空間激光通信中復合跟蹤技術研究
2020-05-12 00:51:24劉云清
激光與紅外 2020年4期
王 偉,劉云清,董 巖,趙 馨
(1.長春理工大學電子信息工程學院,吉林 長春130022;2.長春理工大學研究生學院,吉林 長春130022)
1 引 言
空間激光通信與傳統通信技術相比,具有高保密性、通信速率高、抗干擾等諸多特點,已經成為現代科技發展的主流通信方案。由于激光通信通常應用于遠距離傳輸通信,因此要求目標光束的精確對準,而光束是呈高斯分布,即隨著距離的增加,光束范圍越大,故激光通信精確度應小于束散角的1/5-1/6,相應的跟蹤精度一般要求達到微弧度量級。一般的單軸跟蹤系統由于具有大慣量和諧振頻率的限制,不能滿足實際的跟蹤需求,于是衍生出復合軸跟蹤系統[1-3]。復合軸跟蹤系統最早見于1966年Thomas W.發表的文章[4],作者在數字激光測距跟蹤裝置中首次采用了復合軸伺服機構,使用主機架作為它的粗跟蹤,使用快速反射鏡作為精跟蹤,實時對粗跟蹤進行修正補償,實現了更高精度的跟蹤。歐空局(ESA)SILEX計劃采用的復合軸系統于2001年11月成功實現了星間激光通信,該系統驗證了復合軸系統應用于激光通信的可行性,具有里程碑的意義[5]。傳統的復合軸跟蹤系統為雙探測器跟蹤系統,雖然可實現高精度的跟蹤,并且技術成熟,但是其光路設計難度大、體積大等缺點也成為了限制其發展的主要因素。系統的輕小型化成為主流發展趨勢和研究重點[6]。單探測器型復合軸系統采用一個探測器,其激光通信結構方面減少了一路光學系統,有效地實現了輕小型化,同時帶來的是單探測器復合軸系統耦合性大的問題。單探測器復合軸系統以美國的OCD系統最為成功,該系統采用探測器二開窗結構,突出了輕小型化。
結合空間激光通信的特點和復合軸跟蹤的關鍵技術,對單探測器復合軸粗、精跟蹤系統做進一步討論,給出粗、精跟蹤伺服系統設計方案,并在室內搭建實驗平臺,對系統的跟蹤精度指標與通信性能進行測試,實現跟蹤精度優于1個像素。滿足應用需求,擴寬了空間激光通信復合軸的應用前景。
2 單探測器復合軸系統原理
單探測器復合軸伺服系統主要由目標的捕獲、粗跟蹤、精跟蹤三個部分構成。其系統基本組成原理如圖1所示。系統采用唯一探測器進行目標的捕獲以及對粗、精跟蹤系統進行控制,實現單探測器系統的輕小型化,但粗精耦合性強,不易控制,易導致目標脫離粗跟蹤跟蹤范圍,進而導致跟蹤失敗。針對復合軸組成特點,采用粗跟蹤配合補償精跟蹤偏轉量的方法可有效實現粗精解耦合。首先對目標的初始掃描捕獲階段,CCD跟蹤相機與粗跟蹤系統形成閉環,這個階段,相機工作在大視場,低幀頻狀態,脫靶量信息提供給粗跟蹤,實現對目標的快速捕獲。隨后捕捉到目標后進行粗跟蹤,當目標穩定在精跟蹤視場內,啟動精跟蹤,此時CCD跟蹤相機與精跟蹤系統形成閉環,脫靶量信息將只提供給精跟蹤,而粗跟蹤脫靶量信息由精跟蹤的快反鏡角度傳感器給出。這個階段,相機工作在小視場,高幀頻狀態,可實現對目標的精確跟蹤。通過上述過程可以保證粗精復合軸系統穩定工作。
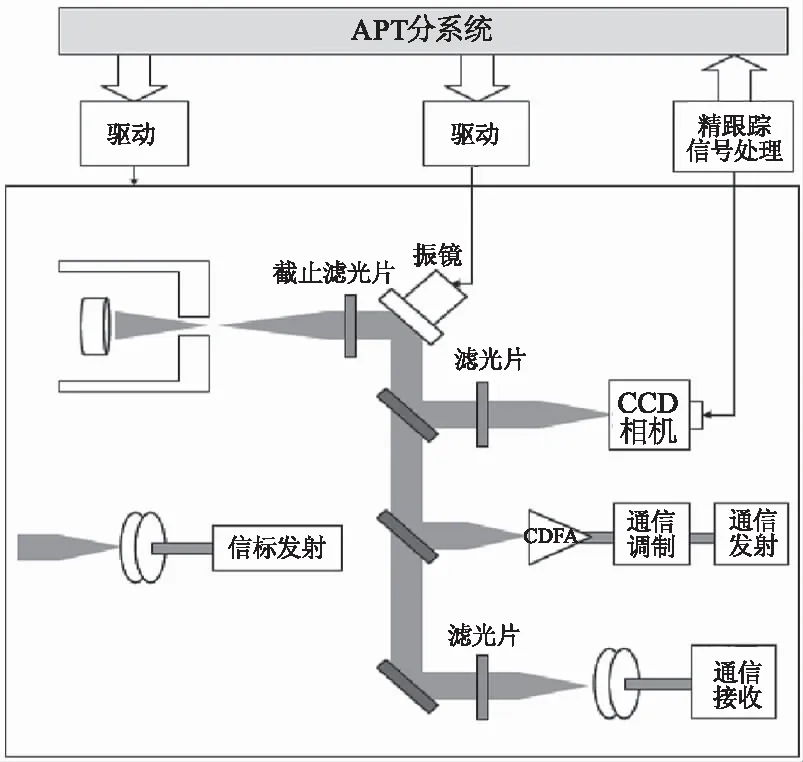
圖1 單探測器APT系統基本組成原理圖Fig.1 Basic configuration diagram of single detector APT system
3 單探測器復合軸伺服系統設計
3.1 單探測器系統結構原理
根據復合軸組成原理,設計單探測器復合軸系統結構框圖如圖2所示。探測器D1,提取目標位置信息θi,并將目標脫靶量傳遞給精跟蹤系統,經解算得出控制單元補償函數Cf(s),進一步通過精跟蹤伺服單元Af(s)進行跟蹤補償;解耦回路D2采集精跟蹤系統的偏轉量,給出粗跟蹤控制單元補償函數Ce(s),通過粗跟蹤伺服單元Ae(s)進行補償,最后將粗、精跟蹤補償信息反饋,形成閉環。

圖2 單探測器系統結構框圖Fig.2 Single detector system block diagram
令Ge=Ae×Ce,Gf=D1×Cf×Af,整個系統的傳遞函數如式(1),整個單探測器系統的閉環傳遞函數有效地實現了解耦。
(1)
2.2 單探測器系統建模
整個單探測器復合軸系統正常工作過程中,粗跟蹤的伺服系統將停止對光斑脫靶量的采集,其脫靶量信息由精跟蹤的快反鏡角度傳感器給出,再由執行器(伺服電機)進行跟蹤,完成對精跟蹤的補償。整個粗跟蹤系統校正后的模型函數為式(2)所示。
(2)
精跟蹤系統的脫靶量信息由高幀頻CCD跟蹤相機提供,伺服執行器采用小慣量、高帶寬、高精度的快速反射鏡,振鏡可實現高達2 k帶寬,可實現對目標的快速跟蹤。整個精跟蹤校正后的模型函數為式(3)所示。
(3)
4 實驗測試及結果
搭建實驗系統完成單探測器復合軸跟蹤系統性能測試,實驗驗證結構圖如圖3所示,光源采用光纖激光器,可通過外部輸入對其光強度進行調制,在激光鏈路中我們采用六自由度轉臺給整個系統添加一個擾動,用此模擬目標運動軌跡。光信號進入平行光管,進行光路的調整,調整后的光路進入潛望周掃架構,經CCD相機,可解算出運動目標的脫靶量信息,并將此信息提供給精跟蹤系統,由精跟蹤控制系統控制精跟蹤執行器進行目標位置的追蹤,隨后角度偏轉傳感器將提取精跟蹤的位置偏轉角度,并將此角度信息傳遞給粗跟蹤控制系統,控制粗跟蹤對精跟蹤偏轉的角度進行補償,并將最終的補償結果反饋給主系統,即形成CCD相機、精跟蹤、粗跟蹤的閉環控制。整個跟蹤過程,可通過圖像顯示單元觀察到光斑的位置,以及是否進行了有效的跟蹤。
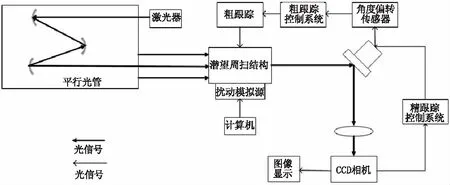
圖3 實驗驗證結構圖Fig.3 Experimental verification structure
探測相機選用CCD 相機,設置積分時間 10 ms,當其工作在大窗口模式時,分辨率為1240×1240 像素,當其工作在小窗口模式時,分辨率為80×80 像素。測試中給定擾動模擬源,幅值±0.25°、頻率0.1 Hz。光斑實際擾動軌跡如圖4所示。
當系統進行跟蹤,即粗精復合狀態時,精跟蹤跟蹤目標,粗跟蹤對精跟蹤偏轉位置進行補償,系統各部分運動軌跡如圖5所示。圖5為粗跟蹤運行軌跡圖,由設計原理知其反映精跟蹤的偏轉位置,故應與擾動軌跡相同。對比可知粗跟蹤運動軌跡與實際轉臺的運動曲線相符,因此實現系統功能。
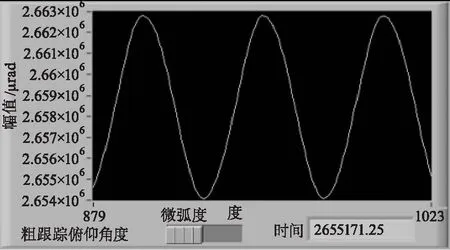
圖5 粗跟蹤運行軌跡圖Fig.5 Rough tracking trajectory map
圖6為精跟蹤運行軌跡圖,此圖反映的是系統粗跟蹤誤差,跟蹤精度為±500 μrad之內。圖7為跟蹤圖像軌跡圖,反映的是系統精跟蹤誤差。此時精跟蹤反應該系統的總體誤差;可看到系統的精度誤差控制在1個像素之內,均方根RMS=0.13,本實驗采用的單像素點為22 μrad,故系統總體跟蹤精度為22×0.13=2.86 μrad。結合實驗條件知,滿足單探測器復合軸跟蹤系統實際應用需求。
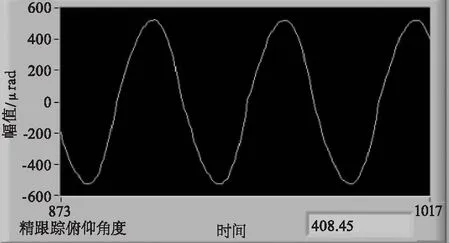
圖6 精跟蹤運行軌跡圖Fig.6 Fine tracking trajectory map
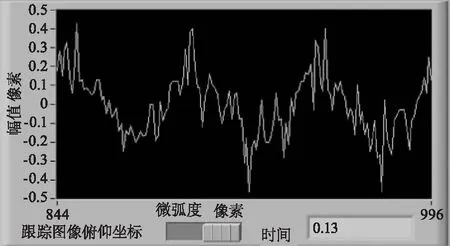
圖7 跟蹤圖像軌跡圖Fig.7 Tracking image track map
5 結 論
空間激光通信是未來高速、大容量通信領域的關鍵技術也是發展趨勢[7]。近幾年來,在APT子系統上已取得了重大的突破。本文基于單探測器復合軸跟蹤系統,采用CCD跟蹤相機與精跟蹤系統形成閉環的工作模式,實現目標跟蹤。精跟蹤脫靶量信息由CCD相機提供,粗跟蹤脫靶量信息由精跟蹤的快反鏡角度傳感器給出,實時補償精跟蹤的偏轉角度,保證目標穩定在精跟蹤視場,提高系統的穩定性。解決了單探測器復合軸系統的耦合性問題。并在室內搭建實驗系統,對系統的跟蹤精度指標與通信性能進行測試,實現粗跟蹤伺服系統帶寬為10 Hz左右,精跟蹤伺服系統帶寬為300 Hz左右。實驗結果表明,在固定擾動幅值±0.25°、頻率0.1 Hz模式下,系統粗跟蹤誤差控制在±500 μrad之內,系統精跟蹤跟蹤精度優于3 μrad。整個跟蹤系統穩定,可以實現高穩定、高精度的跟蹤,滿足其在空間激光通信系統中的應用需求。這種設計為系統在空間光通信方面的研究奠定了基礎。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中外會展(2014年4期)2014-11-27 07:46:46
