
一種新型水泥庫清理機器人設計與優化
2020-05-11 12:01:11包卿希張照益王建強b
科技創新與應用 2020年13期
包卿希 張照益 王建強b


摘? 要:傳統水泥庫清理大多采用人工作業的方式,效率低下且容易發生事故,是一種高勞動強度、高危險性的特種作業。在水泥庫頂開口較小而水泥庫的體積又很大的情況下,如何保證清理范圍覆蓋面廣且更安全高效快速,成為了亟待解決的核心問題。文章針對水泥庫清理現狀,提出了一種新型機器人,對其工作環境及功能要求進行分析,完成了機械結構設計并進一步優化,旨在實現水泥庫清理作業的智能化,提高水泥庫清理的工作效率和安全性。
關鍵詞:水泥庫清理;清庫機器;機械設計;結構優化
Abstract: Traditional cement silo cleaning is mostly done manually, which is inefficient and prone to accidents, so it is a special operation with high labor intensity and great danger. The primary problem that needs to be solved urgently is how to ensure that the cleaning area covers a wide area, while maintaining safety, efficiency and speed, in the case of a small opening at the top of the cement silo and a large volume of the cement silo. This paper proposes a new type of robot for the current situation of cement silo cleaning. It analyzes its working environment and functional requirements, completes the mechanical structure design and further optimizes it. It aims to realize the intelligence of cement silo cleaning operations, improve the efficiency of cement silo cleaning, and provide workers with a safe working environment.
前言
在清理水泥庫的過程中,由于水泥粉料與水泥庫庫壁貼合緊密、難以移除,以及現有水泥儲存結構存在可操作空間非常小等問題,給水泥儲存清潔人員帶來了嚴峻的挑戰[1],大多數水泥生產企業和社會企業還沒有充分認識到水泥儲存清潔項目的難度和危險性。
現如今,市場上專門針對清庫的裝備研發依舊處于初級階段,所研發的產品也僅僅局限于簡單的協助人工清理。伴隨著水泥和礦場企業生產效率的提高和國家對工人安全健康的高度重視,自動化取代人工清庫會逐漸成為市場的導向,滿足企業和水泥庫清理工人對高效自動化清理機器的迫切需求。
針對上述問題及背景,本文提出了一種新型水泥庫清理機器人,具備更高效安全的作業形式,更可靠穩定的機械結構,對實現水泥庫清理的智能化、高效性、安全性具有重要的工程意義。
1 水泥在水泥庫中的積料形式
水泥粉料在水泥庫中的流型大體分成整體流、漏斗流、管狀流、擴散流四種情形,主要是由于水泥庫內水泥長期以來粘結變質,導致水泥庫容積變小,在庫內生成了多種不同類型的積料形式[2]。
水泥粉料在水泥庫中的主要積料形式有依附性、鼠洞型、拱型、堵塞型等。其中,鼠洞型和依附型是水泥庫中較為常見的情況,也是比較容易清理的狀態。而拱型和堵塞型處理起來比較復雜,是在前兩種情況下的進一步演化,在實際生產中也會遇到。
2 機械結構設計
水泥庫清庫機器人主要由底座支架、旋轉機構、卷筒提升機構、工作臂機構組成,如圖1所示。
2.1 末端執行機構動力系統設計
水泥庫內壁清理機器人中的動力輸出主要有以下幾個,一是卷筒系統動力源電機;二是固定平臺的360度旋轉驅動電機,三是末端執行機構的旋轉驅動電機。
由于末端執行機構電機決定了水泥庫清理的效率和質量,根據其性能需求,確定使用伺服電機作為驅動電機。選用南京埃斯頓自動化有限公司生產關于EMG型號電機。
2.2 末端執行機構設計
末端執行部分是清理水泥庫壁粘料的重要載體,它清理的好壞直接影響庫壁整潔。目前,主要的驅動方式有電驅動和液壓及氣壓驅動。液壓驅動可以提供驅動壓力和動力。具有響應速度快、定位精度高、剛度高等特點。由于液壓油系統多變,工作性能受環境影響較大,工作性能較低,容易發生卸油現象。它通常用于提供更大的驅動力矩和移動性能。氣壓驅動結構簡單、性能穩定等優點,但驅動力矩不易控制0。電機驅動具有操作簡單、精度高、控制準確、響應快等優點。通過以上比較,提出了電機驅動的旋轉破碎法。電機驅動末端執行機構三維圖形如圖2所示:
2.3 卷筒提升機構設計
卷筒提升機構是實現工作臂可自由升降的機械裝置。卷筒提升機構主要由驅動裝置、傳動裝置、繞組裝置系統和制動裝置組成。除此之外,還可裝連接各種輔助的限位裝置,如升起高度限位器,力矩限制器等保護系統安全。驅動系統多采用電機驅動,易于布置、安裝和維修。傳動裝置包括減速器、彈性聯軸節和傳動軸。纏繞裝置主要包括卷筒和鋼絲繩滑輪組。卷筒系統如圖3所示:
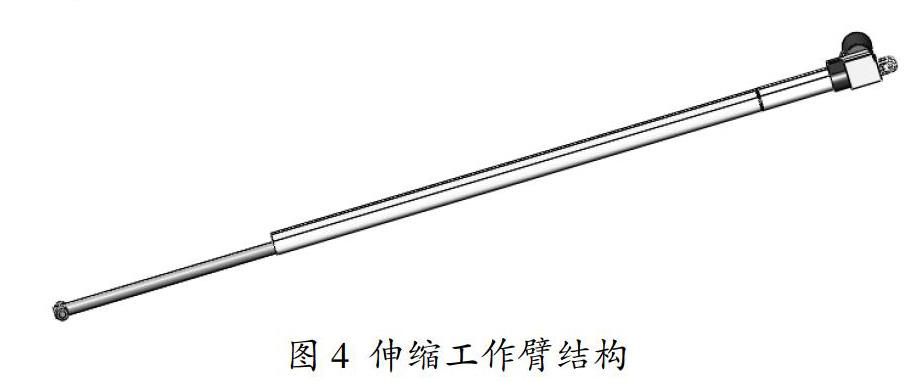
2.4 工作臂結構設計
工作臂的主要形狀直接決定了整個清洗裝置的范圍,因為水泥倉庫是中心下料和頂部偏移開孔的情況。根據實際工作情況,動力頭不需要工作在水泥庫內的所有位置,需要與水泥庫內壁保持一定的距離。針對這種偏心情況,選用電動伸縮推桿來使末端執行能夠達到庫壁料的指定位置,并清理。電動推桿工作臂如圖4所示:
3 力學分析
在清庫裝置中,根據工作情況及經驗分析可知,最薄弱的環節為工作臂部分,其中帶伸縮臂的小臂以及大臂與小臂間的連接軸是主要的受力部件。因此,將對這兩部分首先進行靜力學分析。對已建立的模型進行分析如圖5所示。
可以看出,伸縮臂的應力主要集中在與軸連接的端部,其最大應力接近鋁合金材料的最大許用應力,應注意保護。其次,直徑變化處也較為集中,可通過焊接加強筋等方式來加固。
4 結束語
在我國,傳統的水泥庫作為水泥的主流儲存方式,不僅數量巨大,而且多會出現庫壁掛料和積灰的狀況。傳統的水泥庫清理方法不僅清理時間長,影響了企業的正常生產,而且清庫導致的安全事故頻發,企業很難找到合適的清潔工人來完成工作。因此,開發自動化的庫倉清理機器人系統而非人工作業顯得尤為迫切,具有重要的社會意義。
參考文獻:
[1]王衛恒,閆青,朱旭.水泥庫結塊的原因及處理措施[J].水泥技術,2016(2):88-89.
[2]張琳.水泥庫粉料粘接機理及清庫系統的研究[D].河北:河北工業大學,2012.
[3]焦洪濤.料倉清堵技術及氣壓旋轉式清堵裝置的研究[J].粉煤灰,2014(1):11-12.
猜你喜歡
機械工業標準化與質量(2023年6期)2023-09-26 06:43:34
湖北農機化(2020年4期)2020-07-24 09:07:12
建材發展導向(2019年10期)2019-08-24 06:25:34
電子制作(2018年8期)2018-06-26 06:43:40
科技視界(2016年18期)2016-11-03 20:33:59
中國科技博覽(2016年18期)2016-10-19 10:38:31
中國市場(2016年33期)2016-10-18 14:10:51
中國市場(2016年33期)2016-10-18 14:03:59
商業經濟研究(2016年14期)2016-09-14 08:58:20
工業設計(2016年1期)2016-05-04 03:59:38
