基于雷達誘餌空間分離的反輻射無人機攻擊航跡分析
2020-05-08 03:15:10許鵬程高洪波
火控雷達技術 2020年1期
關鍵詞:信號
潘 奎 許鵬程 高洪波 張 朋
(空軍預警學院 武漢 430019)
0 引言
有源誘偏系統對抗反輻射武器是一種廣泛采用并且公認為經濟且有效的手段。因此,研究反輻射無人機對誘偏系統的作戰運用顯得尤為重要。文獻[1-4]中基于彈著點分布,對各種布局下的有源誘偏技術有所研究,文獻[5]提出了誘餌空間分離點的概念,文獻[6]基于空間分離點,通過彈著點分布情況,對有源誘偏系統進行了分析。大多文獻在研究彈著點分布時,以空間瞄準點為最終落點。但在真實的有源誘偏系統對抗ARUAV 過程中,ARUAV 到達空間分離點后,某一雷達誘餌脫離導引頭視場,剩余輻射源的合成場方向將發生改變,無人機將調整跟蹤方向,飛行姿態將發生改變。因此,本文基于無人機導引頭測向視場角的約束條件,分析誘餌空間分離點,對無人機末制導攻擊全過程航跡建模,更符合無人機實戰攻擊過程,為無人機攻擊目標提供理論依據。
1 誘餌誘偏下,ARUAV測向定位理論推導
圖1為雷達及誘餌誘偏下比相體制導引頭測向定位示意圖。如圖所示,假設ARUAV區域Ⅰ入侵,在tk時刻機體的偏航角、俯仰角分別為ξ、γ,天線的框架角為θ。由于ARUAV到輻射源距離遠大于自身長度,可近似認為天線陣中心即陣元天線P1的位置坐標為ARUAV的位置坐標Ak。

圖1 導引頭測向定位示意圖
設d為導引頭長基線長度,則長基線端各陣元天線在天線坐標系O-XpYpZp中坐標分別為
(1)
則tk時刻,導引頭的陣元天線j在大地坐標系O-XYZ中位置坐標為
(2)
同理,假設輻射源的坐標為Di=[xiyizi]T,則在tk時刻,輻射源在天線坐標系中的位置為
(3)
其中,i=0為雷達信號,那么在tk時刻,輻射源i與導引頭陣元天線j的距離為
(4)
假設在有源誘偏系統中,陣元天線j接收到信號可表示為
(5)
其中,Ei為輻射源i的電場大小,誘餌閃爍時,Ei交替變為0;ω為輻射源角頻率,φi為輻射源i信號的初始相位,φij為輻射源信號i到達陣元天線j和相位延遲。
φij=2πRij/λ
(6)
陣元天線j接收信號合成電場強度見式(7)。

(7)
其中:
由上述關系可以推導出陣元天線j接收到的信號合成后的幅度和初相為
(8)
(9)
導引頭陣元天線j接收信號的合成電場相位為
(10)
經獨立的變換、放大后,進行鑒相測量后得到干涉儀相位差分別為
Δφ12=Φ2-Φ1
(11)
Δφ13=Φ3-Φ1
(12)
根據公式(10)、(11)和(12)可求出合成波與天線俯仰面天線軸、方位面天線軸和天線陣中軸線的夾角分別為
θ12=arccos(λΔφ12/2πd)
(13)
θ13=arccos(λΔφ13/2πd)
(14)
(15)
沿著方向θ12、θ13和θ0,就能決定一條直線,該直線與地面的交點D為導引頭在tk時刻所測得的輻射源位置,即導引頭的定位瞄準點[7]。
假設定位瞄準點D到ARUAV距離為R,則瞄準點在天線坐標系中的坐標為
D(P)=[Rcosθ0Rcosθ12Rcosθ13]T
(16)
則合成目標的方位角和俯仰角分別為
(17)
根據求出的測向角度,計算出合成目標視線相對于導引頭軸向的偏差角。
2 基于誘餌空間分離的ARUAV末制導階段飛行建模
根據無人機飛行控制原理,目標視線相對于導引頭軸向的偏差角是無人機和導引頭調整跟蹤的依據。飛行航跡控制需考慮無人機在每一時刻的位置、速度矢量及導引頭測向偏差角和天線視場內輻射源數量。由于ARUAV在姿態調整中保持水平無傾斜轉彎,攻擊方向為其轉彎時形成的切線方向[8]。因此,飛行姿態調整可以近似看成橫向和縱向的圓弧運動,如圖2所示,其運動軌跡為橫向和縱向運動的合成。
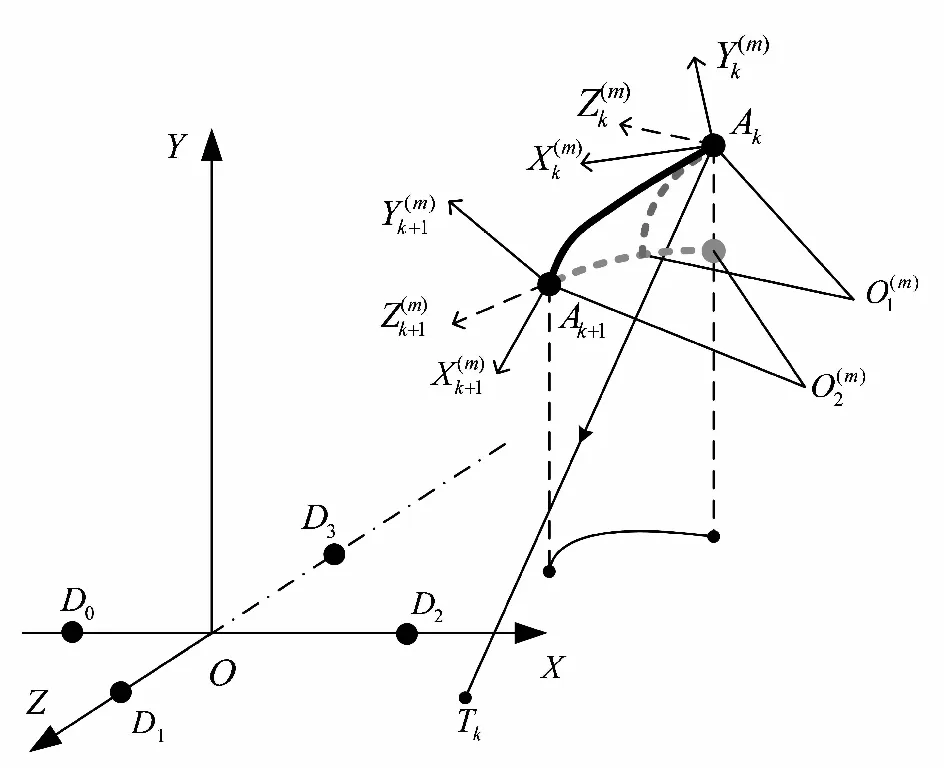
圖2 無人機在飛行跟蹤階段飛行狀態示意圖
假設ARUAV導引頭測向周期為Δt,末制導測角采樣周期為ΔT。無人機待機速度為V,俯沖階段加速度為a,最大橫向過載為nmax1,最大俯沖向下過載為nmax2,天線最大跟蹤角速度ωmax。
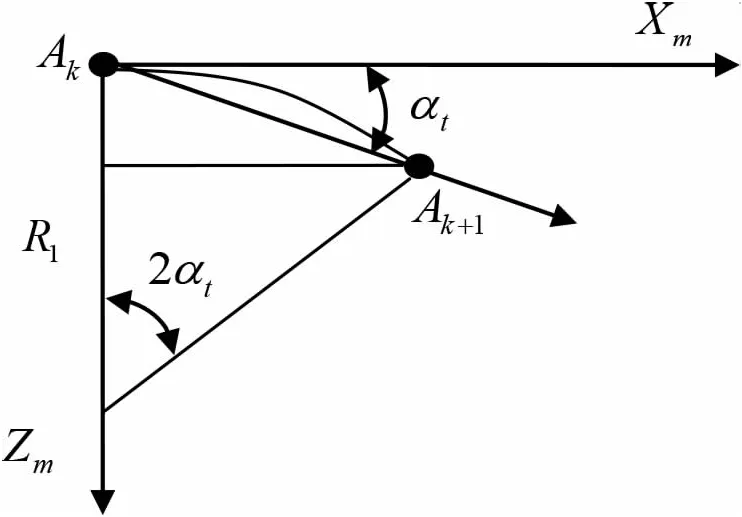
圖3 無人機橫向運動示意圖
在ΔT時間內,ARUAV橫向調整位移為
(18)
同理,在ΔT時間內,ARUAV縱向調整位移為
(19)
其中,R2=V2/(n2g)。
以tk時刻機體坐標為參考,ARUAV在ΔT時間段機體調整位移為
(20)
綜合上述推導,可以計算得出tk+1時刻ARUAV所在空間位置坐標
(21)
飛行速度方向和天線的框架角分別為
(22)
ARUAV在對多誘餌源的攻擊過程中,如圖4所示,由于導引頭視場角限制,當ARUAV俯沖攻擊到某一點時,將有輻射源脫離導引頭的視場,ARUAV又將跟蹤視場范圍內的剩余輻射源合成場相位中心,整個末制導過程實際上是跟蹤多點源合成場到單點源的飛行過程。

(23)
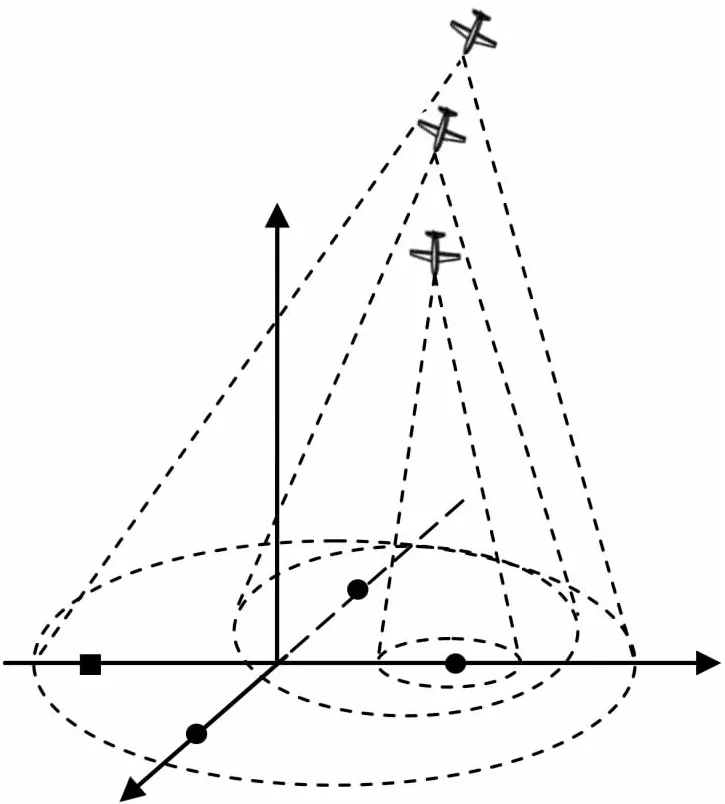
圖4 輻射源脫離導引頭天線視場示意圖
(24)
各輻射源達到臨界位置條件是
σki=Δθ/2
(25)
根據每個時刻的臨界條件,可以判斷輻射源是否在導引頭視場范圍內。
3 仿真驗證與結果分析
ARUAV性能參數:飛行高度為2000 m;水平調姿階段飛行速度為50 m/s;俯沖攻擊階段速度加速度為0.2 g;橫向機動過載為3 g;俯仰向下過載為5 g;殺傷半徑為30 m。導引頭視場角范圍為60°,末制導測角采樣周期均為30 ms。
有源誘偏系統參數:三誘餌與雷達采用菱形布陣方式[10],相互間距約為300 m。在該布陣方式下,誘餌信號“包裹”雷達信號,保證導引頭接收到的目標信號的形式始終為“誘餌包裹”型雷達信號。無論無人機從什么方向入侵,都僅能跟蹤誘餌信號,從而對雷達起到了較好的保護作用。根據以上原則,我們設置其空間坐標為:假設雷達(-260,0,0),誘餌1(0,0,150),誘餌2(260,0,0),誘餌3(0,0,-150)。
3.1 單誘餌誘偏下ARUAV攻擊航跡
圖5為無人機在末制導階段的飛行示意圖,實線為無人機在800m高度處以最大向上過載執行恢復拉起操作,虛線為無人機俯沖攻擊過程。從仿真可以看出,在誘餌1單獨工作條件下,ARUAV能夠準確命中目標和在800m處丟失目標后能夠恢復拉起,證實了該模型的正確性。
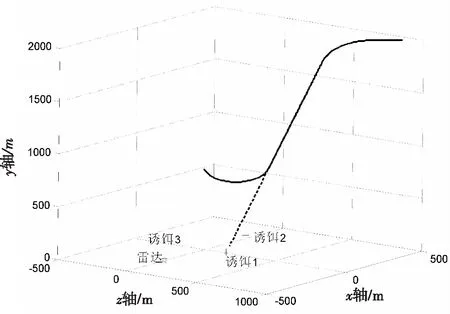
圖5 無人機末制導階段飛行示意圖
3.2 相參誘餌空間分離的ARUAV攻擊航跡
假設ARUAV分別從誘餌1、2和1、3連線區域入侵,入侵角分別為-170°和70°。
表1 三誘餌誘偏下ARUAV關鍵點位置數據列表

AURAV位置/m入侵角-170°入侵角70°誘餌1脫離天線視場(123.2,282.7,3.0)(66.1,66.9,105.7)誘餌2脫離天線視場(158.2,385.5,8.4)(69.9,280.7,-43.3)誘餌3脫離天線視場(48.4,129.9,-24.9)(53.3,390.9,-87.5)爆炸點(-20.8,0,-57.5)(51.0,0,160.8)
從圖6和表1可以看出:
1)無人機從不同區域入侵,在一定高度上導引頭可以搜索跟蹤到三誘餌的合成信號,并能引導無人機跟蹤到配誘餌雷陣地上方,完成末制導階段的姿態調整和俯沖攻擊。
2)當無人機俯沖攻擊到空間某點處,雷達誘餌脫離視場,導引頭視場內的合成場方向改變,無人機改變攻擊方向。最終,導引頭視場角內只剩下單誘餌,但受無人機自身機動性能制約,該誘餌也將脫離導引頭視場,無人機將按照在最后一個誘餌分離點處的測向數據,調整攻擊姿態。由于此時高度偏低加之無人機過載有限,最終在爆炸高度允許范圍內引爆。無人機在誘餌空間脫離點后,航跡改變較為明顯。
3)在攻擊配有3相參誘餌的雷達過程中,當無人機入侵方向不一樣,誘餌分離順序和高度不同,最終爆炸點位置也在變化。因此,入侵方向對ARUAV最終爆炸點位置有著重要影響。
圖6 相參誘偏時無人機末制導攻擊航跡圖
3.3 閃爍誘餌空間分離的ARUAV攻擊航跡
圖7為誘餌脈沖信號前沿交替靠前時間間隔為1 s時,ARUAV的攻擊航跡圖,虛線為航跡在水平面上的投影,結合表2的數據可以看出:
表2 三誘餌閃爍條件下ARUAV關鍵點位置數據列表

-170°70°誘餌1脫離天線視場(228.3,276.4,68.5)(120.7,279.2,23.6)誘餌2脫離天線視場(208.8,190.7,61.5)(124.2,227.7,30.3)誘餌3脫離天線視場(246.3,337.5,72.7)(104.9,535.7,-34.5)爆炸點(165.2,0,47.9)(139.6,0,59.7)
1)ARUAV的攻擊軌跡均產生了較大的曲折波動。這是因為,在誘餌閃爍誘偏模式下,導引頭天線測向數據將隨著閃爍的變化而跳變,使導引頭無法一直跟蹤瞄準任一輻射源,從而通過控制無人機機體不斷調整跟蹤攻擊姿態,造成無人機在多誘餌間隨著閃爍節拍的轉換而產生追擺。
2)在攻擊前期,閃爍誘餌均在天線視場范圍內;在俯沖攻擊的最后階段,誘餌才開始先后脫離天線視場。
3)入侵方向不同,對ARUAV的誘偏效果也有差異,最終落點位置也不一樣。
4)在相同入侵角,不同的誘偏模式下,誘餌分離時序不一樣,ARUAV最終落點也不一樣。
圖7 閃爍誘偏時無人機末制導攻擊航跡圖
4 結束語
隨著無人機不斷逼近配有多誘餌的雷達陣地,多誘餌會逐漸脫離導引頭視場,導致ARUAV改變跟蹤飛行方向。本文基于誘餌空間分離建立了ARUAV末制導階段飛行模型,在相參誘偏和閃爍誘偏下對空間分離點進行仿真分析,仿真過程更加貼合實戰。該模型對于研究ARUAV攻擊配多誘餌雷達,更具有理論指導意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
