構架航線在大比例尺航空攝影測量中的應用探討
2020-05-09 10:35:35萬阿芳
國土資源導刊 2020年1期
關鍵詞:區域
萬阿芳
摘 ?要 ?本文介紹了Imagination(暢想)空三加密軟件在有構架航線情況下采用GPS輔助光束法區域網平差進行空三加密在大比例尺測圖中應用和精度分析,以數字醴陵地理信息基礎工程建設生產為例,并對實施構架航線進行空三加密過程中遇到問題提出了實用建議。
關鍵詞 ?航空攝影測量;構架航線;GPS輔助光束法區域網平差;空三加密
中圖分類號:P231 ? ? ? ? ?文獻標識碼:A
Abstract: This paper introduced the application of the software Imagination in aerial triangulation of large-scale topographic mapping using GPS-supported bundle block adjustment under the constraint of control ship, and the measurement precision is analyzed. Taking the geographic information foundation project of digital Liling for example, some practical suggestions are presented to solve the problems encountered in the practice of the aerial triangula?tio?n under the constraint of control strip.
Keywords: ?aerial photogrammetry; control strip; GPS-supported bundle block adjustment; aerial triangulation
1 ?引言
近年來,隨著航空攝像測量技術的不斷發展,構架航線在航空攝影中已開始被普遍使用。常規的“4條航線乘15條基線”是在區域網布設像控點,區域往中間增加一個檢查點的布點方案,像控點布設需要滿足6度重疊情況,對位置的要求較高,且平面和高程的精度直接影響內業的精度。而構架航線空三加密是在區域網的四個角各布設一個平高控制點,同時在區域網兩端近似垂直于航線方向敷設兩條構架航線,逐條航線進行航攝漂移誤差改正,可大量減少對地面像控點數量的需求。
在實際生產中,構架航線的敷設對航飛質量要求較高,且目前大多生產應用的空三加密軟件如Inpho軟件,是基于POS/IMU的GPS輔助空中三角測量方法,對POS數據精度要求較高,需要地面基準站進行差分運算,但由于IMU的測角精度較低,導致仍需要較多地面控制點參與平差解算來保證空三加密精度。因此,在數字醴陵測區我們用Imagination空三加密軟件軟件,利用機載GPS/BD輔助技術,不使用POS數據中的3個角元素,將航空攝影時間參數作為有效觀測值參與區域網平差進行空三加密,來對構架航線在大比例尺航空攝影測量中的應用進行探討和分析。
2 ?構架航線鋪設及方案
2.1 實驗區概況
實驗區為數字醴陵地理信息基礎工程建設項目中一個加密分區。醴陵市處于東經112°-114°,北緯26°-28°,地處湖南省東部,羅霄山脈北段西沿,位于長沙,株洲,湘潭“金三角”經濟區東南部,地貌以山地,丘陵和崗地為主。該分區面積約1200平方公里,為丘陵地形,北部以山區為主。
2.2 航攝情況和測區參數
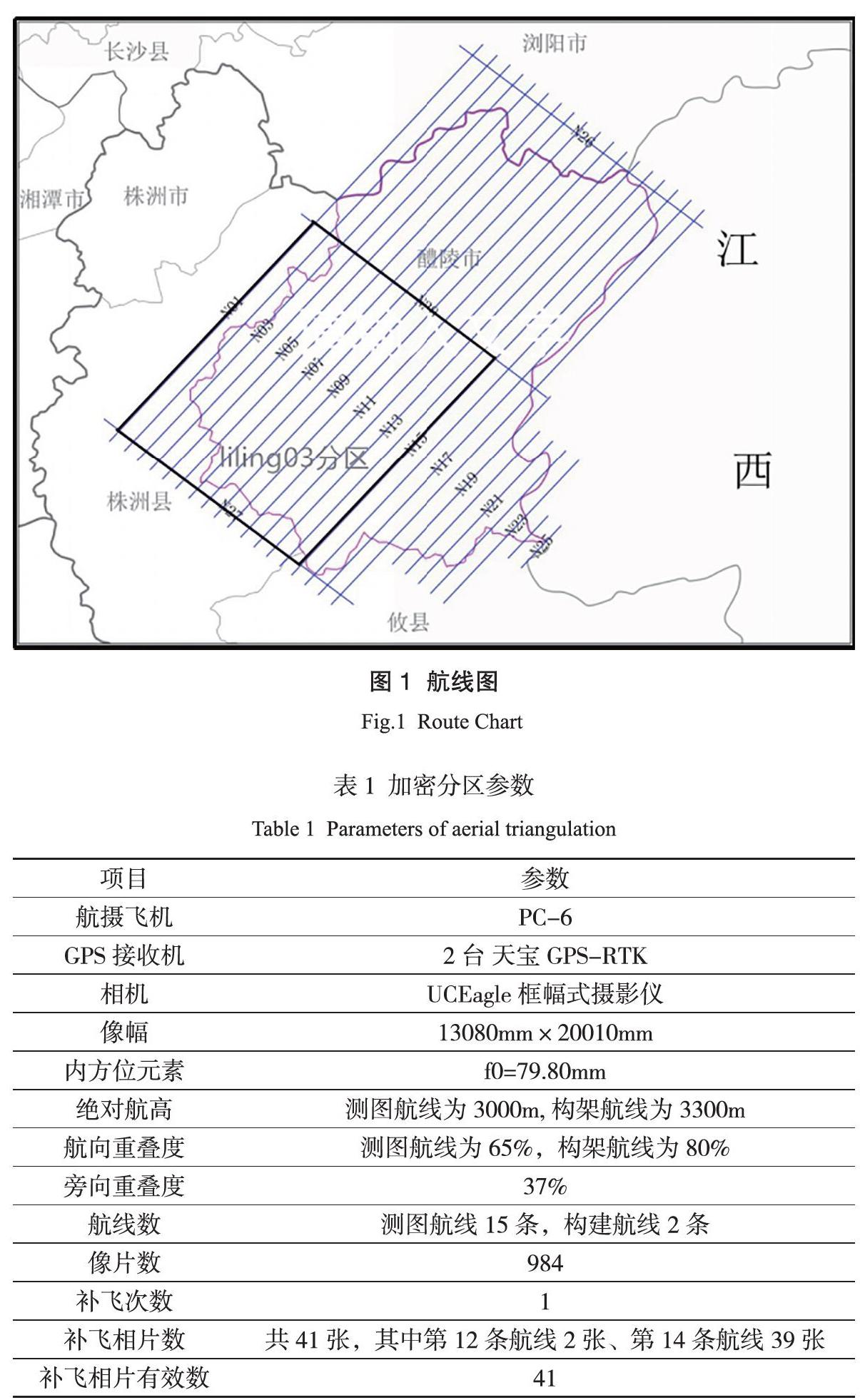
本實驗區有測圖航線N01-N15和構架航線N27-N28共17條航線,其中區域內第12、14條航線共有兩條補飛航線,如圖1:
醴陵攝區攝影使用PC-6飛機搭載UCEagle航攝儀進行,采用IMU/GPS輔助航空攝影,無地面基站,其相關參數如表1。
2.3 像控布點情況和構架航線航攝要求
2.3.1 ?像控布點
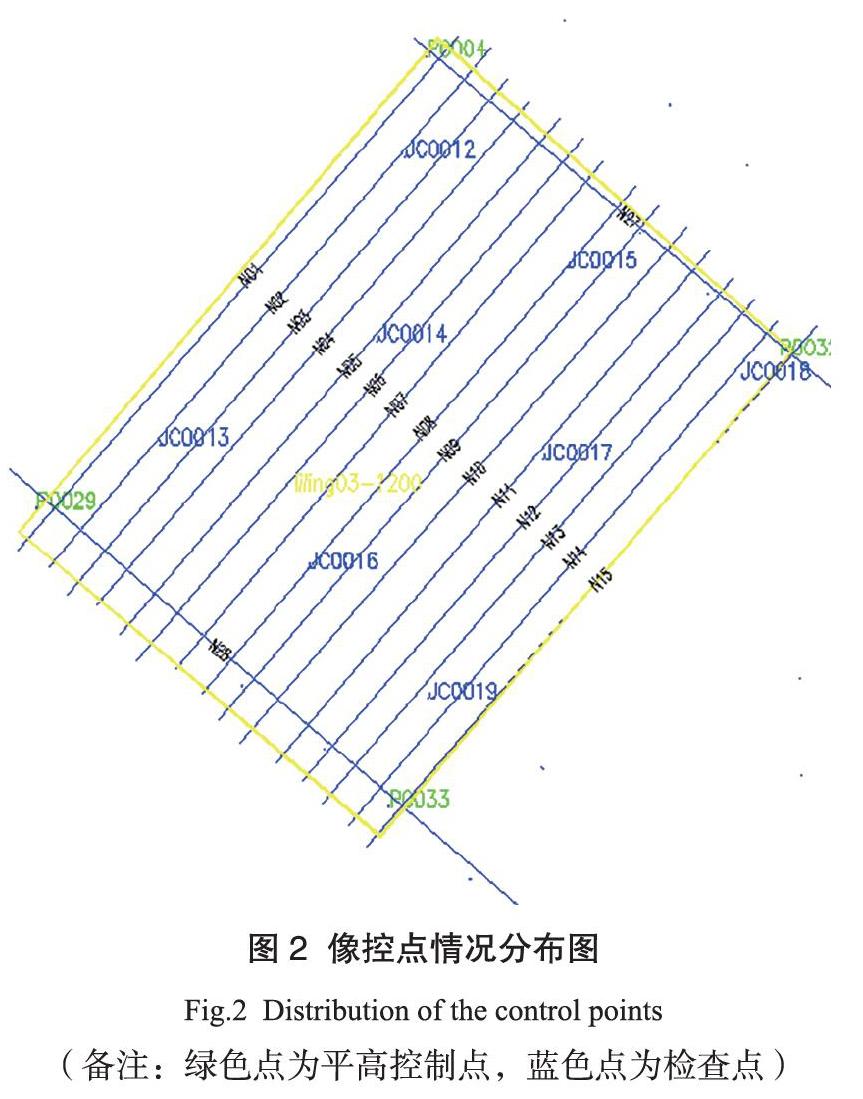
只需在構架航線與測圖航線的交點區域處布點就行,不用考慮常規像控布點的6度重疊情況。本實驗在加密分區四角布設一個平高控制點,在加密分區中間均勻布設檢查點,共布設4個平高像控點,8個檢查點。具體布點方案如圖2。
2.3.2 ?構架航線航攝要求
構架航線的攝影比例尺應比測圖航線的攝影比例尺大25%左右,航向重疊度不少于80%,以保證隔號像片能構成正常重疊的立體像對。同時構架航線間的交叉銜接處,要保證有不少于四條基線的相互重疊。構架航線如其本身出現局部的相對漏洞或有其他缺陷(如:云影、脫膜、斑痕等),在不影響整條航線內業加密選點和模型連接的情況下可不補攝。凡需要補攝時,應整條航線重攝。構架航線由于相機脈沖輸出裝置故障引起的時標信號丟失,在一條航線上連續不超過三張時,不必補攝,當構架航線出現GPS攝站丟失時,應整條航線重攝。
2.4 空三加密流程
將整理好的含線元素和時間元素的POS數據導入Imagination軟件,自動創建測區,根據相機檢校報告設置相機基本參數、編輯航線創建立體相對、內定向、提取連接點、根據像控點點之記精準觀測每個像控點的點位進行像控點量測、運行GPS輔助光束法區域網平差,查看平差計算結果生成的各個記錄文件。
這次實驗中,構架航線和測圖航線由于航高不一致,且航線存在旋偏,構架航線和測圖航線影響同名點匹配較差,連接點提取數量不夠,存在誤差較大的連接點,需要剔除后手工添加再進行誤匹配探查。所以,在以后的構架航線的機載GPS輔助空三加密中,重點要注意架航線與測圖航線之間的連接點分布是否合理,是否每個標準點位都有連接點。
2.5 ?精度分析
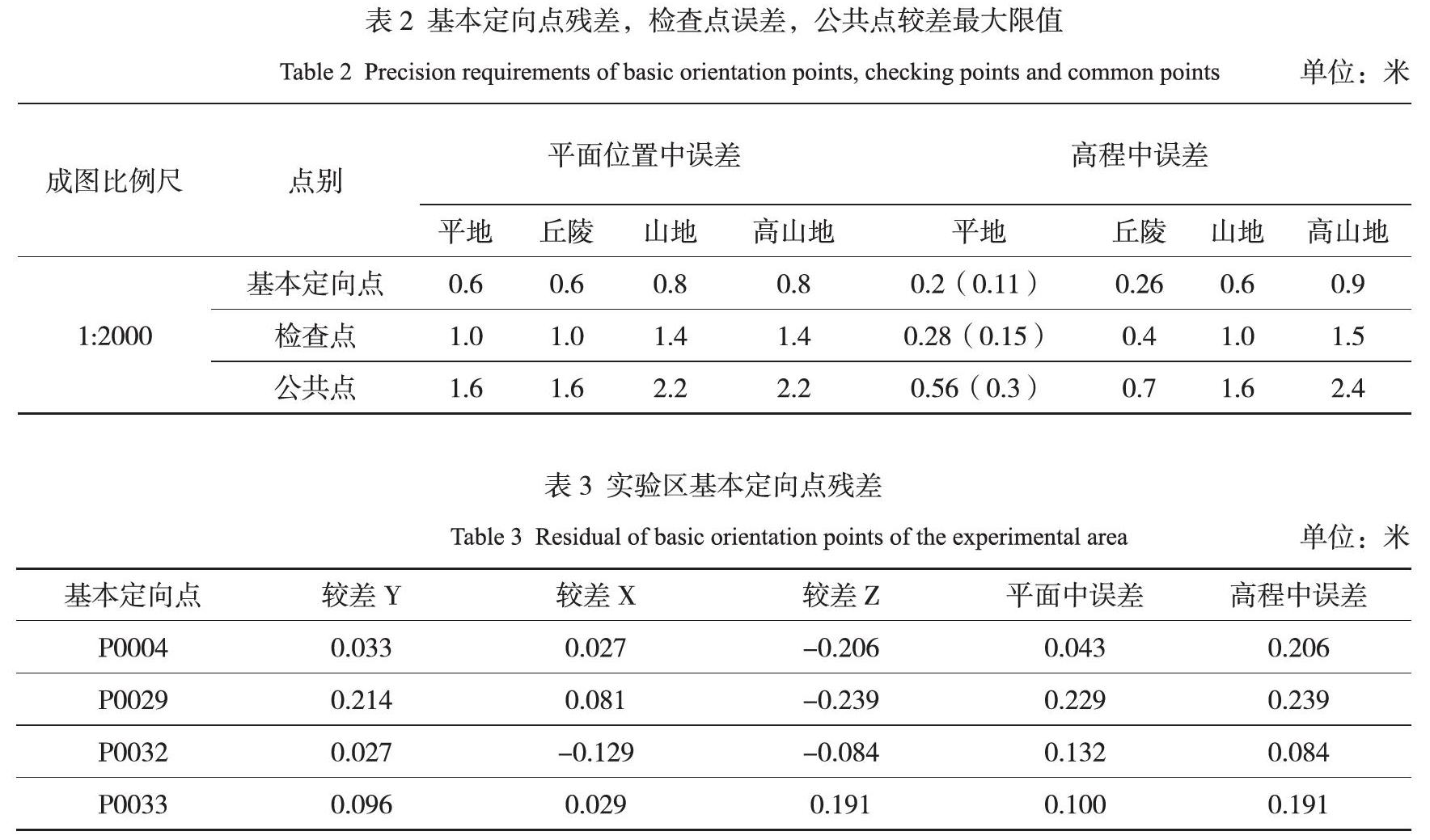
本實驗測區生產1:2000大比例尺地形圖數據,按照技術設計要求,空三精度要求如表2所示:
經過平差軟件計算,得到空三精度報告如表3。
(1)基本定向點殘差
由表3可見,控制點鐘平面中誤差最大為0.229米,允許誤差0.6米,高程中誤差最大0.239米,允許誤差為0.26米,均滿足規范要求。
(2)檢查點精度情況
由表4可見,本加密分區檢查點平面誤差最大值0.464米,允許誤差1.0米。高程最大誤差為0.269,允許誤差為0.4米。均滿足規范要求。
(3)外業精度檢測情況
為進一步驗證空三加密成果的精度情況,恢復立體模型,在范圍內選取部分地物紋理清晰,特征明顯的位置,采集同名點,進行外業實測,比較兩者之差。具體外業檢測點情況分布如表5所示:
外業采用GPS-RTK采集了22個特征點,最大平面差值為 0.507 米,允許誤差為2.4米,最大高程差值為 0.354 米,允許誤差為 1米,均滿足規范要求。
3 ?有構架航線空三加密過程經驗探討
(1)構架航線必須一次性進行,不能補飛。測圖航攝航線每條補飛不宜超過2次,否則必須增加像控點。在本次實驗的另一個加密分區,因有多條補飛航線,只在分區四角布設一個平高點的方法進行空三加密時,加密的高程精度超出了限差。之后在補飛航線與原航線重疊處,添加部分像控點后才使得平差結果滿足精度要求,所以在平時的空三加密作業中要特別注意補飛情況。
(2)區域網中間的檢查點最好布設在地形變換處和補飛航線與原航線重疊區域。
(3)注意連接點情況。把一些誤差較大的連接點參與到平差計算,會影響局部區域的平差精度。在這次實驗中,我們發現構架航線與測圖航線間連接點匹配較差,補飛影像與首次航攝的影像之間連接點匹配較差,植被覆蓋區域或者紋理不明顯的位置自動提取的連接點誤差較大、大面積水域的情況下缺少連接點。
4 ?總結
通過檢測數據表明,采用Imagination空三加密軟件,有構架航線下的情況下采用少量像控布點,利用GPS輔助光束法區域網平差實行空三加密成果完全滿足大比例尺成圖的精度要求,可以減少大量外業工作量,降低生產成本同時也縮短了工期。在生產中注意補飛以及連接點的情況,可以提高工作效率,在實際生產中有很大意義。隨著無人機航攝的廣泛應用,在不使用地面控制或只通過少量地面控制點,通過增加垂直于基本航線的構架航線和GNSS輔助空中三角測量對無人機航攝空三加密提高平差精度和增加區域網之間的連續性都將有較大幫助。但目前無人機航攝獲取的影像質量不高,具體如何合理布設航線和設置航攝參數,用較少的工作量得到較高的空三加密成果,需要在以后實際工作中,積累更多的經驗。
參考文獻/References
[1]袁修孝 GPS輔助空中三角測量原理及應用[M].測繪出版社 2001.
[2] 金為銑,楊先宏,邵宏潮等.攝影測量學[M].武漢大學出版社 2001.
[3] 張劍清,潘勵,王樹根.攝影測量學[M].武漢大學出版社 2004.
[4] 楊傳玲 航空攝影測量新技術的應用與發展[J].中國高新技術企業2007.
[5] 袁修孝,李德仁. GPS輔助空中三角測量的若干探討.[J].武漢測繪科技大學學報 1997.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15