碼頭多功能作業車液壓系統設計
2020-05-13 13:02:52余世林
黑龍江交通科技 2020年3期
余世林
(陸軍軍事交通學院鎮江校區,江蘇 鎮江 212003)
0 引 言
港口碼頭作為物資水陸轉運的重要基地,其狀況保持好壞直接影響到貨物流動效率。碼頭多功能作業車是針對港口碼頭輕度破損情況下的特點和實際需求,研制的集高低空作業、夜間照明、碼頭及碼頭設施的維護搶修等功能于一體的碼頭維修裝備。
在港口碼頭遭受損傷情況下,高低空設施和電路的損壞對碼頭正常運行影響尤為重大,在碼頭快速搶修環節中,高低空作業和用電作業對搶修起到關鍵作用。碼頭多功能作業車的高低空作業裝置的控制和用電設備的電力來源由車輛的液壓系統所控制驅動,碼頭多功能作業車液壓系統液壓系統作為該車的動力源,其設計質量直接影響到該車效能的發揮,是該車研制成功的關鍵所在。
1 碼頭多功能作業車液壓系統原理設計
1.1 碼頭多功能作業車工作流程
碼頭多功能作業車液壓系統主要驅動支腿機構的展開與撤收、高低空作業裝置的展開與撤收以及取力發電設備的工作(見圖1)。

圖1 碼頭多功能作業車展開作業示意圖
(1)支腿機構展開的工作流程
支腿機構主要由固定支腿、活動支腿、水平油缸、垂直油缸和支腳板組成,其通過液壓泵泵取液壓油經支腿控制閥驅動支腿水平油缸展開或收回活動支腿,驅動垂直油缸舉升或下降整個修理車。
(2)高低空作業裝置的工作流程
高低空作業裝置主要由轉臺、回轉機構、主臂、折臂總成、工作斗、調平機構、電液系統等組成。
工作時,液壓馬達驅動回轉機構帶動高低空作業裝置相對副車架回轉;驅動主臂油缸帶動主臂做變幅運動;驅動折臂油缸實現折臂的變幅運動。
(3)自取力發電裝置的工作流程
在需要使用用電設備時,發動機動力經取力器、液壓泵傳至液壓馬達,由馬達帶動發電機發電,經由配電廂發配電。
1.2 液壓系統原理設計
(1)系統組成
該車液壓系統(如圖2)主要由液壓泵、液壓馬達、支腿操縱閥、主比例閥、調平比例閥、分流閥、溢流閥、平衡閥、雙向液壓鎖、手搖泵、回轉復合緩沖閥、應急動力單元、液壓油箱、中心回轉接頭、過濾器等液壓元件及管路附件等組成。其中平衡閥、雙向液壓鎖、應急泵等安全裝置,可以防止油路過載和避免因軟管破裂而引起意外事故。

1-回轉平衡閥;2-平衡閥;3-折臂平衡閥;4-主閥;5-壓力表開關;6-調平平衡閥;7-調平工作閥塊;8-液壓鎖;9-多路換向閥;10-壓力表;11-高壓過濾器;12-發電馬達;13-油源閥塊;14-應急動力單元;15-齒輪泵圖2 液壓系統原理圖
(2)取力裝置設計
液壓系統以汽車發動機為動力,通過取力器取力至液壓泵,在液壓系統中裝有電磁閥,當取力發電時,液壓動力傳至液壓馬達帶動發電機發電,然后經由配電箱發配電,為維修機工具提供動力。當高低空作業裝置工作時,液壓油一路經調平平衡閥到達工作斗調平油缸,實現工作斗調平;另一路經雙向閥分別作用于支腿機構和臂架機構,以實現前支腿的伸縮、頂升和后支腿的擺動、頂升,吊臂變幅、回轉,折臂展開以及工作斗調平。液壓系統還設有備用動力單元,可以調節工作斗、臂架機構和支腿機構,以備雙聯泵失效時使用。
(3)支腿部分液壓系統原理設計
支腿展收采用開式液壓系統,支腿部分油路采用純機械操縱型。支腿油缸上裝有雙向液壓鎖,可將活塞桿鎖定在任意位置上,以防止高低空作業裝置在長時間作業時,支腿自行回縮。并可避免因油路中軟管發生意外破裂,致使支腿失壓而造成翻車事故。同時也可防止整車在行駛或停放時支腿自行外伸或跌落。支腿的操縱由下裝操縱閥完成,操縱閥旁設有水平儀,用以調整整車水平。從而保證系統性能穩定可靠。
(4)高低空作業裝置液壓系統原理設計
高低空作業裝置由液壓系統驅動,通過電氣系統控制,采用電液比例閥操縱,具有操作輕便靈活、無級變速、微動性能好、自動化程度高等優點。作業時由液壓回轉機構、變幅油缸、折臂油缸、調平控制、工作臺控制六動作的聯合運作來達到工作臺任意位置的定位。回轉機構由液壓系統驅動,為避免回轉擺動,在液壓馬達中安裝回轉緩沖閥,回轉平穩可靠。工作斗調平機構主要由調平角度傳感器、電液伺服機構、折臂油缸等組成,調平角度傳感器通過電液伺服機構操縱折臂油缸自動完成調平,工作平穩,噪聲小,操作方便。
2 液壓系統計算
2.1 取力計算校核
取力發電裝置安裝于底盤下(如圖3所示),以汽車發動機(ISBE185 30)為動力,通過取力器(型號為4205NG-010)取力至雙聯泵(CBG2050/1010)。在液壓系統中裝有電磁閥,當取力發電時,液壓動力傳至液壓馬達(XM-40),帶動發電機(E031)發電;當高低空作業裝置工作時,液壓油一路經調平平衡閥到達工作斗調平油缸,實現工作斗調平;另一路經雙向閥分別作用于支腿機構和臂架機構,以實現前支腿的伸縮、頂升和后支腿的擺動、頂升,吊臂變幅、回轉,折臂展開以及工作斗調平。
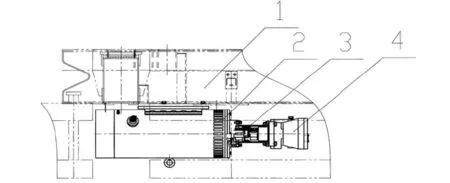
1-副車架;2-發電機;3-聯軸器;4-液壓馬達圖3 取力發電裝置結構圖
(1)發電取力計算校核
①發電機驅動扭矩
發電機額定轉速1 500 r/min,輸出功率14 KW,功率因素1.0,發電馬達排量40 mL/r,馬達機械效率0.9。
發電機驅動扭矩Md=9 549P/n=89 Nm
雙聯泵供發電機發電時油泵總排量50 ml/r,考慮損耗(總效率取0.75),油泵能提供至發電馬達的扭矩為
②取力器輸出扭矩
油泵總排量50 ml/r,液壓系統壓力21 MPa,油泵機械效率0.9,取力器允許扭矩350 Nm。
因此,取力發電裝置設計滿足使用要求。
(2)高低空作業取力計算校核
高低空作業裝置系統工作壓力為20 MPa,支腿控制系統工作壓力為18 MPa,發電系統工作壓力為14 MPa。選用的CBGj2050/1010雙聯齒輪泵額定壓力為20 MPa,公稱排量為50/10 ml/r,發動機工作轉速800 r/min,容積效率>92%,總效率>83%,其中CBGj2050供高低空作業系統,CBGj1010供工作斗調平系統。當發動機用于發電時,額定轉速2 500 r/min。
①系統流量計算
ISBE185 30發動機怠速為800 r/min,額定轉速為2 500 r/min,取力器減速比為1.716。
則CBGj2050流量L怠=50×800×0.83/1.716/1 000=19.35 L/min
L額=50×2 500×0.83/1.716/1 000=60.46 L/min
則CBGj1010流量L怠=10×800×0.83/1.716/1 000=3.87 L/min
L額=10×2 500×0.83/1.716/1 000=12.09 L/min
②發電機工作狀態計算
E031發電機額定轉速為1 500 r/min,輸出功率14 KW,功率因素1.0。額定扭矩M=14×9 549/1 500=89.124 Nm,對應的XM-F40L發電馬達壓力P=M×10×0.91/1.59/40=12.75 MPa,考慮管路損失,取發電系統壓力為14 MPa。
③各油泵額定功率計算
調平系統壓力為18 MPa,P調平=L×P/60/0.83=1.4 KW
高低空作業裝置壓力為20 MPa,P高低空=L×P/60/0.83=7.77 KW
為保證高低空作業的安全性,維持發電機轉速的穩定性,在配電箱上安裝發電控制開關。當控制開關閉合時,底盤發動機油門的電磁氣閥動作,調整發動機轉速至2 500 r/min,油泵配油塊的電磁閥動作,發電馬達的油路接通,開始發電。在正常發電狀態下,高低空作業裝置不工作。當需要高低空作業時,可斷開發電控制開關,發動機轉速自動調整至怠速狀態800 r/min,高低空作業裝置及自動調平機構可以正常工作,發電機不工作。
2.2 執行元件分析計算
要保證碼頭多功能作業車工作安全可靠,工作斗的升降速度和回轉機構的回轉速度必須控制在規定范圍內。根據GB/T9465-2008的要求,工作平臺的起升、下降速度應不大于0.4 m/s,回轉機構的作業車最大回轉速度不大于2 r/min。表1給出了各執行元件的供油量和結構尺寸,并校核計算最大運行速度。
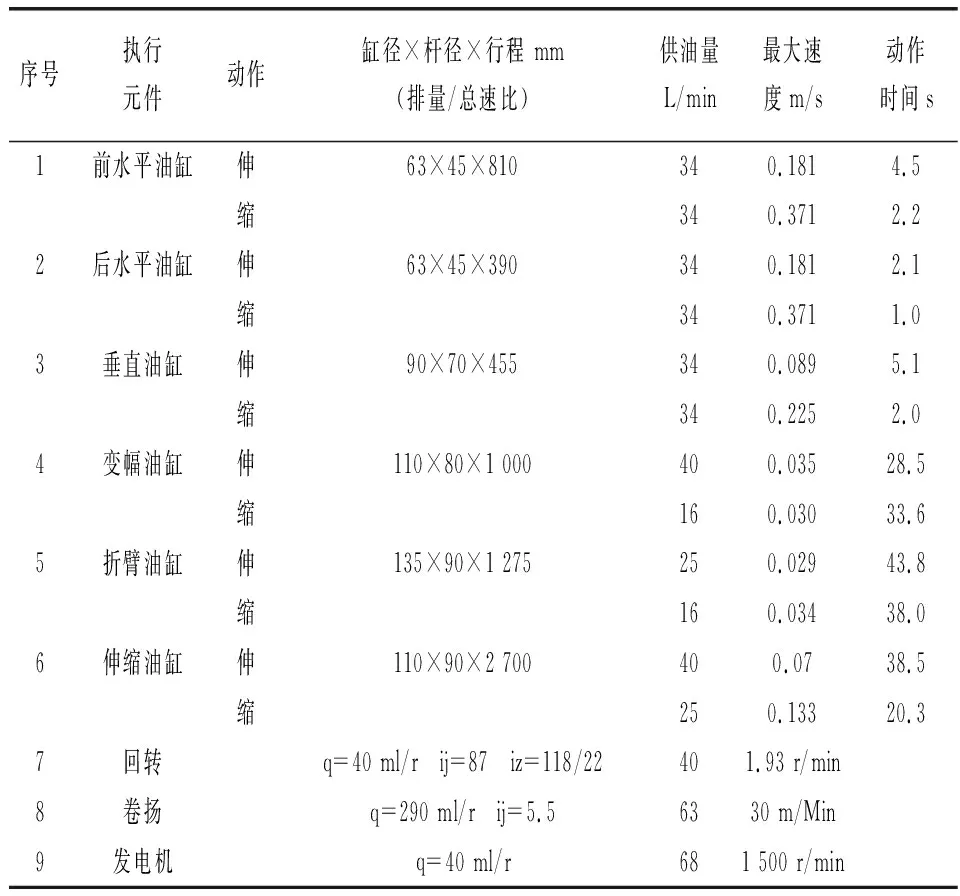
表1 各執行元件的速度分析
3 結 論
本文根據碼頭設施設備損傷維修的實際需求,設計了一種適合碼頭多功能作車車作業的液壓系統,該系統具有以下特點。
(1)采用雙聯泵設計汽車發動機取力發電系統,能夠很好的適應碼頭多功能作業車高低空作業和用電作業的需要。
(2)液壓系統設計有備用動力單元,以備雙聯泵失效時使用,保證了高低空作業的安全性。
(3)高低空作業裝置采用電液比例閥操縱,操作便靈活、微動性能好;回轉機構在液壓馬達中安裝回轉緩沖閥,平穩可靠;工作斗調平機構通過電液伺服機構操縱折臂油缸自動完成調平,工作平穩,噪聲小。
經過港口碼頭3年的應用表明,系統的設計選型科學合理,保證了裝備的使用安全可靠,快速方便。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08