城市軌道交通列車司機(jī)駕駛狀態(tài)監(jiān)測(cè)研究
2020-05-06 03:36:30王亮軍陳燕飛靳育權(quán)
中國(guó)新技術(shù)新產(chǎn)品 2020年5期
王亮軍 陳燕飛 靳育權(quán)
(南京交通職業(yè)技術(shù)學(xué)院,江蘇 南京 211188)
截至2019年10月,中國(guó)內(nèi)地共39 個(gè)城市開通地鐵,運(yùn)營(yíng)總里程達(dá)5 800 km 以上,2018年客運(yùn)量213 億人次,在開通城市數(shù)量、軌道交通運(yùn)營(yíng)里程、運(yùn)營(yíng)客運(yùn)量等方面均居世界第一。城市軌道交通的快速發(fā)展,極大地方便了人民日常生活,促進(jìn)了經(jīng)濟(jì)發(fā)展,同時(shí)也對(duì)列車的運(yùn)營(yíng)安全提出了更高的要求。目前,提高列車安全性的主要措施包括使用高度自動(dòng)化的列車運(yùn)行控制系統(tǒng)控制列車運(yùn)行、研發(fā)智能化的監(jiān)測(cè)裝備監(jiān)督列車運(yùn)行狀態(tài),但對(duì)列車司機(jī)的駕駛風(fēng)險(xiǎn)幾乎沒有監(jiān)督防護(hù)措施。城市軌道交通列車一般采用單司機(jī)駕駛,如果在駕駛列車過程中發(fā)生司機(jī)注意力下降、打瞌睡等狀況時(shí),容易造成安全事故。因此,對(duì)列車司機(jī)駕駛狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè)和管理,已成為保障列車運(yùn)行安全的必要手段。
1 司機(jī)駕駛狀態(tài)監(jiān)測(cè)技術(shù)
1.1 基于運(yùn)行狀態(tài)的監(jiān)測(cè)技術(shù)
該技術(shù)是根據(jù)車體運(yùn)行狀態(tài),間接監(jiān)測(cè)司機(jī)駕駛狀態(tài)的方法,通過安裝在車上的各種傳感器監(jiān)測(cè)車體運(yùn)行時(shí)的相關(guān)狀態(tài)指標(biāo),例如從加速度、檔位、運(yùn)行車道、方向盤轉(zhuǎn)向角等狀態(tài)的更新來推斷司機(jī)的狀態(tài)。由于列車運(yùn)行在特定的軌道上,所以該方式不適合對(duì)城市軌道交通列車司機(jī)的駕駛狀態(tài)進(jìn)行監(jiān)測(cè)[1]。
1.2 基于列車司機(jī)行為變化的監(jiān)測(cè)技術(shù)
該技術(shù)通過分析機(jī)車司機(jī)關(guān)鍵行為的變化,例如眼睛狀態(tài),面部位置移動(dòng)等,來推斷司機(jī)的狀態(tài)。該方法的實(shí)現(xiàn)主要依賴圖像識(shí)別技術(shù)[2]。隨著機(jī)器視覺技術(shù)和計(jì)算機(jī)技術(shù)的日趨成熟,使追蹤、捕獲和分析眼瞼運(yùn)動(dòng)、臉部表情和頭部姿勢(shì)成為可能。
1.3 面向列車司機(jī)生理信號(hào)的監(jiān)測(cè)技術(shù)
該技術(shù)主要依據(jù)生理指標(biāo)來分析司機(jī)的狀態(tài),包括獲取司機(jī)的腦電信號(hào)、心電信號(hào)等[3]。該方法可靠性更高,但一般通過接觸式傳感器采集生理信號(hào),適應(yīng)性受限。
目前,對(duì)司機(jī)駕駛狀態(tài)監(jiān)測(cè)的研究及應(yīng)用,主要集中在汽車和高鐵行業(yè),對(duì)城市軌道交通行業(yè)的研究較少。已有的監(jiān)測(cè)方法由于手段單一,準(zhǔn)確率不高,不適用于城市軌道交通列車司機(jī)駕駛狀態(tài)的監(jiān)測(cè)。
2 城市軌道交通列車司機(jī)駕駛狀態(tài)監(jiān)測(cè)指標(biāo)選擇
影響城市軌道交通列車運(yùn)營(yíng)安全的因素有3 個(gè),即人、機(jī)和環(huán)境。“機(jī)”因素主要指設(shè)備,當(dāng)前運(yùn)營(yíng)線路的列車都采用高安全性的自動(dòng)駕駛系統(tǒng)。“環(huán)境”因素指列車運(yùn)行的軌道狀態(tài)、限界等,部分環(huán)境因素,例如列車運(yùn)行前方線路是否有異物侵入限界等,須由司機(jī)確保安全性,因此需要監(jiān)測(cè)司機(jī)的注意力程度。“人”的因素主要包括司機(jī)的違規(guī)操作和操縱失誤,其主要誘因是司機(jī)身體不適、疲勞駕駛和工作壓力。
城市軌道交通系統(tǒng)站間距離小,需要頻繁停車,司機(jī)帶來的安全風(fēng)險(xiǎn)主要存在于列車運(yùn)行過程中,因此要對(duì)列車運(yùn)行過程中司機(jī)的規(guī)范操作手勢(shì)、注意力集中程度和身體狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè),當(dāng)有異常情況時(shí)方便行車調(diào)度員及時(shí)進(jìn)行處理[4]。
2.1 城市軌道交通列車司機(jī)駕駛狀態(tài)監(jiān)測(cè)技術(shù)
2.1.1 基于視覺分析的司機(jī)注意力集中度監(jiān)測(cè)
該方法屬于非接觸式監(jiān)測(cè)方法,安裝方便,適應(yīng)性強(qiáng)。通過追蹤分析眼睛狀態(tài)判斷司機(jī)的注意力集中程度。城市軌道交通系統(tǒng)的列車運(yùn)行線路有高架、地面和隧道,在不同線路條件下列車司機(jī)的面部光線會(huì)有明顯差異。因此,選用近紅外攝像頭來采集司機(jī)的面部圖像,以確保在不同光照條件下都能得到高質(zhì)量的臉部圖像。圖1 是基于視覺分析的列車司機(jī)狀態(tài)監(jiān)測(cè)軟件算法流程圖。
主要算法由3 個(gè)部分組成,即臉部定位與追蹤模塊、臉部特征定位模塊以及注意力集中度識(shí)別模塊。首先,使用Adaboost 算法確定司機(jī)的臉部,在臉部范圍內(nèi)進(jìn)一步確定眼睛的位置。使用二值化方法確定眼睛的位置,在該過程中使用極大極小值進(jìn)行濾波,再進(jìn)行閉運(yùn)算并濾掉面積過小的區(qū)域,在圖像上方2/3 區(qū)域內(nèi)搜索連續(xù)模塊作為眼睛的可能位置,再將其送到SVM 分類器模塊中進(jìn)行確認(rèn),即可確定眼睛的位置。然后使用基于粒子濾波器的算法追蹤眼睛的移動(dòng),并基于Camshift 算法再次確認(rèn)眼睛的跟蹤位置。使用灰度直方圖和局部標(biāo)準(zhǔn)差直方圖作為司機(jī)眼睛跟蹤的2 個(gè)特征,建立觀測(cè)概率模型,追蹤司機(jī)的眼睛,接著使用Camshift 算法二次確認(rèn)司機(jī)眼睛的位置,提高魯棒性。最后,識(shí)別司機(jī)眼睛的睜閉狀態(tài),并結(jié)合連續(xù)幀中的司機(jī)眼睛狀態(tài)來判斷司機(jī)的注意力集中程度[5]。定義R為相關(guān)值,使用R值可判別司機(jī)眼睛的睜閉情況。

式中:(x,y)為圖像坐標(biāo)中任意一點(diǎn),T(x,y)是睜眼模板;是模板灰度的平均值;I(x,y)是采集到的眼睛圖像,是眼睛圖像灰度平均值。
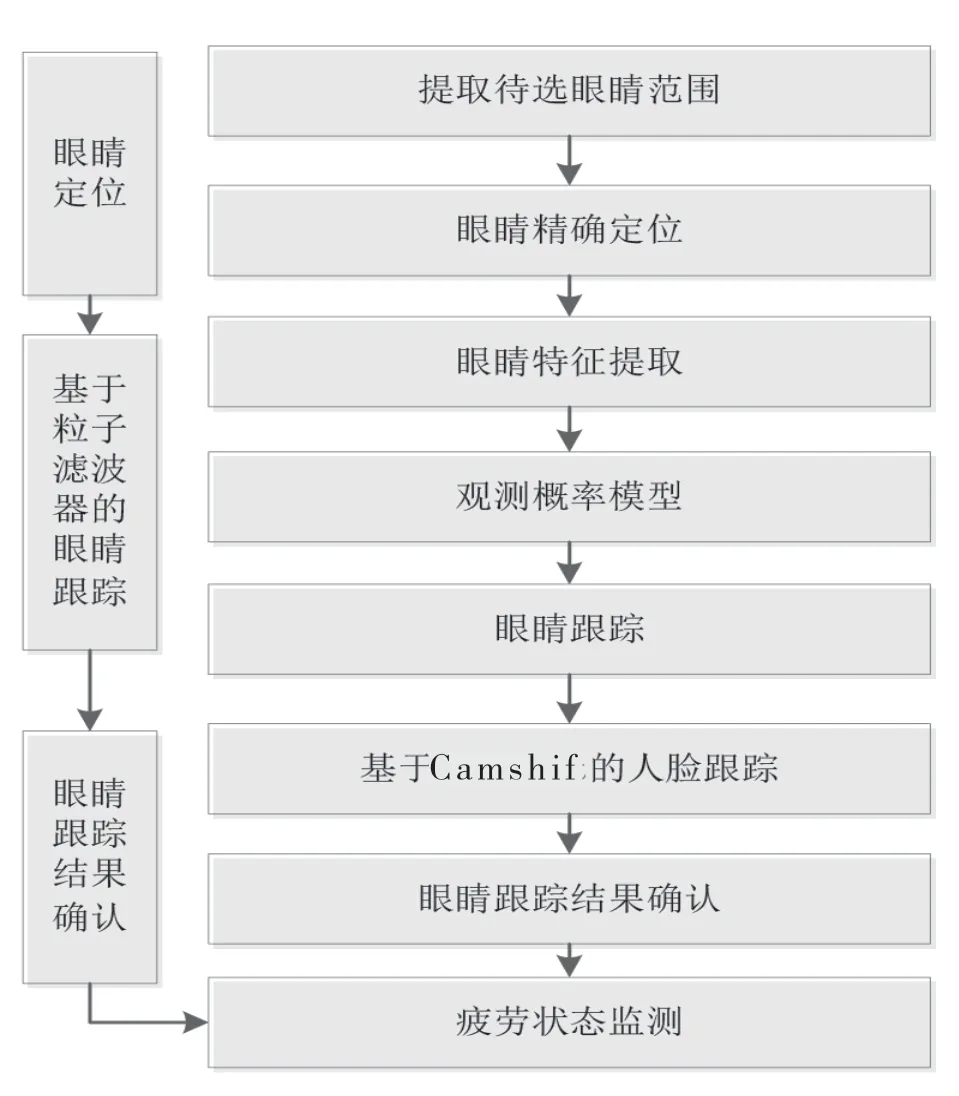
圖1 基于視覺分析的列車司機(jī)狀態(tài)監(jiān)測(cè)算法流程圖
2.1.2 基于三軸加速度傳感器的司機(jī)規(guī)范手勢(shì)監(jiān)測(cè)
司機(jī)在作業(yè)過程中,例如通過道岔、確認(rèn)信號(hào)狀態(tài)時(shí),為保證安全需要進(jìn)行規(guī)范化的手勢(shì)操作,為檢測(cè)司機(jī)的規(guī)范操作行為,使用基于加速度傳感器的操作手勢(shì)識(shí)別方式,加速度傳感器嵌入可穿戴的智能手環(huán)中,通過手環(huán)的采集數(shù)據(jù)分析司機(jī)的規(guī)范化操作手勢(shì)。該方案可選用MMA7260 模塊采集司機(jī)手腕的加速度信號(hào),然后對(duì)采集信號(hào)進(jìn)行預(yù)處理,根據(jù)手勢(shì)軌跡數(shù)據(jù)完成自動(dòng)檢測(cè)、選擇低通數(shù)字濾波器濾除噪聲、通過二次采樣解決不同動(dòng)作速度采集數(shù)據(jù)量不一樣的問題,經(jīng)過3 個(gè)步驟后提取手勢(shì)動(dòng)作的特征參數(shù),最后使用離散隱馬爾可夫模型進(jìn)行手勢(shì)動(dòng)作識(shí)別[6]。
2.1.3 基于智能手環(huán)的司機(jī)體征監(jiān)測(cè)
智能手環(huán)作為一種新興的可穿戴智能設(shè)備,已廣泛用于運(yùn)動(dòng)、睡眠、身體指標(biāo)等數(shù)據(jù)的采集與記錄中,醫(yī)用健康手環(huán)可以測(cè)量脈搏、心率、皮膚溫度、血壓等重要體征參數(shù)。所以可以使用醫(yī)用健康手環(huán)采集司機(jī)的心率和血壓信息,進(jìn)而實(shí)時(shí)監(jiān)測(cè)司機(jī)身體的關(guān)鍵指標(biāo)。具體包括3 個(gè)步驟。1) 使用手環(huán)監(jiān)測(cè)每位司機(jī)的心率和血壓信息。2) 根據(jù)每位司機(jī)的歷史體征數(shù)據(jù)確定司機(jī)的關(guān)鍵指標(biāo)的上下門限值。3) 判斷司機(jī)狀態(tài)的關(guān)鍵指標(biāo)是否超出閾值范圍以及持續(xù)時(shí)間,判斷司機(jī)的身體狀態(tài)。
3 數(shù)據(jù)融合
城市軌道交通列車司機(jī)的駕駛狀態(tài)通過多種方式進(jìn)行監(jiān)測(cè),每種監(jiān)測(cè)方式從不同的角度識(shí)別司機(jī)的駕駛狀態(tài),對(duì)于多種不同的監(jiān)測(cè)信息要通過加權(quán)的方式進(jìn)行綜合分析處理,最后得到司機(jī)的綜合狀態(tài)。司機(jī)的綜合狀態(tài)判定值G可以通過以下矩陣融合公式得出:

式中:X1為基于視覺分析的司機(jī)注意力集中度等級(jí),X2為基于三軸加速度傳感器的司機(jī)規(guī)范操作監(jiān)測(cè)等級(jí),X3為基于智能手環(huán)的司機(jī)體征監(jiān)測(cè)等級(jí),y1為X1對(duì)應(yīng)指標(biāo)的權(quán)重值,y2為X2對(duì)應(yīng)指標(biāo)的權(quán)重值,y3為X3對(duì)應(yīng)指標(biāo)的權(quán)重值,其根據(jù)每項(xiàng)監(jiān)測(cè)指標(biāo)對(duì)列車安全性影響的大小取值,T為矩陣運(yùn)算符號(hào),表示轉(zhuǎn)置矩陣。
參照鐵路安全防護(hù)設(shè)計(jì)規(guī)范中的相關(guān)標(biāo)準(zhǔn),當(dāng)時(shí)間T不等于站停時(shí)間T站停時(shí),根據(jù)司機(jī)在列車運(yùn)行過程中的閉眼時(shí)間T,將司機(jī)的注意力集中程度劃分為3 個(gè)等級(jí),可以表示為:

結(jié)合列車運(yùn)行線路,從列車的定位系統(tǒng)中獲取實(shí)時(shí)位置信息,查找需要確認(rèn)的手勢(shì),監(jiān)測(cè)司機(jī)在每個(gè)位置點(diǎn)的手勢(shì)動(dòng)作,判斷司機(jī)的操作是否規(guī)范,對(duì)司機(jī)未規(guī)范操作的次數(shù)進(jìn)行累計(jì)計(jì)算。根據(jù)司機(jī)未規(guī)范操作的次數(shù)S,將其分為3個(gè)等級(jí),可表示為:

當(dāng)智能手環(huán)監(jiān)測(cè)到的心率或血壓超過閾值時(shí),記錄超過閾值的持續(xù)時(shí)間。根據(jù)超過閾值的持續(xù)時(shí)間T將司機(jī)狀態(tài)劃分為3 個(gè)等級(jí),表示為:

4 城市軌道交通司機(jī)駕駛狀態(tài)監(jiān)測(cè)算法檢驗(yàn)分析
選用硬件配置為i5 處理器、內(nèi)存4G 以上的計(jì)算機(jī),使用C 語言在Visual Studio 2010 環(huán)境下完成軟件編寫。為檢驗(yàn)基于數(shù)據(jù)融合的司機(jī)駕駛狀態(tài)監(jiān)測(cè)方法的準(zhǔn)確性和性能,選擇具有高架、地面和隧道場(chǎng)景的線路,使用列車模擬駕駛環(huán)境,駕駛列車4 h,設(shè)置駕駛狀態(tài)異常場(chǎng)景類型,見表1,各種故障場(chǎng)景按照地面線路、高架線路和隧道線路均衡分布,并隨機(jī)插入模擬駕駛的過程中,確保在各種線路環(huán)境中均有以下各類異常情況出現(xiàn)。
從仿真監(jiān)測(cè)結(jié)果表2 中可以看出,仿真過程總注入24個(gè)異常點(diǎn),在模擬列車駕駛的過程中,系統(tǒng)共計(jì)監(jiān)測(cè)到22個(gè)司機(jī)駕駛狀態(tài)異常的報(bào)警信息,監(jiān)測(cè)準(zhǔn)確率達(dá)91.6%以上,漏報(bào)率較低,系統(tǒng)能在不同的環(huán)境下對(duì)列車司機(jī)的駕駛狀態(tài)監(jiān)督。

表1 模擬駕駛過程中駕駛狀態(tài)異常類型及等級(jí)

表2 仿真監(jiān)測(cè)結(jié)果
5 結(jié)語
該文設(shè)計(jì)的列車司機(jī)駕駛狀態(tài)監(jiān)測(cè)技術(shù)能夠?qū)崿F(xiàn)司機(jī)注意力集中程度、規(guī)范操作行為和關(guān)鍵體征指標(biāo)的實(shí)時(shí)監(jiān)測(cè),并可通過車地通信系統(tǒng)實(shí)時(shí)傳遞到集中控制中心進(jìn)行管理、分析、存儲(chǔ)和報(bào)警,滿足集中控制的需要,可以降低人為因素給列車帶來的安全風(fēng)險(xiǎn)。該方法引入視覺識(shí)別技術(shù)和智能手環(huán),其靈活性和適用性更強(qiáng),能夠在不改變現(xiàn)有列車司機(jī)工作方式的基礎(chǔ)上完成監(jiān)測(cè)。
