多功能水體環境監測水面無人艇的設計
2020-04-30 07:06:24
船海工程 2020年1期
(湖北三江船艇科技有限公司,湖北 孝感 432100)
傳統的水體環境監測工作通常采用以下方法:①定點布放監測設備并人工定期采集數據;②乘坐水上交通工具并攜帶監測設備對水域中的某些特定點進行測量。這2種方式都存在工作效率低、實時性差、人工成本高、無法對不適宜人員進出的水域進行監測的缺點。為此,設計在多功能水體環境監測水面無人艇,以體積小、重量輕、操作便捷、維護和系統擴展方便為原則,從總體布置、船體結構、無人控制系統等方面開展設計、生產工作,并通過實際水域試驗對該無人艇的基本性能[1-2]以及自主航行、自動避障、水質采樣與監測、水體表觀光譜觀測等功能進行驗證。
1 總體技術指標
該無人艇總體技術指標見表1。
2 艇體結構
采用單體船型,相較于雙體船型,可提供更大的艙室空間,以搭載相關系統和設備。
如圖1所示,艏部甲板設置4G攝像機和避障傳感器,舯后安裝天線支架,氣象傳感器、天線、電動絞車均置于支架上;艉部設置1臺2 kW的電動舷外機作為推進動力,1臺直線電動推桿作為舵機執行器;用于固定水體表觀光譜觀測設備浮體的托架以預埋連接的方式固定于艉封板上,強度可靠、水密性好;水質采樣探頭和水質監測傳感器探頭以防水螺母鎖定在固定于艉封板的支架上,水密良好。
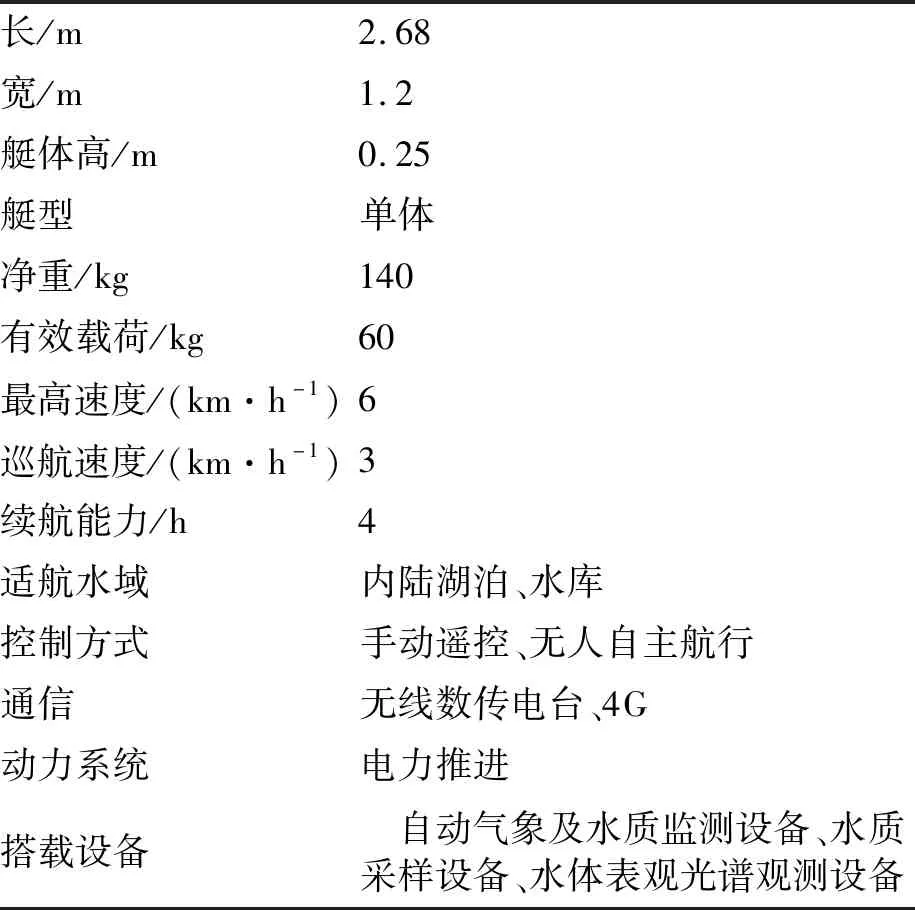
表1 多功能水體環境監測水面無人艇技術指標
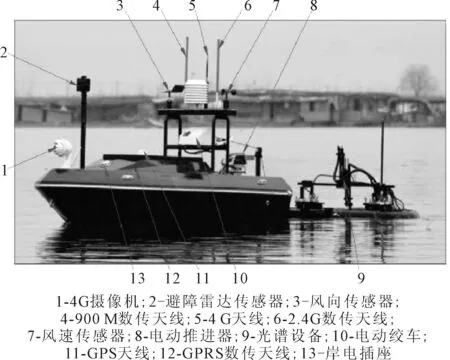
圖1 主要設備布置說明
一組鋰電池(25.6 V/220 Ah)安裝于艙內靠后的位置,根據船體浮態情況移動鋰電池位置來調整船體總重心;水質采樣設備主機、水質采樣存儲箱、自動氣象及水質監測設備主機、充電機均置于船艙內;艙內后端緊靠艙壁處為船體最低點,在該處設置自動艙底泵以排出艙內積水。
3 無人控制系統構成
3.1 艇載子系統
船載子系統是水面無人艇的控制核心,其可根據遙控器手動控制無人艇的油門及航行方向;也可以接收岸基控制站通過無線數傳電臺下發的航行路徑及任務,并智能分析路徑命令序列;同步考慮當前無人艇位置、方向信息,通過非線性預測及最優化算法等人工智能算法計算出動力系統的控制指令,控制水面無人艇的航向和航速;同時艇載子系統會解析任務載荷的命令序列,確保水面無人艇行駛到指定地點的時候能夠智能自動完成所規劃的任務[3]。
在自主航行過程中,艇載子系統通過毫米波雷達探測障礙物并采用改進蟻群算法進行自主避障操控[4],操控人員僅需進行簡單的狀態監控。
在水面無人艇的安全控制方面,除采用傳統的提高艇載軟硬件系統的可靠性、故障檢測監控與隔離技術、多重安全防護措施等方法提高水面無人艇的安全性之外,還采用了一種基于航行安全區域的控制手段,以解決水面無人艇失控駛出航行安全區域后對水面無人艇自身及岸基或水面設施帶來的安全威脅問題,進一步提高水面無人艇的航行安全[5]。
艇載無人控制系統內部通信體系采用CAN網絡,數據采集模塊、驅動模塊以及各任務載荷的控制單元均通過CAN網絡與主控制器進行通信,便于系統的統一管理,同時提高系統的可擴展性。
水面無人艇航行過程中所有的狀態信息(如位置、航行軌跡、電池電壓,航行速度等信息)都通過無線數傳電臺發送給岸基控制站,同時通過4G通信將這些信息發送回指揮大廳。
艇載無人控制系統構架見圖2。
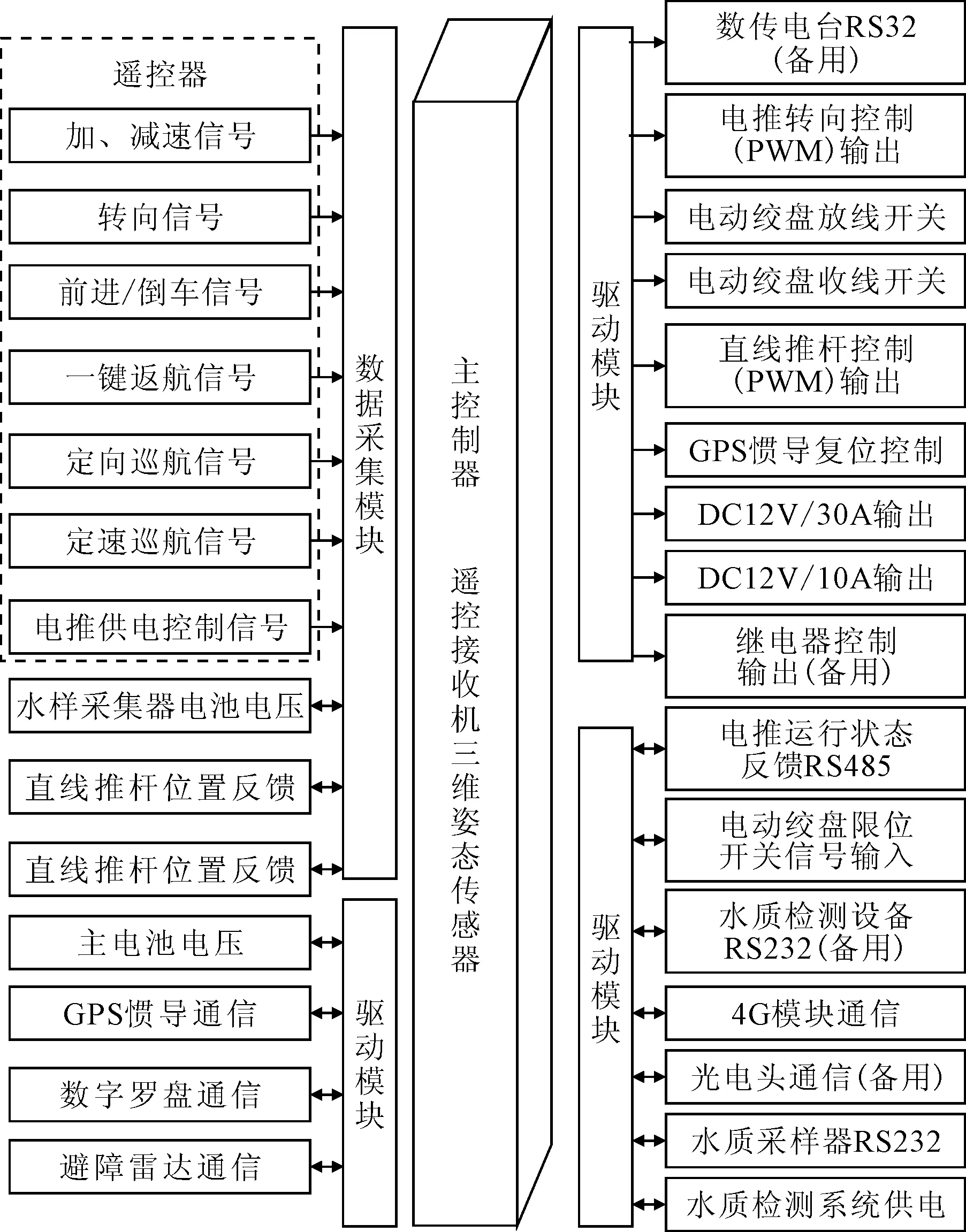
圖2 艇載無人控制系統構架
3.2 岸基地面站與遠程監控子系統
岸基地面站子系統作為整個水面無人艇系統作業現場的指揮中心,集控制、作業、通信、處理于一體的綜合控制體[6]。其控制內容包括:水面無人艇的航行過程、航行航跡、數字地圖、載荷業務控制、數據鏈路的維護以及水面無人艇的出發和回收控制。
為了適應野外及應急突發事件的需要,岸基地面站外殼采用三防工業級安全箱,集成所有岸基地面站所需的電控設備。三防箱采用新型工程塑料,箱體抗強力沖擊,防水特性達到IP65。
遠程監控子系統僅包含軟件部分,是在地面站控制軟件的簡化版本,只具有監視功能,不具有遠程控制功能,軟件可以安裝在控制中心能夠上網的電腦上面。該系統使用虛擬串口技術,通過4G網絡信號與水面無人艇進行遠程通信,所以系統環境需保證網絡的接入速度與質量。遠程監控軟件界面見圖3。

圖3 遠程監控軟件界面
4 水上試驗
試驗在湖北荊州洪湖進行。
4.1 性能試驗
水面無人艇在載荷60 kg時測量主要參數為:最高航速6.4 km/h,巡航速度航行續航時間244 min,有效通信范圍5.2 km。
4.2 自主航行試驗
根據需要在地面站軟件上設置所需數量的航點,航點間距任意。通過無線數傳電臺將設置好的命令下發給水面無人艇艇載子系統,艇載子系統解析指令后控制水面無人艇進行自主航行。無人艇的實際航跡見圖4。由圖4可以看出,水面無人艇實際航跡與規劃路徑的重合度良好。

圖4 水面無人艇實際航跡
4.3 避障功能試驗
避障功能測試與自主航行測試同步進行。湖面上原先放置多個浮筒,無人艇的航行線路的前方出現了一個浮筒障礙物(見圖5)。在探測到該浮筒后,無人控制系統執行避障算法,控制無人艇進行避障機動,當判斷到已經避開浮筒障礙物后,無人艇繼續向目標航點航行,見圖6。

圖5 無人艇航行前方出現浮筒障礙物

圖6 無人艇繞過浮筒障礙物繼續航行
4.4 水質監測試驗
從水面無人艇開機到關機全過程持續進行水質監測。通過安裝于天線架上的氣象傳感器和安裝在固定于艉封板的支架上的水質監測傳感器實時監測大氣壓力、大氣溫度、大氣濕度、水溫、水溶解氧、水PH值、濁度、葉綠素、鹽度、電導率、TDS等參數。水質監測控制模塊對采集到的數據進行整理分析后將結果通過CAN總線發送給4G網絡通信設備,通信設備將這些數據發送回地面站和控制中心顯示并存儲。所發送的數據還包含經緯度坐標點和時間戳,這是通過GPS模塊實時獲取的。
4.5 水質采樣試驗
根據水質采樣的相關行業要求,水面無人艇到達采樣點后,控制系統控制采水探頭自動下降到水面以下約50 cm的位置,并自動執行采集前管路預淋洗,采集后自動排空管路等功能,以保證采集到具有代表性的樣品[7]。
所配備的采樣設備具備多種采樣程序啟動方式:預設時間啟動、外部信號觸發啟動、超標留樣啟動、即時啟動、液位超標觸發啟動;以及多種采樣程序:定時定量采樣、定流定量采樣、流量比例采樣、液位比例采樣、即時定量采樣等。主控制器通過CAN通信接口與采樣設備通信,在自主航行時根據預設任務控制采樣設備執行水質采樣工作。
4.6 漂浮式水體表觀光譜觀測試驗
水體表觀光譜觀測設備實物見圖7,是一套基于直接離水輻亮度觀測方法的(原理如見圖8)、小型化、智能化、漂流光學浮標式、直測法原位表觀光譜觀測設備。該設備采用高性能的工業級處理器,集成兩套獨立的高光譜輻射測量模塊,實現直接離水輻亮度和太陽入射輻照度的同步測量,獨有的小型探頭、大直徑的環形漂流浮標和模塊化的組件設計可降低漂流光學浮標本體自陰影的影響。同時該設備集遠程控制、光譜自動采集、積分時間自動調整以及同步記錄姿態、GPS等功能于一體,為用戶提供便捷、友好的操作體驗。
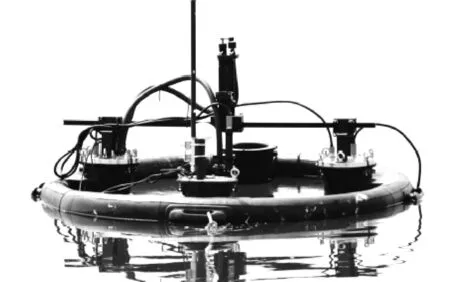
圖7 漂浮式水體表觀光譜觀測設備
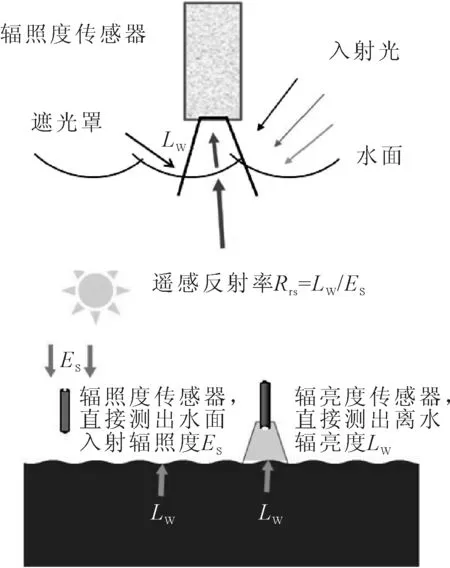
圖8 直接離水輻亮度觀測方法原理
根據所需光譜觀測的位置,通過地面站軟件設置航點并加載光譜測量的任務,然后下發給艇載無人控制系統,由艇載無人控制系統控制水面無人艇自主航行,到達測量點時,自動控制絞車設備將水體表觀光譜觀測設備釋放出來并遠離船體10~15 m,以免無人艇的陰影對測量結果產生影響。
5 結論
相比傳統水體環境監測方法,多功能水體環境監測水面無人艇可在自主航行時,自動完成相應的監測、采樣、分析等工作,并通過無線數據鏈路將相關數據反饋給控制基站顯示并存儲,在自動化作業程度、工作效率、實時性等方面具有突出的優勢。
無人控制系統采用CAN通信網絡體系結構,控制器、傳感器、執行驅動器均通過CAN總線連接,布線簡潔、維護方便、便于系統擴展。
無人艇采用鋰電池組作為整艇的主電源,鋰電池組的容量就成為該無人艇作業時間受限的瓶頸。后續應對船體結構和設備艙的布置進行優化設計,以提供更大的空間,布置容量更大的鋰電池組,延長無人艇的作業時間。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年14期)2018-08-21 01:38:16
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
水利規劃與設計(2016年7期)2016-02-28 15:06:27
設備管理與維修(2015年12期)2015-04-09 06:57:00
