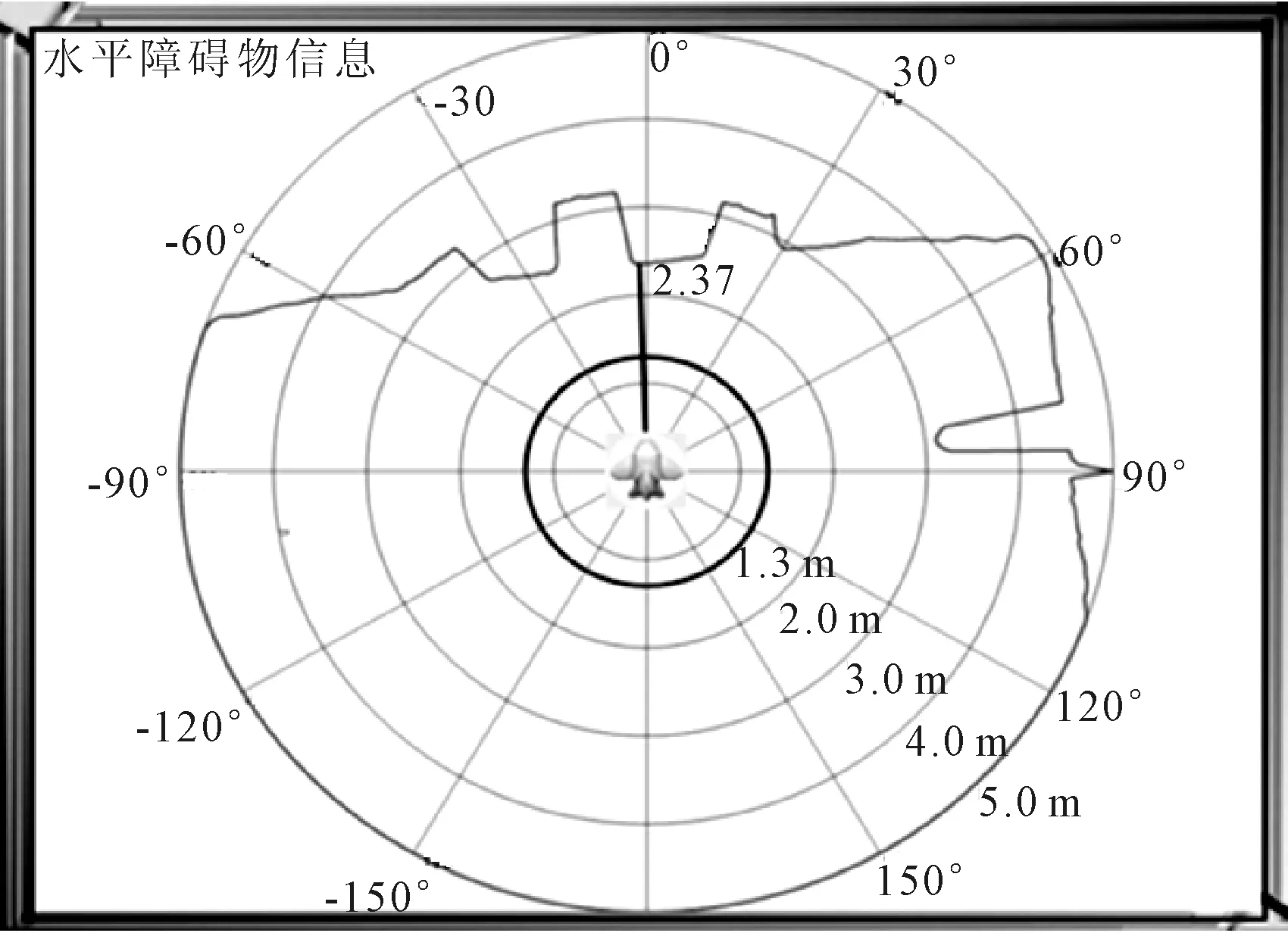
圖1 障礙物標識示意
2.3 智能避障技術
為使無人機與船艙障礙物保持一定安全距離,基于位置控制的外環飛行控制算法,能夠方便控制飛行速度和位置,使飛行器實現精準的懸停和避障功能。算法流程見圖2。
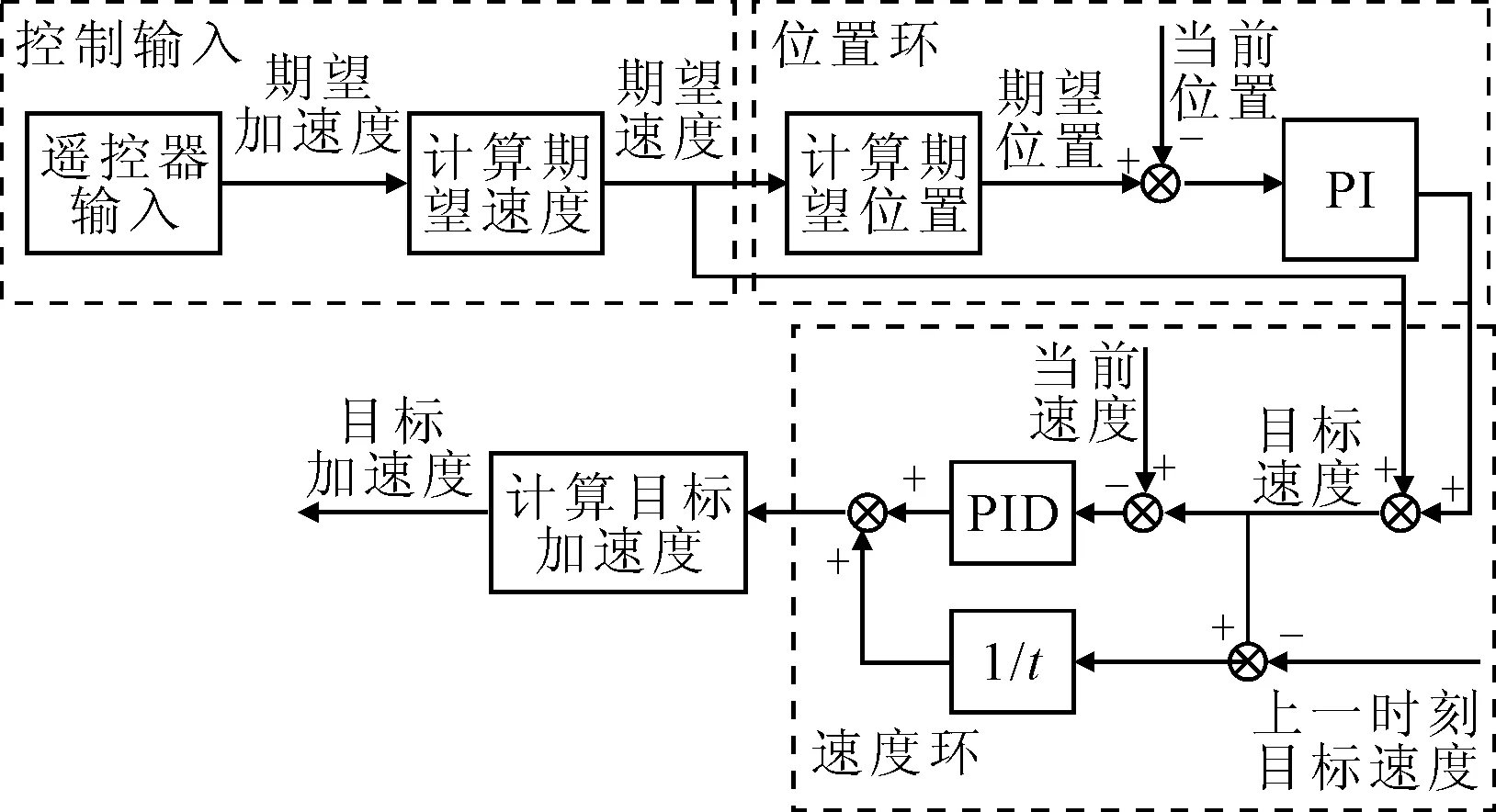
圖2 基于位置控制的飛行控制算法流程示意
基于上述飛行控制算法,結合標識出的障礙物信息,通過自主避障算法,可以實現無人機對障礙物的躲避,保證安全飛行。
根據飛行實驗結果可知,當無人機與障礙物距離小于閾值時,會自主切換為懸停模式,防止無人機與障礙物發生碰撞,從而實現安全飛行。
3 自主容錯導航技術解決方案
3.1 面向激光雷達定位的船艙特征顯著性辨識技術
關于激光雷達導航,將船艙環境分為特征豐富與特征稀疏環境。在2種不同環境下,使用的導航方式也不同。特征豐富環境下使用激光雷達同步定位與建圖(simultaneous localization and mapping, SLAM)技術,而在特征稀疏環境下使用基于動力學模型輔助的激光雷達定位技術。為實現2種模式的智能切換保證無人機的智能飛行,需要對環境進行特征顯著性辨識,從而實現自主模式切換。
為保證無人機連續不間斷的飛行要求,采用基于點云聚類與分割的環境特征顯著性辨識技術,智能識別船艙環境,生成不同的無人機控制指令,實現無人機在復雜船艙環境內的穩定飛行。
3.2 特征稀疏環境下基于動力學模型輔助的激光雷達定位技術
船艙內存在類似“單一平面”的特征稀疏環境,由于激光雷達測距范圍的限制,當搭載激光雷達的飛行器處于此區域時激光雷達只能探測到一側艙壁,對三維激光雷達而言,其幾何特征為一個平面,此時由于沒有與該艙壁平行方向的幾何特征,導致激光雷達SLAM解算的位姿在與艙壁平行方向存在較大誤差,同時該誤差會影響整個位姿解算,且逐漸累積。
通過動力學模型輔助的激光雷達定位算法,垂直平面方向提供高精度位姿信息,平行平面方向提供相對速度信息,可實現 “單一平面”的特征稀疏環境下的定位。
3.3 特征突變環境下基于慣性輔助的激光雷達魯棒定位技術
目前激光雷達SLAM中常通過掃描匹配的方法估計載體位姿,對于具有6自由度的無人機,存在著較大的局限性。當飛行器存在著高度方向的運動,而高度方向環境差異較大,導致激光雷達所掃描的環境結構會發生突變,且匹配中的參考掃描數據與當前掃描點不在同一平面,致使匹配存在較大的誤差。
針對于微小型無人機,利用慣性輔助的激光雷達Robust-SLAM方法(見圖3)解決高程方向激光雷達感知環境發生突變對定位造成的影響。
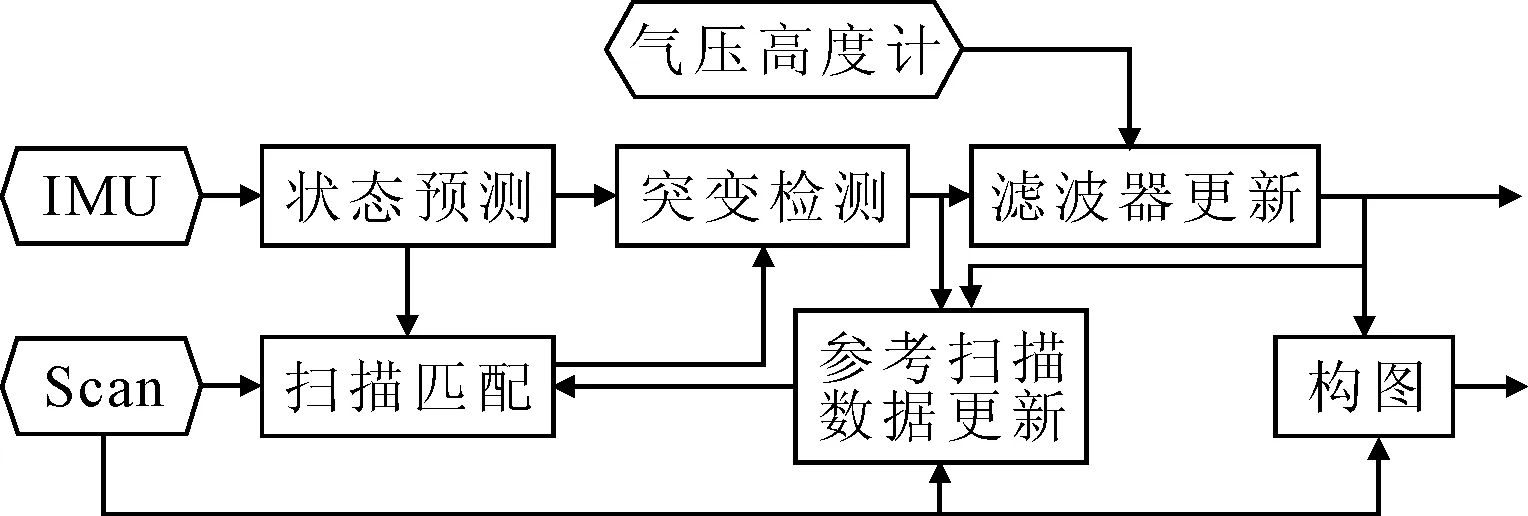
圖3 慣性輔助的激光雷達Robust-SLAM方法
3.4 基于慣性/氣壓高度計/磁傳感器/激光雷達的多源信息智能融合技術
激光雷達主要依靠SLAM算法解算得到載體的位姿信息,從而實現室內的自主定位功能。但是激光雷達SLAM解算得到的數據缺少速度信息,同時,其位姿解算的速度較慢,若只使用激光雷達SLAM技術提供微小型飛行器的導航信息,系統實時性較差。慣性導航系統主要通過對加速度計和陀螺儀輸出數據的積分來計算飛行器的速度和位置信息,其誤差會隨著時間累積而發散,但是慣性導航系統導航信息輸出頻率較高、自主性強、短時間內定位精度較高,除此以外,慣導系統還能夠提供飛行器的速度信息。將以上兩者與氣壓高度計、磁傳感器等融合,能夠得到高精度、高頻率的導航參數。
激光雷達導航系統與慣性導航系統相互獨立,由二維激光雷達SLAM解算得到導航系下的二維位置和航向信息作為量測量,通過擴展卡爾曼濾波對姿態、位置、速度、陀螺儀和加速度計的零偏進行預測,并利用實時獲取的零偏對慣導系統進行校正。可充分利用各種傳感器信息的優勢,實現基于多源信息融合的無人機導航定位。
4 一體化設計方案
4.1 圖像采集與傳輸系統設計
4.1.1 拍攝模塊
拍攝模塊由攝像頭、云臺、燈光組成,燈光以及搭載攝像頭的云臺可以在地面端的控制下實現二自由度轉動,地面端發送指令信息,以計算機作為中轉解碼設備實現對燈光和云臺的控制。攝像頭拍攝的圖像可以被地面端接收并顯示。
4.1.2 光纖傳輸
在艙室強電磁干擾的環境下,無線傳輸往往并不可靠。采用光纖數據傳輸技術,可實現無人機與地面監控端的實時信息交互,包括機載攝像頭采集的超高清圖像信息、無人機飛行狀態數據以及地面端給無人機傳達的指令。光纖通訊可保證數據傳輸質量和速度。
4.1.3 地面監控系統
整個系統通過3D激光雷達進行定位,在無人機飛至較高處時,通過地面顯控系統對無人機狀態進行監控,以輔助飛手操控飛行,保證飛行的穩定和安全。為保證易操作性,對地面監控系統實現軟件化,軟件界面見圖4。
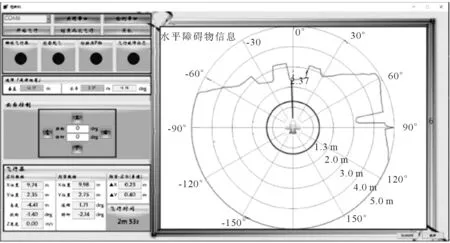
圖4 地面端監控系統軟件界面
4.2 系留供電系統設計
系留供電系統基本設計原理見圖5。地面電源將地面220 V交流電變換為高壓后通過系纜傳輸到機載電源,再變換為飛行器及任務載荷的供電電源。系纜中除了供電導線,還有2條單模光纖,可用于機載任務載荷與地面設備之間的寬帶信號通信。
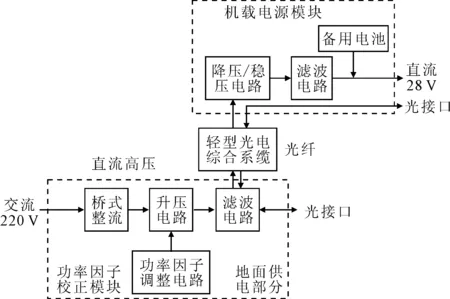
圖5 系留供電系統設計原理
5 實驗與應用
5.1 軟件仿真實驗
采用機器人仿真軟件對艙室模型、無人機模型、三維激光雷達進行仿真搭建與設計,模仿無人機在船艙中的真實飛行情況。
為了實現船艙環境的重構,需要對仿真環境中采集到的三維激光雷達點云數據進行處理,設計構圖程序,對艙室環境進行點云地圖復現,并采用圖優化技術對艙室點云模型進行優化。
將艙室3D結構模型導入機器人仿真軟件,使用搭載三維激光雷達的無人機模型在艙室內部飛行。仿真環境以及無人機模型在仿真環境中飛行情況,見圖6。
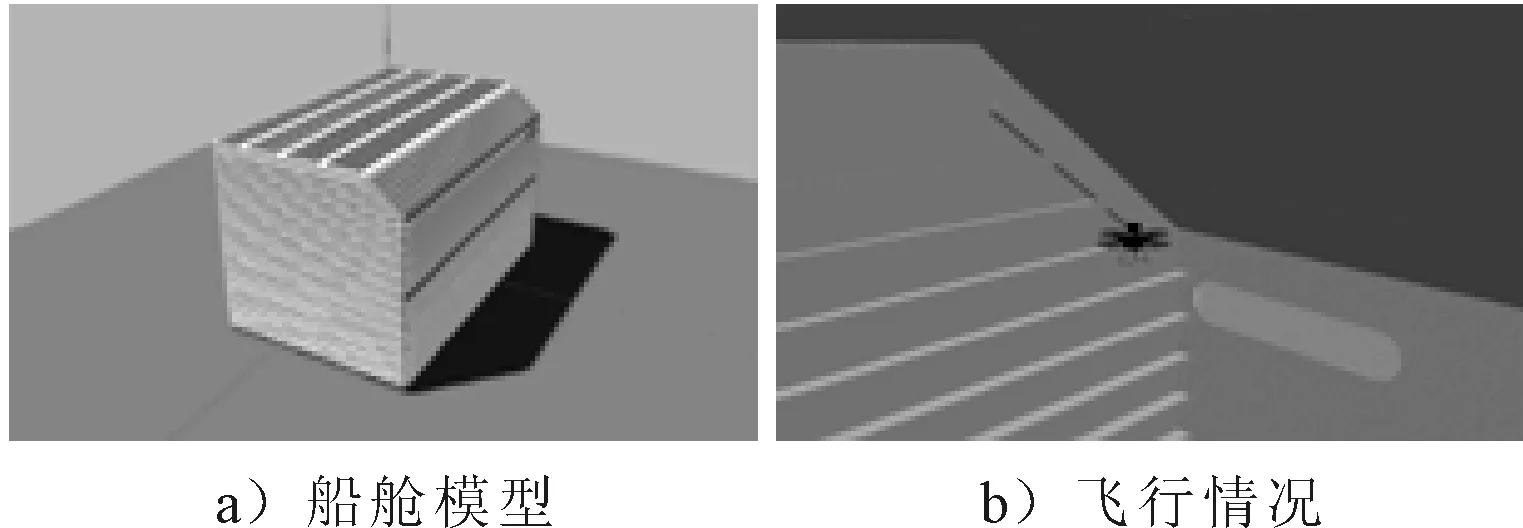
圖6 軟件仿真環境
為高效利用實船實驗采集的數據,減少迭代開發的工作量,設計數據復現程序,基于機載計算機記錄的三維激光雷達點云實現艙室三維模型的重構,對重構的模型進行優化,復現實船實驗飛行數據,提高仿真實驗精度。
使用地面端分析系統可以構建出該艙室的三維點云模型見圖7。

圖7 船舶艙室點云模型
5.2 實船實驗
使用該型無人機在一艘油輪的貨油艙內進行實船實驗,實船實驗環境見圖8。

圖8 實船實驗環境
選擇一組實驗數據進行分析,飛行速度及位置變化見圖9。
無人機在100~300 s、400~500 s懸停拍攝過程中,速度位置誤差變化較小。在0~100 s、300~400 s、500~700 s的無人機機動過程中,導航解算并未出現解算突變,無人機飛行平穩。
5.3 示范應用
2019年5月20日,在舟山中遠海運重工有限公司利用無人機作為替代方法對“桐林灣”船貨油艙成功完成近觀檢驗。
檢驗過程中,無人機根據事先制定的檢驗計劃完成了預定軌跡的飛行,對“桐林灣”貨油艙甲板強橫梁及其鄰接構件進行了近距離的圖像采集,無人機飛行穩定、圖像清晰,現場驗船師認為船體結構及涂層狀況良好。本次無人機檢驗達到了替代近觀檢驗的目的,實現了預期的目標。
6 結論
通過本文提出的無人機關鍵技術解決方案,可實現無人機在“無衛星信息、無光照、強電磁干擾”環境下的增穩懸停、自主避障,以及超高清圖像實時傳輸、無限續航等功能。
為提高無人機在船舶檢驗應用中的智能化水平,拓展應用范圍,還應繼續開展以下工作。
1)無人機在船體結構厚度測量中的應用研究。
2)船體結構缺陷圖像自動識別、測量及實時提示。
3)無人機在船舶艙室內的自主循跡飛行。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46
