動態無線充電在智能巡檢機器人中的應用
2020-05-08 07:36:58盧英建魯芷鑫
科技與創新 2020年8期
盧英建,魯芷鑫
動態無線充電在智能巡檢機器人中的應用
盧英建,魯芷鑫
(武漢理工大學 信息工程學院,湖北 武漢 430070)
隨著無線充電技術在小功率產品上的使用越來越成熟,巡檢機器人等中、大功率設備無線充電技術的應用前景也越來越受到人們的重視。為解決巡檢機器人當前靜態無線充電方式的弊端,提出一種動態無線充電在智能巡檢機器人中的應用系統。在該應用系統中選取感應耦合的電能傳輸方式,采用高頻高壓配電-低壓恒流激勵的導軌模式。控制器通過對系統各節點電壓、電流等參數的實時監控判斷出系統當前的運行狀態并調整輸出參數,從而給巡檢機器人進行動態、穩定供電。
無線充電;分段導軌;巡檢機器人;充電臂
1 概述
1.1 目前巡檢機器人的充電方式
目前巡檢機器人的充電方式主要分為有線充電和無線充電兩種。而無線充電方式中多為固定地點充電,控制系統通過監控機器人蓄電池的電壓,確定當前是否需要充電。當檢測到欠壓時,機器人自主導航回到充電房附近,同時使用激光測距儀和視覺識別的方式,實現對充電座的定位,通過調整機器人位姿或控制充電臂,實現機器人的充電[1]。
1.2 當前充電方式存在的問題
對于現有的有線充電方式來說,外露的充電接口容易出現老化,所以安全性較差,而且只能在固定的充電地點進行充電。對于目前的靜態無線充電方式來說,充電的過程同樣需要到固定的充電樁才能完成充電,所以浪費了大量的時間,降低了續航能力,工作的巡檢機器人的工作效率也因此大打折扣。同時,無論是傳統的有線充電方式還是現有的靜態無線充電方式,巡檢機器人都需搭載一定數量的電池組,如果追求高續航能力就會增加自身設備重量,從而增加了能量損耗。
1.3 無線充電的優勢
相比于傳統的有線充電方式,無線充電方案是將發射線圈埋入地下,不占據地上空間且無外漏接口,具有運行安全、便捷靈活、維護成本低、用戶體驗好等優點[2]。而相比于具有固定充電地點的靜態無線充電方式,動態無線充電可以不受限于充電的地點,在設備工作的過程中即可完成供電,提高設備的工作效率。同時,動態無線充電方式可以通過減少車載電池的搭載量實現設備的減重,從而進一步降低能量損耗,提升設備行駛里程[3]。
2 方案設計
2.1 感應耦合電能傳輸
感應耦合電能傳輸方式是利用電磁感應原理來實現的,其結構如圖1所示。裝置的基本構成為4部分:初級能量變換機構、能量傳輸機構、次級能量拾取機構和反饋機構[3]。電網電壓作為初級能量變換機構的輸入電壓,經過整流橋進行整流和高頻逆變,先將電網中的工頻交流電轉換為直流電,然后經過高頻逆變電路將直流電轉換為高頻交流電。能量傳輸機構等同于松耦合變壓器。原邊線圈通過交變磁場的作用,將電能傳輸到副邊線圈。能量拾取機構為松耦合變壓器的副邊線圈,將接收到的高頻交流電通過整流、穩壓,從而轉換為直流電,給后級負載穩定地供電,在巡檢機器人中,負載為蓄電池和其他耗能裝置。反饋機構對各參數進行采樣,把采集到的信號反饋給控制調節單元,從而控制輸出的驅動信號頻率。
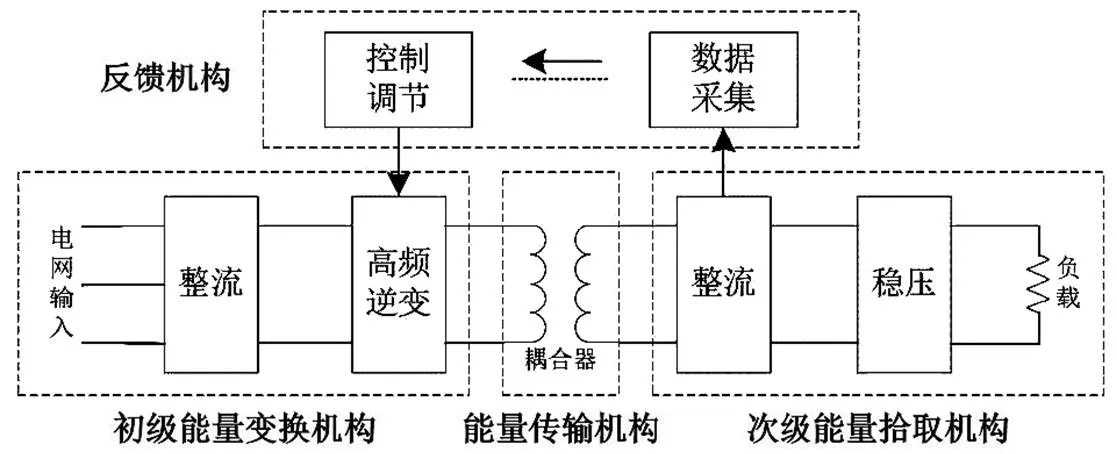
圖1 感應耦合傳輸裝置結構圖
2.2 分段供電導軌模式
本系統采用高頻高壓配電-低壓恒流激勵的分段導軌模式,能量傳遞引導件被劃分為N段,并且每個分段都配置有轉換器和諧振補償網絡。
分段供電導軌模式的結構如圖2所示。工頻電源經過功率轉換裝置轉換為高頻的交流電,由高頻升壓器進行升壓,然后注入配電軌進行傳輸(高頻和高壓配電);每個導軌部分都配備有高頻降壓轉換器,用于將配電導軌中的高頻高壓交流電轉換為低壓大電流交流電,然后將其傳輸到后續的換向和補償鏈路。

圖2 高頻高壓配電-低壓恒流激勵導軌結構圖
除能流的開關控制外,轉換器還具有恒定電流控制作用,從而在勵磁引導件中產生更大的恒定勵磁電流(低壓恒流勵磁),增強了勵磁導軌的功率發射能力,確保了功率傳遞的穩定性。
3 系統硬件設計
3.1 控制器
本系統采用TI公司生產的MSP430作為控制器,其內部有2個16位定時器,而且可以實現定時開關中斷、輸出高頻PWM信號、輸入捕捉等功能。
該器件可為逆變器電路提供高頻PWM和SPWM驅動信號。選擇該處理器作為系統主控制器的主要原因是其低電壓啟動和超低功耗。它的啟動電壓低至1.8 V,在正常工作模式下僅需要230 μA電流。在待機模式下,工作電流低于0.5 μA,這大大降低了控制器帶來的能耗,并增強了系統的耐用性。
3.2 DC-AC逆變電路
DC-AC逆變電路是AC-DC-AC變換方式的重要環節,在初級能量變換機構中,需要將整流、濾波后的直流電壓轉換為高頻交流電壓。
3.2.1 選型依據
全橋式逆變電路相對于半橋式電路具有開關管承受的電壓低、傳輸功率高、可以直接通過能量注入控制策略和移相控制實現對輸出功率的調節、可以自由選擇諧振補償方式等優點。由于動態無線充電系統在巡檢機器人的應用中要求的傳輸功率較大,因此本系統選用了全橋式逆變器的電路結構。
3.2.2 電路結構
全橋逆變電路主要分為單極性和雙極性兩種控制方式。單極性控制方式下的全橋逆變器在工作時,其過0點會有一個較大的振蕩,影響輸出高頻交流電的質量;而雙極性控制方式是規定對角的一對MOS管為同步性開關,而同一橋臂的上下管之間為互補性開關。雙極性控制方式相對于單極性來說控制相對簡單,因此本系統的逆變電路選用雙極性的控制方式。
全橋逆變電路的主電路拓撲由4個功率MOS管和多個電阻、二極管組成,其具體結構如圖3所示。MSP430控制器產生的高速PWM波由驅動器進行功率放大,然后接入MOS管的柵極,從而控制兩個橋臂上MOS管的導通與關斷。當控制器輸出有一定占空比變化規律的SPWM波時,即可將輸入的直流電壓變換為具有一定頻率且波形成正弦變化的交流電壓。

圖3 全橋逆變電路結構圖
3.2.3 控制方式
全橋逆變電路一般采用SPWM波的控制方法,而SPWM又分為單極性與雙極性兩種控制方式。在本系統的逆變電路中選取單極性SPWM控制方式。
在每半個周期內,同一橋臂的兩個MOS管中,只有一個MOS管按脈沖系列的規律來進行開通與關斷工作,另一個則完全截止;而在另外半個周期內,兩個MOS管的工作狀況則恰好相反[4]。在此工作狀態下,流經發射線圈的則為正負變化的交變電流。
3.3 整流電路
整流電路的功能是將接收線圈中的交流電變換成為可給設備供電的直流電。整流電路的輸出為脈動的直流電,在電路后方接入一個大容量的極性電容進行濾波,從而得到一個相對平緩的直流電壓。
整流電路采用常見的橋式整流電路,由4個功率二極管組成。4個二極管兩兩對接。正弦波的正半部分輸入時2個二級管導通,輸出為正;正弦波的負半部分輸入時,另外2個二級管導通,由于二者是反接的,所以輸出還是得到正弦波的正半部分。橋式整流器相對于半波整流對輸入正弦波的利用效率高1倍,具有比較好的適用性。
3.4 DC-DC穩壓電路
3.4.1 選型依據
系統接收線圈輸出的電壓值相對較低,需要通過提高電壓值才能給后級負載端供電。考慮到系統效率以及穩定性,選用以BOOST電路拓撲為基礎的升壓電路作為整流電路后的穩壓電路。
BOOST升壓電路通過控制器產生的高速PWM波來控制開關管的通斷。該電路可根據供電的不同狀態在恒壓模式和恒流模式中切換。例如在給機器人的蓄電池充電時首先進行恒流充電;在充電一段時間后,當監測到電池電壓達到一定的安全閾值時即切換為恒壓模式,降低充電電流,使電池的電壓不會超過規定的安全范圍,從而在保證充電效率的同時保護電池,延長電池使用壽命。
3.4.2 電路結構
BOOST升壓電路的主電路拓撲主要由2個功率MOS管和1個功率電感組成,其具體結構如圖4所示。同全橋逆變電路中的控制MOS管開關的方式一樣,2個開關管的開啟與關斷也是由接入到柵極的PWM信號來控制的。
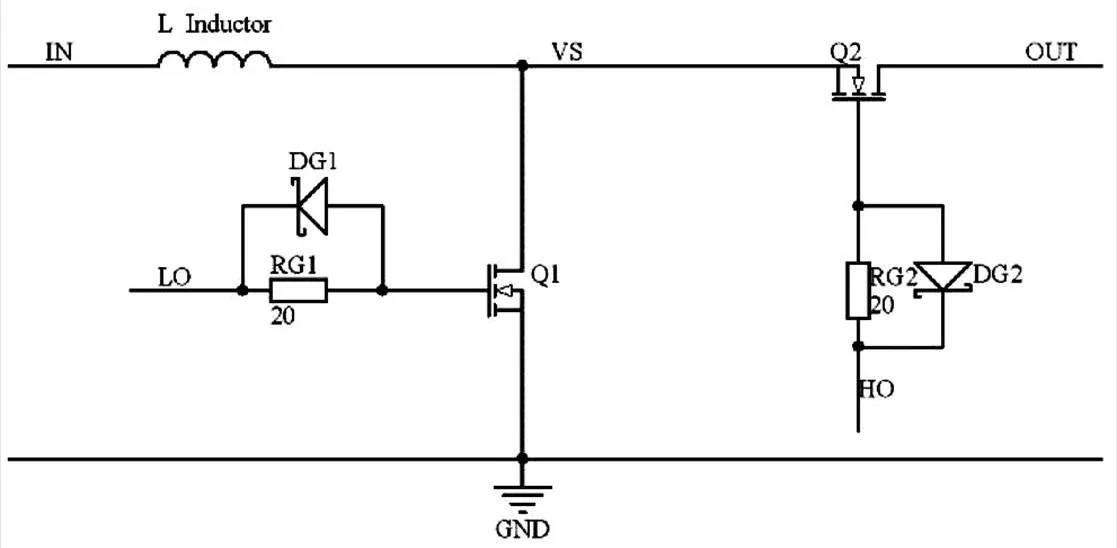
圖4 BOOST升壓電路結構圖
在BOOST電路中,控制上下兩個MOS管開關的PWM信號的占空比為互補關系,即任意時刻一個MOS管為開啟狀態、另一個為關斷狀態。控制器根據當前電路狀態調整兩路PWM信號的占空比,從而實現調節輸出電壓的大小。同時控制器通過對輸出電壓和電流的實時監測來調整PWM信號,實現恒壓供電模式、恒流供電模式以及二者之間的轉換。
4 系統程序設計
4.1 發射端控制器
發射端控制器的主要功能是控制全橋逆變器將直流電壓轉換為高頻的交流電壓。根據全橋逆變器的電路結構可知,發射端控制器需要輸出SPWM波來控制4個功率MOS管,實現電壓的變換。
在本系統中SPWM波的產生方式是查表法。把半周期正弦波在時間軸上等分成多份,這些部分的面積為先增大再減小的趨勢變化,面積呈對稱分布;如果每一部分使用面積對應相等、等寬但不等幅的矩形脈沖來代替,則這些脈沖的幅度就會呈現先增高再降低的趨勢,脈沖高度兩邊對稱。如果被等分的正弦波與橫軸所圍成的區域用面積對應相等,等幅且不等寬的矩形脈沖來代替,則這一系列脈沖的寬度就會依次呈現出先變寬后變窄、寬度兩邊對稱的有規律的變化。
4.2 接收端控制器
MSP430控制器可通過ADC采樣采集電壓信號。在BOOST升壓電路輸出端的電壓和電流采集電路可以將輸出端的電壓值和電流值變換為控制器ADC可采集的電壓信號。控制器通對該電壓信號進行實時采集,通過一定的計算即可得到當前BOOST電路輸出端的電壓值和電流值。
在恒壓供電的方式下,控制器會判斷當前電壓值是否等于設定值(例如在給蓄電池充電時,該電壓設定值為電池的安全電壓閾值),如果二者不相等,則使用PID運算改變控制器輸出PWM信號的占空比大小,從而改變電路的輸出電壓值,直至其實際值與設定值相等。
在恒流供電的方式下,與恒壓控制方式類似,控制器會判斷當前輸出端電流值是否等于設定值(例如在給蓄電池充電時,該電流設定值為電池的安全充電電流)。如果二者不相等,則通過PID運算改變輸出PWM信號的占空比大小,從而調節輸出電壓值的大小,通過這種方式來維持充電電流的恒定,直至監測到電壓達到安全閾值,切換到恒壓供電 模式。
5 結束語
本文描述了動態無線充電在智能巡檢機器人中的一種應用,在一般無線充電方式的基礎上引入分段導軌模式,從而實現動態無線充電。本文所描述的應用可以使巡檢機器人脫離固定的充電樁,在工作過程中即可不斷供電,從而提高巡檢機器人的工作效率,對實際的生產活動具有一定的積極意義。
[1]黃山,吳振升,任志剛,等.電力智能巡檢機器人研究綜述[J].電測與儀表,2020(2):26-38.
[2]趙爭鳴,劉方,陳凱楠.電動汽車無線充電技術研究綜述[J].電工技術學報,2016,31(20):30-40.
[3]白嘯東.電動汽車動態無線充電系統的設計與實現[D].天津:天津工業大學,2018.
[4]喻衍.一體化三相逆變陀螺電源的設計研究[D].天津:天津大學,2007.
TP242
A
10.15913/j.cnki.kjycx.2020.08.070
2095-6835(2020)08-0157-03
盧英建(1999—),男,通信工程專業本科在讀。魯芷鑫(1999—),男,電氣工程專業本科在讀。
〔編輯:張思楠〕
