雙小車岸邊集裝箱起重機(jī)主吊具防搖防扭控制特性研究
2020-05-14 06:12:34段小明
港口裝卸 2020年2期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
段小明 單 磊
上海振華重工(集團(tuán))股份有限公司
1 引言
自動(dòng)化碼頭雙小車岸邊集裝箱起重機(jī)(以下簡稱岸橋)主要包括主小車(前小車)和門架小車(后小車)。在自動(dòng)化岸橋主小車防搖控制方面比較常見的方式為電子防搖,主要包括輸入整形、分段加減速、線性二次型LQR、模糊控制以及滑模控制[1]。主小車吊具防扭控制方面主要包含機(jī)械分離小車方式[2]、變頻防扭電機(jī)控制方式、后大梁油缸基于Bang-Bang控制理論等電子防扭方式。但是能夠應(yīng)用于實(shí)際的產(chǎn)品基本是國外的,存在價(jià)格昂貴且源代碼不可見等問題,因此設(shè)計(jì)開發(fā)一套有效的自動(dòng)防搖定位以及防扭控制方法很有必要。本文介紹了主小車吊重負(fù)載動(dòng)力學(xué)模型,主小車防搖定位控制及主吊具防扭控制方法。實(shí)踐證明在大多數(shù)情況下,該方法能夠有效減少吊具搖晃及旋轉(zhuǎn)運(yùn)動(dòng),縮短自動(dòng)對箱操作時(shí)間,提高自動(dòng)化作業(yè)效率。
2 主小車防搖控制
2.1 主小車動(dòng)力學(xué)模型
考慮到主小車是一個(gè)強(qiáng)耦合的非線性時(shí)變系統(tǒng),為簡化分析,將主小車吊重負(fù)載看成一個(gè)懸擺點(diǎn)可移動(dòng)的單擺模型(見圖1)。
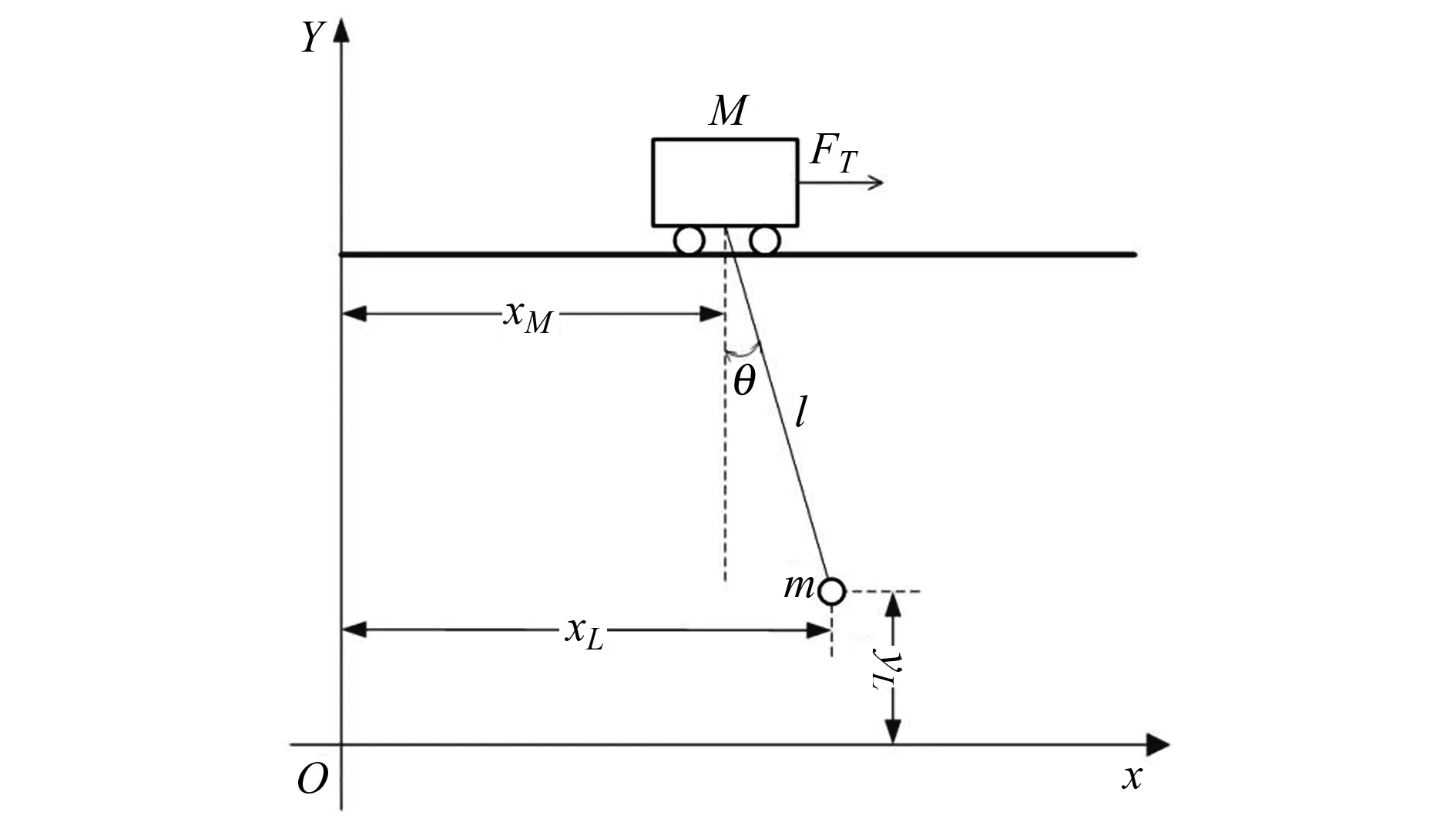
圖1 小車-吊重負(fù)載模型
其中M和m分別為主小車和吊重的質(zhì)量(不帶載時(shí)為吊具質(zhì)量),l為起升鋼絲繩的長度,xM表示主小車在水平方向上的位移,xL表示吊重在水平方向上的位移,yL表示吊重在起升方向上的位移,θ表示吊重偏離豎直方向的擺角。
(1)
選取吊重在最低點(diǎn)時(shí)為零勢能位置,系統(tǒng)勢能為:
V=mgl(1-cosθ)
(2)
根據(jù)Lagrange第二類方程,并選取主小車位移,繩長及擺角為廣義坐標(biāo),得到系統(tǒng)的非線性動(dòng)力學(xué)模型為:
(3)
(4)
(5)
式中,F(xiàn)T為主小車方向驅(qū)動(dòng)力;FH為主小車起升方向驅(qū)動(dòng)力;g為重力加速度。
考慮到主小車防搖定位時(shí)的控制量為小車方向速度指令信號,則
(6)
式中,Vref為小車速度指令信號;Kp為增益系數(shù),此處忽略負(fù)載轉(zhuǎn)動(dòng)慣量的折算質(zhì)量這部分產(chǎn)生的力。


(7)
2.2 主小車路徑規(guī)劃及運(yùn)動(dòng)控制
在集裝箱運(yùn)輸過程中,為了讓吊具搖晃角度盡可能小,設(shè)計(jì)的軌跡應(yīng)盡可能平滑,同時(shí)設(shè)計(jì)的軌跡應(yīng)滿足一定邊界約束條件,即滿足起始、結(jié)束段位置條件,速度條件及其有限階次導(dǎo)數(shù)存在。選擇的負(fù)載軌跡(xd,yd)為九次多項(xiàng)式軌跡,多項(xiàng)式系數(shù)由牛頓插值法確定,具體的運(yùn)行軌跡見式(8)和式(9)。
xd(t)=xs+(xe-xs)·
(8)
yd(t)=ys+(ye-ys)·
(9)
式中,(xs,ys)為吊具起始位置;(xe,ye)為吊具終端位置;T為小車到達(dá)目標(biāo)點(diǎn)的時(shí)間。

為了增強(qiáng)系統(tǒng)抗干擾能力以及補(bǔ)償建模誤差,此處采用帶積分環(huán)節(jié)的LQR控制方式。另外,為了直接利用吊重相對位置檢測傳感器輸出數(shù)據(jù)(吊重相對位置xd為吊重偏離垂直方向的位移,向前擺動(dòng)為正,向后擺動(dòng)為負(fù)),將狀態(tài)變量中角度輸出部分替換為吊重相對位置值,且近似認(rèn)為xd=lθ,控制輸出表達(dá)式為:
(12)
式中,exd為吊重相對位置偏差;控制增益k1、k2、k3、k4、k5由Riccati方程決定。
2.3 防搖定位效果驗(yàn)證
為了驗(yàn)證所設(shè)計(jì)控制器有效性,在實(shí)際岸橋設(shè)備上進(jìn)行了測試。主吊重位置由自主研發(fā)的吊具位置檢測系統(tǒng)獲得,通過RS422與主控單元進(jìn)行通訊,主控單元與設(shè)備控制器通過Profibus-DP進(jìn)行通訊,實(shí)現(xiàn)運(yùn)動(dòng)控制指令下發(fā)與設(shè)備運(yùn)行狀態(tài)反饋。測試工況為主小車空吊具從海側(cè)前大梁運(yùn)行至平臺(tái)上方并自動(dòng)著箱,風(fēng)速7 m/s左右。主小車重量100 kg,主吊具重量15 kg,Kp=1×105,控制周期10 ms,采樣周期100 ms。實(shí)驗(yàn)結(jié)果見圖2。
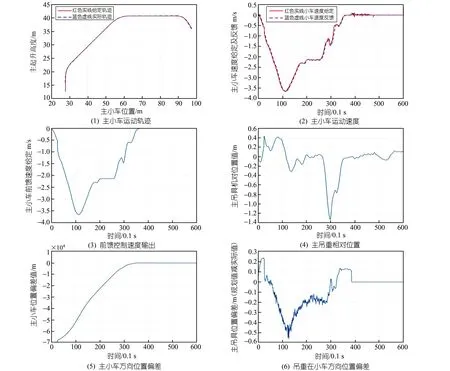
圖2 防搖實(shí)驗(yàn)結(jié)果
從圖2中可以看出,所設(shè)計(jì)的控制器能夠很好的跟蹤設(shè)計(jì)軌跡,小車達(dá)到目標(biāo)后,小車位置偏差很小,吊具幾乎無明顯搖晃情況,LQR能很好補(bǔ)償?shù)羟梆伩刂撇糠之a(chǎn)生的位置偏差(本次試驗(yàn)該誤差在100 mm左右),可實(shí)現(xiàn)主吊具準(zhǔn)確快速對位自動(dòng)著箱,提高自動(dòng)化作業(yè)效率。
3 主吊具防扭控制
3.1 工況描述
考慮到目前常規(guī)橋吊均通過后大梁傾回轉(zhuǎn)液壓系統(tǒng)來控制主吊具傾回轉(zhuǎn)角度,此處采用控制油缸運(yùn)動(dòng)速度的方式來達(dá)到主吊具自動(dòng)防扭的目的,整個(gè)系統(tǒng)的控制框架示意見圖3。
通過扭轉(zhuǎn)角度傳感器獲取吊具的實(shí)時(shí)位姿信息,并將其輸入到自動(dòng)防扭控制器,控制器輸出直接驅(qū)動(dòng)后大梁傾回轉(zhuǎn)油缸的伸縮運(yùn)動(dòng),進(jìn)一步通過調(diào)整吊具上架起升鋼絲繩的相對長度,實(shí)現(xiàn)吊具動(dòng)態(tài)防扭補(bǔ)償目的。
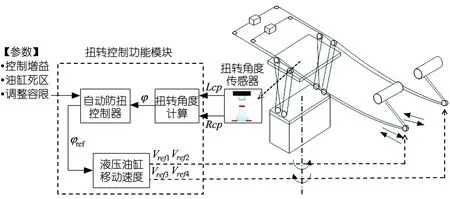
圖3 主吊具防扭控制框架示意圖
整個(gè)系統(tǒng)鋼絲繩纏繞復(fù)雜,系統(tǒng)柔性較大,后大梁液壓站油缸及比例控制閥具有非線性特性,系統(tǒng)輸出響應(yīng)延遲較大,準(zhǔn)確數(shù)學(xué)模型較難建立。因此采用帶死區(qū)補(bǔ)償?shù)淖冊鲆鍼ID控制策略,其中一個(gè)控制器負(fù)責(zé)吊具回轉(zhuǎn)角度控制,另一個(gè)控制器負(fù)責(zé)吊具油缸位置控制。控制器參數(shù)的獲取,通過辨識(shí)的油缸位移與擺角變化曲線,結(jié)合實(shí)際運(yùn)行過程中的工作頻率獲得,并通過現(xiàn)場測試,加以確定。實(shí)際作業(yè)時(shí),通過獲取后大梁油缸位移數(shù)據(jù),經(jīng)過控制器處理,輸出為4個(gè)油缸的給定速度信號,控制后大梁傾回轉(zhuǎn)油缸的伸縮運(yùn)動(dòng)。
3.2 防扭效果驗(yàn)證
為驗(yàn)證所設(shè)計(jì)控制器有效性,選取不同起升高度,不同吊具尺寸狀態(tài)進(jìn)行防扭控制效果驗(yàn)證。圖4為該控制策略在選定工況下各變量變化情況,從上往下依次為扭轉(zhuǎn)角度傳感器實(shí)時(shí)反饋值、防扭控制使能、后大梁4個(gè)油缸速度給定值。控制目標(biāo)為±1.2°。
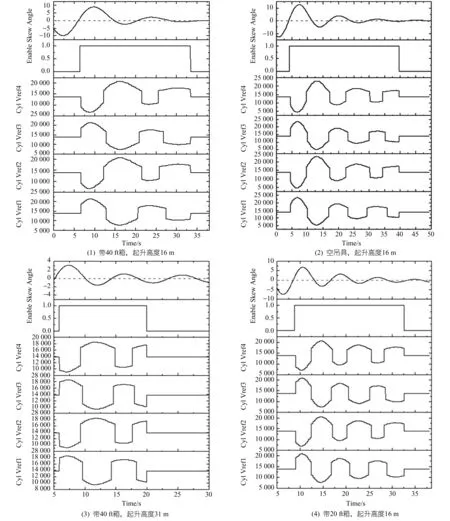
圖4 防扭控制驗(yàn)證結(jié)果
從圖4中可以看出,吊具基本能在2個(gè)周期內(nèi)實(shí)現(xiàn)自動(dòng)防扭控制,而且后大梁油缸速度給定相對平緩,調(diào)整過程中不會(huì)出現(xiàn)油缸高頻率來回往返運(yùn)動(dòng)的情況,可有效避免通過開關(guān)量控制方式造成液壓系統(tǒng)發(fā)熱嚴(yán)重等問題,提高吊具自動(dòng)對箱作業(yè)效率。
4 結(jié)語
實(shí)踐表明,所設(shè)計(jì)的防搖定位控制器能夠有效控制小車在加減速過程中產(chǎn)生的吊具搖晃問題,且小車到達(dá)目標(biāo)位置時(shí)定位精準(zhǔn),滿足吊具自動(dòng)著箱的要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
