基于復(fù)合控制策略的三相逆變研究
2020-05-06 10:50:26陳翰峰關(guān)世榮
通信電源技術(shù) 2020年24期
關(guān)鍵詞:系統(tǒng)
李 文,陳翰峰,關(guān)世榮
(國(guó)網(wǎng)寧東供電公司,寧夏 靈武 750411)
0 引 言
隨著當(dāng)今電力電子技術(shù)的不斷推進(jìn)和快速發(fā)展,逆變?cè)诖啊⒑娇蘸教臁⑹汀⒁苯鹨约巴ㄐ沤粨Q機(jī)等領(lǐng)域都有著非常廣泛的應(yīng)用[1]。三相逆變擁有較強(qiáng)的向不平衡負(fù)載供電的能力。通常不平衡負(fù)載條件會(huì)引起輸出電壓不平衡,從而導(dǎo)致三相逆變電源不能正常工作,因而對(duì)提高三相逆變電源帶不平衡負(fù)載能力進(jìn)行分析和研究具有深刻意義[2,3]。
目前,矯正三相逆變器在不平衡負(fù)載下輸出電壓不對(duì)稱的措施中,主電路主要包括三相分裂電容式逆變拓?fù)洹⑷嗨臉虮勰孀兺負(fù)湟约安迦毽?Y變壓器拓?fù)鋄4-6]。但幾種拓?fù)涠加兴鼈兊娜毕荩喾至央娙菔侥孀兺負(fù)浯嬖诜浅4蟮碾娙菥鶋簡(jiǎn)栴},直流電壓的利用率非常低[7]。三相四橋臂逆變拓?fù)涠嗉恿艘粋€(gè)橋臂,一定程度上達(dá)到了抑制輸出電壓不平衡的效果,但同時(shí)也使控制更為復(fù)雜,難以設(shè)計(jì)參數(shù)。組合式三相逆變拓?fù)渲饕怯?個(gè)單相逆變器相互獨(dú)立組合而成,因此在開關(guān)管的使用數(shù)量上會(huì)比較多,增加了控制難度。
本文針對(duì)不平衡負(fù)載下三相逆變器輸出對(duì)稱電壓?jiǎn)栴},建立了三相三線制逆變器的數(shù)學(xué)模型,提出了一種結(jié)合重復(fù)控制和雙環(huán)控制方法的復(fù)合控制方法,實(shí)現(xiàn)了控制方法上的改進(jìn),明顯提高了逆變器帶不平衡負(fù)載能力[8]。
1 三相逆變器數(shù)學(xué)模型
三相逆變器主電路拓?fù)鋱D如圖1所示,主要由電容C、三相濾波電感L以及三相逆變橋構(gòu)成,r為等效阻抗及損耗。其中,逆變器的輸出電壓為UAB、UBC、UCA,電容電壓為Uab、Ubc、Uca,電感電流為iA、iB、iC,負(fù)載電流為ia、ib、ic。
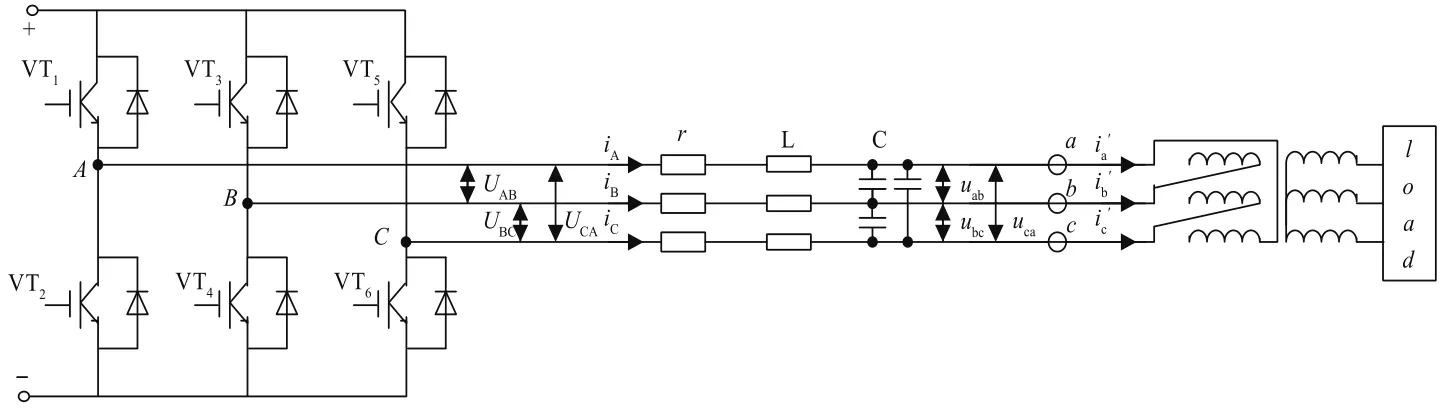
圖1 三相逆變器主電路拓?fù)鋱D
Clark變換能夠得出三相逆變器在靜止坐標(biāo)系下的數(shù)學(xué)模型,再經(jīng)過Park變換,可得:
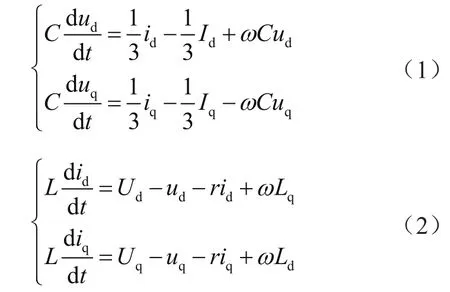
得到d-q旋轉(zhuǎn)坐標(biāo)系下三相逆變器的數(shù)學(xué)模型,由三相靜止a、b、c坐標(biāo)系變換至兩相旋轉(zhuǎn)d-q坐標(biāo)系可以得到矢量圖。
如果將三相逆變器的輸出電壓設(shè)置為:
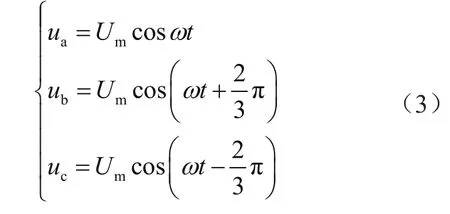
再將逆變器的三相輸出電壓轉(zhuǎn)換至兩相旋轉(zhuǎn)d-q坐標(biāo)系下得:

從上述各個(gè)坐標(biāo)系下三相逆變器的數(shù)學(xué)模型可以看到,逆變器輸出的三相電壓變換至旋轉(zhuǎn)坐標(biāo)系下直軸分量為相電壓峰值,交軸的分量為零,所以只存在直流的分量。
2 逆變器控制系統(tǒng)設(shè)計(jì)
當(dāng)三相逆變器工作在非線性負(fù)載及不平衡負(fù)載時(shí),輸出電壓存在周期性擾動(dòng),可使用重復(fù)控制的方法來抑制這種擾動(dòng)。
2.1 電壓電流閉環(huán)控制器設(shè)計(jì)
雙閉環(huán)控制器主要包括電流內(nèi)環(huán)控制器和電壓外環(huán)控制器兩部分,電流內(nèi)環(huán)控制器能夠使逆變器快速跟蹤實(shí)際輸出電流,從而實(shí)現(xiàn)快速響應(yīng),電壓外環(huán)控制器可以使輸出電壓維持穩(wěn)定。針對(duì)逆變器的耦合現(xiàn)象,采取前饋解耦控制方法對(duì)電壓電流進(jìn)行解耦。采用PI調(diào)節(jié)器來控制電流內(nèi)環(huán)。電流控制方程式為:
電壓控制方程式為:
式中,Kpi是PI調(diào)節(jié)器的比例系數(shù);Kpv是PI調(diào)節(jié)器的積分系數(shù);id*和iq*電流內(nèi)環(huán)的參考電流。由式(5)和式(6)可得:

由式(7)可知經(jīng)過解耦控制后,系統(tǒng)完成了電壓和電流的解耦。在電流環(huán)的控制之下,iq=0,動(dòng)態(tài)過程中id的變化也非常的小。同時(shí)在直流電壓出現(xiàn)大的變化前,iq就已經(jīng)完成了瞬態(tài)過程達(dá)到零的狀態(tài),所以q軸電流帶來的影響可以忽略。此時(shí),由電流環(huán)閉環(huán)的傳遞函數(shù)得:

式中,Tis=L/KpiKPWM。由式(8)可以看出,d-q軸上的電壓和電流之間已經(jīng)不存在耦合關(guān)系,通過上述方程可以畫出這個(gè)解耦合系統(tǒng)的控制框圖,如圖2所示。

圖2 解耦合系統(tǒng)控制框圖
2.2 重復(fù)控制器設(shè)計(jì)
重復(fù)控制在逆變器中有著廣泛的應(yīng)用。該系統(tǒng)的主要控制方法是基于系統(tǒng)內(nèi)模原理,即在重復(fù)控制系統(tǒng)內(nèi)部加入一個(gè)可以對(duì)該系統(tǒng)被控制信號(hào)特性進(jìn)行良好描述的“內(nèi)模”,通過這種方式來解決被控信號(hào)無靜差跟蹤的問題,提高控制精度。重復(fù)控制系統(tǒng)的核心就是內(nèi)模,重復(fù)控制的性能就在于內(nèi)模的建立,相當(dāng)于以一定的周期作為步長(zhǎng)的一個(gè)積分,從而實(shí)現(xiàn)跟蹤給定信號(hào)。若重復(fù)控制系統(tǒng)穩(wěn)定,其約束條件為||1-P||<<1。然而系統(tǒng)在運(yùn)行過程中不能滿足約束條件,因此進(jìn)行改進(jìn),在反饋回路中加入輔助補(bǔ)償器Q替換z-N,以此確保系統(tǒng)的穩(wěn)定性。可得:

式中,N為基波周期采樣次數(shù),能夠加強(qiáng)系統(tǒng)穩(wěn)定性,本文取0.95;z-N為周期延遲環(huán)節(jié);U0(z)為內(nèi)模輸出。在改進(jìn)內(nèi)模結(jié)構(gòu)上增加輔助補(bǔ)償器S和周期延遲環(huán)節(jié)z-N,完整的重復(fù)控制器得以構(gòu)成。但需要注意的是,如果對(duì)象P(z)有單位圓外的零點(diǎn),處于這種狀態(tài)下的補(bǔ)償器是不穩(wěn)定的,會(huì)影響重復(fù)控制系統(tǒng)的穩(wěn)定性。針對(duì)這一問題改進(jìn)補(bǔ)償器的形式,改進(jìn)后的變形形式為:

式中,Kr為補(bǔ)償器增益,用來調(diào)整輸出幅值,一般0<Kr<1;zk為超前環(huán)節(jié),主要作用是補(bǔ)償濾波器相位;S'(z)為低通濾波器,用來消去P(z)過高的諧振尖峰。通過超前環(huán)節(jié)對(duì)內(nèi)模輸出信號(hào)的相位提供補(bǔ)償,接著再串聯(lián)一個(gè)低通濾波器,形成一個(gè)高穩(wěn)定性的控制器。
3 仿真分析
將本文建立的三相逆變電源模型在MATLAB/Simulink仿真軟件上進(jìn)行仿真,進(jìn)而驗(yàn)證所設(shè)計(jì)復(fù)合控制策略的正確性。系統(tǒng)的主要參數(shù)為直流輸入電壓Ui=200 V,濾波電容C=4.7 μF,Rf=0.07 Ω,濾波電感L=11.25 mH,濾波電感的內(nèi)阻R=2 mΩ,額定輸出頻率f0=400 Hz,開關(guān)頻率為10 KHz。
系統(tǒng)兩相負(fù)載運(yùn)行過程中,從0.1 s時(shí)突然增加一相負(fù)載,由復(fù)合控制系統(tǒng)和雙環(huán)控制系統(tǒng)輸出電壓和電流的仿真波形可以看到復(fù)合控制系統(tǒng)在0.1 s前后電壓波形變化不大,即復(fù)合控制系統(tǒng)在缺失一相負(fù)載時(shí)依舊保持輸出電壓平衡。雙環(huán)控制系統(tǒng)在0.1 s前存在著嚴(yán)重的電壓不平衡現(xiàn)象,0.1 s后恢復(fù)平衡。因此,復(fù)合控制系統(tǒng)輸出的波形效果更好。
4 結(jié) 論
本文構(gòu)建了三相三線制逆變器數(shù)學(xué)模型,在分析設(shè)計(jì)了重復(fù)控制以及雙環(huán)控制兩種逆變器控制方法后,提出一種結(jié)合兩者的復(fù)合控制方法。并且通過MATLAB/Simulink仿真試驗(yàn)和多次仿真波形比對(duì),可以發(fā)現(xiàn)逆變器在復(fù)合控制下?lián)碛斜入p環(huán)控制更好的抑制輸出電壓畸變的能力。且逆變器在各種負(fù)載下都能正常工作,且輸出很對(duì)稱的電壓。同時(shí),系統(tǒng)的響應(yīng)速度快,且控制方法結(jié)構(gòu)也相對(duì)簡(jiǎn)單,易于控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32