淺談搬運助力外骨骼機器人設計
2020-05-06 03:36:30鐘鵬程徐心睿姚羽霏張家齊
中國新技術新產品 2020年5期
鐘鵬程 徐心睿 董 含 姚羽霏 張家齊
(1.中國礦業大學孫越崎學院,江蘇 徐州 221116;2.中國礦業大學機電工程學院,江蘇 徐州 221116)
0 引言
外骨骼機器人是模仿生物學的外骨骼而提出的一種新型機電一體化裝置[1],通過多種技術相互結合,能為穿戴者提供保護、身體支撐和協同動作等功能,輔助穿戴者完成相應的任務[2]。未來外骨骼機器人可主要應用于工業領域的負重高強度作業和助力搬運、軍事領域的單兵作戰和生活領域的患者四肢康復、老人出行等方面,應用前景廣闊[3]。
針對工業領域的高強度負重作業和搬運重物造成工人體力消耗大、安全性低等問題,有學者設計了一種用于輔助搬運的全身外骨骼助力機器人,能輔助搬運重物,減輕使用者所受重物的壓力[4],但缺點也較為明顯:自由度不高,不能很好地配合使用者完成相應的動作。背部支架與下肢部件剛性連接,彎腰靈活性差。關節缺少機械限位結構,存在安全隱患。因此,針對上述問題,該文設計了一種搬運助力外骨骼機器人。
1 搬運助力外骨骼機器人設計
如圖1 所示,搬運助力外骨骼機器人包括動力裝置、限位裝置、主控模塊、上肢部件、背部架體、背部綁帶、外骨骼腰部、伸縮助力裝置、連接帶和下肢部件。背部綁帶設置在背部架體上。背部架體上端兩側對稱設置多個孔,用于調節肩部寬度。主控模塊設置在背部架體的后側。2 個上肢部件安裝在背部架體兩側的上方,2 個下肢部件安裝在外骨骼腰部兩側的下方。外骨骼腰部設置多個孔,用于調節腰部寬度。伸縮助力裝置與連接帶連接背部架體與外骨骼腰部,能夠有效輔助彎腰動作。伸縮助力裝置包括外套筒、內套筒和彈簧,外套筒與內套筒連接,彈簧設置在外套筒和內套筒的內部。連接帶可伸縮,具有彈性。
上肢部件包括肩關節、外骨骼大臂、大臂伸縮裝置、大臂綁帶、肘關節、外骨骼小臂、小臂伸縮裝置、小臂綁帶、把手和手部傳感裝置。如圖2 所示,肩關節包括肩部第一桿件和肩部第二桿件。肩部第一桿件設置在背部架體的孔上,實現肩關節的外展/內收。肩部第二桿件設置在肩部第一桿件上,呈“L”型,實現肩關節的外旋/內旋。外骨骼大臂設置在肩部第二桿件上,實現肩關節的伸/屈。肘關節設置在外骨骼大臂與外骨骼小臂連接處。外骨骼大臂與外骨骼小臂上分別設置有大臂綁帶與小臂綁帶。大臂伸縮裝置和小臂伸縮裝置分別設置在外骨骼大臂與外骨骼小臂上,用于調節其長度。把手和手部傳感裝置設置在外骨骼小臂末端。上肢部件中,肩關節有3 個自由度,肘關節有1 個自由度。

圖1 外骨骼機器人整體結構示意圖
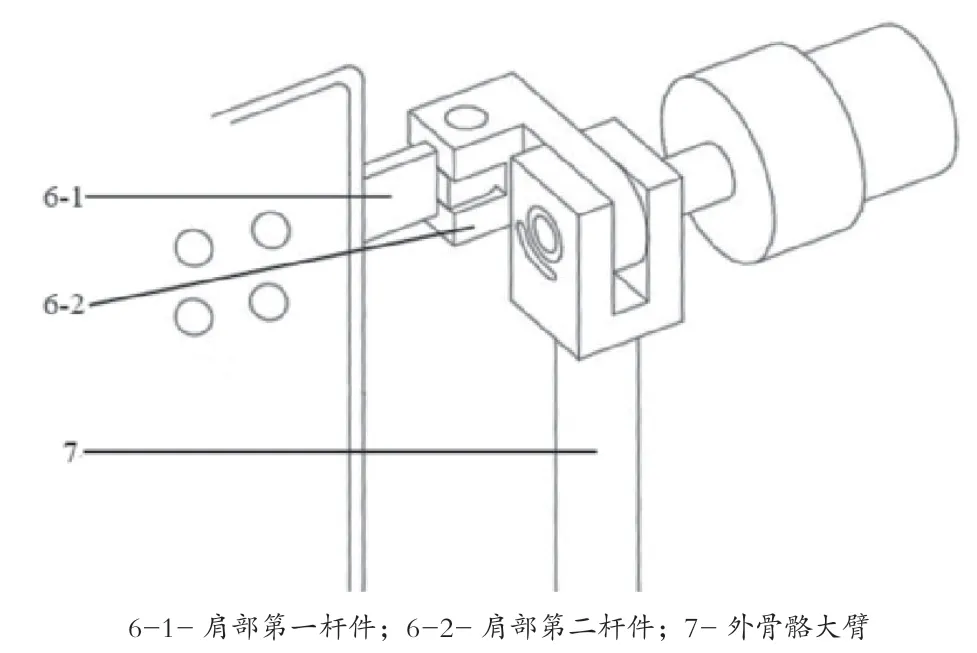
圖2 外骨骼機器人肩關節結構示意圖
下肢部件包括髖關節、外骨骼大腿、大腿伸縮裝置、大腿綁帶、膝關節、外骨骼小腿、小腿伸縮裝置、小腿綁帶、踝關節、外骨骼鞋、腳部傳感裝置和鞋部綁帶。如圖3 所示,髖關節包括Ⅰ桿、Ⅱ桿和Ⅲ桿。Ⅰ桿設置在外骨骼腰部的孔上。Ⅱ桿設置在Ⅰ桿上,實現髖關節的外展/內收。Ⅲ桿設置在Ⅱ桿上,實現髖關節的外旋/內旋。外骨骼大腿設置在髖關節的Ⅲ桿上,實現髖關節的伸/屈。膝關節設置在外骨骼大腿與外骨骼小腿連接處。外骨骼大腿與外骨骼小腿上分別設置有大腿綁帶與小腿綁帶。大腿伸縮裝置和小腿伸縮裝置分別設置在外骨骼大腿與外骨骼小腿上,用于調節其長度。踝關節設置在外骨骼小腿與外骨骼鞋連接處。外骨骼鞋上設置腳部傳感裝置和鞋部綁帶。下肢部件中,髖關節有3 個自由度,膝關節有1 個自由度,踝關節有2 個自由度。

圖3 外骨骼機器人髖關節結構示意圖
動力裝置包括傳動系統、減速器、電機和角度傳感器,設置在膝關節、髖關節、肩關節和肘關節上,其中角度傳感器安裝在電機上。
限位裝置設置在踝關節、膝關節、髖關節、肩關節和肘關節上,限定外骨骼機器人的運動范圍,防止外骨骼機器人出現故障時對使用者造成傷害。如圖3 所示,髖關節限位裝置設置在Ⅰ桿、Ⅱ桿、Ⅲ桿和外骨骼大腿連接處,其中Ⅰ桿與Ⅱ桿連接處限定了髖關節的外展/內收,Ⅱ桿與Ⅲ桿連接處限定了髖關節的外旋/內旋,Ⅲ桿與外骨骼大腿連接處限定了髖關節的伸/屈。
2 搬運助力外骨骼機器人工作原理
使用者穿戴搬運助力外骨骼機器人前,根據使用者的身材、調整肩部寬度和腰部寬度,確定肩部第一桿件設置在背部架體的孔的位置和Ⅰ桿設置在外骨骼腰部的孔的位置。調整小腿伸縮裝置、大腿伸縮裝置、大臂伸縮裝置和小臂伸縮裝置,從而確定外骨骼小腿、外骨骼大腿、外骨骼大臂和外骨骼小臂的長度。使用者穿戴搬運助力外骨骼機器人時,用鞋部綁帶將使用者腳部與外骨骼鞋固定,用小腿綁帶將使用者小腿與外骨骼小腿固定,用大腿綁帶將使用者大腿與外骨骼大腿固定,用背部綁帶將使用者背部與背部架體固定,用大臂綁帶將使用者大臂與外骨骼大臂固定,用小臂綁帶將使用者小臂與外骨骼小臂固定。
使用者穿戴好搬運助力外骨骼機器人后,當要搬運重物時,先彎下腰,使用者髖關節的運動帶動外骨骼機器人的髖關節轉動一定角度,外骨骼機器人的伸縮助力裝置收縮,連接帶彎曲。使用者上肢肘關節與肩關節的運動帶動外骨骼機器人的肘關節與肩關節的運動,將重物搬起,同時直起腰,使用者髖關節的運動帶動外骨骼機器人的髖關節轉動一定角度,外骨骼機器人的伸縮助力裝置拉伸,連接帶彈起,有效輔助彎腰搬起重物。行走過程中,使用者下肢髖關節和膝關節的運動帶動外骨骼機器人的髖關節和膝關節的運動,輔助使用者行走。同時,外骨骼機器人的上肢部件輔助使用者在行走過程中托舉重物。到達目的地后,先彎下腰,使用者髖關節的運動帶動外骨骼機器人的髖關節轉動一定角度,外骨骼機器人的伸縮助力裝置收縮,連接帶彎曲。使用者上肢肘關節與肩關節的運動帶動外骨骼機器人的肘關節與肩關節的運動,將重物放下,同時直起腰,使用者髖關節的運動帶動外骨骼機器人的髖關節轉動一定角度,外骨骼機器人的伸縮助力裝置拉伸,連接帶彈起。在搬運重物的過程中,當關節的電機轉動到一定角度后,角度傳感器檢測到預先設定好的角度,傳遞給主控模塊,主控模塊控制電機停止轉動。限位裝置限定的角度略大于關節運動預先設定好的角度。在搬運重物的過程中,如果外骨骼機器人出現的故障導致電機無法停止轉動,那么該關節的限位裝置會限制關節轉動,從而使電機轉速變為0。此時,角度傳感器測得的角度超過預先設定好的角度,并且角度傳感器測得電機轉速突然變為0,信號傳給主控模塊,主控模塊控制電機停止工作。沒有電機驅動的關節的限位裝置限定了該關節自由轉動的角度,保證了工作時關節在安全的角度范圍內轉動。
3 結語
針對工業領域的高強度負重作業和搬運重物造成工人體力消耗大、安全性低等問題,該文設計了一種搬運助力外骨骼機器人。外骨骼機器人的關節自由度符合人體特征,運動靈活。背部架體與外骨骼腰部之間設置了伸縮助力裝置與連接帶,能夠有效輔助彎腰動作。四肢可快速調節長度,方便穿戴,結構簡單。各個關節都設置了限位裝置,防止外骨骼機器人出現故障時對使用者造成傷害,安全性高,能幫助穿戴者輔助搬運重物,降低疲勞強度,提高工作效率。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
少先隊活動(2021年4期)2021-07-23 01:46:22
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
