多角度SAR 動目標檢測技術及其高分三號實驗驗證研究
2020-05-18 05:27:34申文杰胡玉新
雷達學報 2020年2期
申文杰 韓 冰 林 赟 胡玉新 洪 文*
①(中國科學院空天信息創新研究院 北京 100190)
②(中國科學院大學 北京 100049)
③(中國科學院空間信息處理與應用系統技術重點實驗室 北京 100190)
④(北方工業大學 北京 100144)
1 引言
合成孔徑雷達(Synthetic Aperture Radar,SAR)技術一經提出便得到了廣泛地關注、發展和應用。近年來,隨著新概念新體制的不斷提出、雷達系統水平及其信號處理技術的發展,合成孔徑雷達系統技術已從傳統的高分寬幅逐步呈現出以多維度數據[1]獲取、處理和應用的發展趨勢,其中,SAR多角度觀測因其適用于多平臺非理想軌跡自適應成像、各向異性散射特征提取、全方位目標三維精細結構重建等方面的獨特優勢,成為多維度SAR中直接取得突破性進展并開展應用的維度之一。
與此同時,地面動目標指示(Ground Moving Target Indication,GMTI)作為常規SAR的重要模式之一,其檢測性能主要依賴于多通道雷達硬件系統及其復雜信號與數據處理來實現。隨著SAR多角度觀測研究進展[2-4]、多角度SAR概念和體制的提出[5],通過航跡控制、天線技術、信號處理、觀測目標認知等技術的一體化,有望在現有平臺航跡及雷達系統自身條件下(如星載SAR已經具備大至±15°、機載近直線飛行大至±45°等數據獲取能力),利用多方位、長時間、序列數據的多角度觀測及信號處理,使得運動目標檢測、追蹤、參數估計乃至高分辨重建都已成為可能。由此可以實現GMTI模式在單通道雷達系統上的功能拓展、多通道雷達系統上的性能提升。
在研討近年來多角度SAR-GMTI研究基礎及發展現狀的基礎上,本文重點介紹了研究團隊圍繞高分3號開展的原理性驗證實驗研究,包括凝視聚束模式動目標檢測方法研究、雙通道動目實驗模式、雙通道凝視聚束GMTI模式研究等。具體內容為:(1)針對單通道凝視聚束模式的動目標檢測方法研究,旨在為未來單通道多角度SAR動目標檢測做技術積累;(2)為了實現多角度與多通道模式優勢互補,利用高分3號雙通道動目標實驗模式研究了主流的多通道算法;(3)利用高分3號完成凝視聚束模式下的雙通道動目標實驗。上述實驗及結果研究尚未見公開報道。
2 多角度SAR-GMTI研究現狀
傳統窄波束SAR采用側視觀測幾何來獲得方位-斜距二維圖像。其存在兩點問題,(1)地形起伏引起的疊掩、透視伸縮、陰影等現象;(2)有限的方位信息使得圖像解譯等應用受限。近年來,學者們以機載系統為對象,開始研究具備多角度觀測能力的SAR模式。
圓跡SAR成像原理研究及飛行試驗進展為SAR多角度觀測提供了研究基礎[2,6]。圓跡SAR模式通過載機平臺的圓周曲線飛行軌跡、雷達波束的觀測區域中心指向控制、以及獨特的相干+非相干三維成像算法等,最大限度地實現了360°全方位觀測[2,4,7]。隨著研究的深入和應用的開展,多角度SAR及其數據獲取方法被提出[5],主要概念內涵包括單一平臺近直線飛行條件下寬角相掃模式(如±45°)、離散多角度作業模式及多平臺分布式節點協同作業模式等。與常規圓跡及曲線SAR不同,多角度SAR最大限度地放松了飛行平臺對載荷數據獲取與成像觀測的約束,即具有常規飛行航跡下SAR多角度數據的獲取、處理和信息提取的能力,為實際應用中機動平臺的測繪和作業效率提供了有效保障。
多角度SAR具備下面幾個優勢:(1)大方位角帶來更高分辨率;(2)豐富的方位信息有利于目標識別和分類;(3)多角度觀測可以實現三維提取,且能有效減小、去除疊掩、陰影、透視伸縮等現象。由于上述優勢,多角度SAR受到了國內外學者們關注,但是大合成孔徑角、慣導精度等因素也對成像模型、數據處理方法等研究提出挑戰。自90年代以來,學者們利用多角度數據(如±45?聚束數據、圓周數據)對相關基礎性問題進行了深入的研究,例如成像模型[7]、高分辨成像方法[8]、三維特征提取[9-12]、各向異性散射特征分析[13]等。典型的研究成果如圖1所示。
隨著研究的深入,多角度SAR在GMTI方面的特性開始受到關注。對于場景中的動目標,多角度SAR可以實現長時間觀測,以及獲得動目標的豐富方位信息。長時間觀測特性有利于對目標的檢測和持續追蹤;豐富的方位信息有利于對動目標的速度進行估計。因此,多角度SAR-GMTI在近年來開始成為新的研究熱點。雖然目前未見星載多角度SAR系統的公開報道,相關研究以機載系統為主,但是機載研究已初步證明了多角度SAR在GMTI方面的潛力。

圖1 典型多角度SAR研究Fig.1 Typical multi-aspect SAR research results
在早期,研究人員主要將多角度SAR作為獲取長時間觀測數據的手段,以支持傳統的SARGMTI研究。而多角度SAR自身區別于傳統SAR的特點并未得到重視和挖掘。其主要研究思路以多通道技術為主。2010年Bin Guo等[14]利用多角度SAR多通道數據研究了基線估計、通道幅相不平衡校正等問題,實現了子孔徑圖像的雜波抑制及動目標檢測工作。2011~2014年,Ross Deming等學者[15-17]利用多角度SAR數據探討了基礎的偏置相位中心天線(Displaced Phase Center Antenna,DPCA)、沿航跡干涉(Along Track Interferometry,ATI)、雜波干涉抑制(Clutter Suppression Interferometry,CSI)技術的性能。2011年,英國學者B.Barber等人[18]利用多角度SAR數據研究了非高斯環境下的空時自適應(Space-Time Adaptive Processing,STAP)最優權矢量估計問題。
從上述介紹可以發現,在早期階段,多角度SAR模式僅作為獲取數據的手段。關于多角度SAR區別于SAR的新特性則研究較少,如信號模型分析等基礎問題也未得到深入研究。
隨著時間推移,研究人員開始關注挖掘多角度SAR自身特性來實現GMTI功能。2015年,法國空間局的Jean-Baptiste Poisson等學者[19]研究了單通道圓周孔徑下的動目標速度估計及真實軌跡重建問題,并利用獲取的X波段多角度SAR機載數據進行驗證。該方法充分利用了多角度SAR豐富的方位信息作為速度估計問題的解決思路。首先構建動目標軌跡重建方程組,提取同一動目標在不同方位孔徑圖像中的坐標以及散焦參數,輸入方程組求解得出動目標的真實坐標及運動速度。圖2為該方法的處理結果示例,綠線為動目標在不同子孔徑圖像中的偏移位置,紅線為動目標重建后的真實運動軌跡。可以看到紅線與SAR圖像中的道路走向吻合,驗證了方法的有效性。
我國多家機構的團隊也對多角度SAR-GMTI問題開展了研究。空天院研究團隊對多角度SAR動目標信號模型進行研究,提出了動目標顯性軌跡(動目標在SAR圖像中的信號形態)分析方法[20]。檢測算法方面,課題組引入了光學領域的背景差分算法,并應用于多角度SAR[21]。該方法將動目標與靜止場景進行分離,以實現動目標檢測。之后,課題組對背景差分法進行持續改進,提出了適用于多角度SAR的對數背景差分算法[22]。檢測示例結果如圖3。
2019年,研究團隊進一步實現了對數背景差分法向星載平臺的遷移[23]。國內的國防科技大學研究團隊針對多角度SAR動目標軌跡重建、動目標參數估計、動目標成像等問題也開展了工作[24-26]。
以上就是多角度SAR-GMTI發展概況的簡要介紹。可以看到在近十年以來,學術界開始逐步轉向挖掘多角度SAR-GMTI的自身特性和潛能。而且主要是以單通道系統、圖像序列思路為主。在檢測方面,如文獻[22]中通過仿真與實際數據處理表明在單通道多角度SAR可以實現對雜波內距離向、方位向運動目標的檢測。這是傳統單通道SAR不具備的能力。測速方面,文獻[19]也證明了多角度SAR可以實現動目標速度矢量的精確估計。因此可以認為,對現有的單通道系統,通過設計多角度模式可以拓展和提升其動目標檢測能力。
本課題組在完成多角度SAR的信號模型分析、檢測算法的設計之后,目前也在逐步考慮將多角度SAR與多通道算法相結合,以獲得更強的GMTI性能。

圖2 法國空間局多角度SAR動目標軌跡重建研究Fig.2 ONERA multi-aspect SAR moving target trajectory reconstruction

圖3 對數背景差分法檢測結果示例Fig.3 Example detection result of logarithm background subtraction
3 基于高分3號的多角度SAR-GMTI先導研究
相比于機載系統,星載系統可以實現更大的觀測場景,同時其運動相對穩定,不受飛行員操作及天氣的影響,因此具有更高的應用價值。為了獲得大范圍場景的動目標信息,各國機構通常會將機載SAR動目標研究成果逐步遷移到星載系統上。盡管已有在軌衛星的合成孔徑短,并不具備多角度SAR模式。但是我們仍然可以利用已有衛星資源做一定的先導研究,為未來的星載多角度SAR-GMTI奠定技術基礎。
因此,本節以國產高分3號SAR衛星為對象,圍繞以下3點開展研究:
(1)將對數背景差分檢測算法進行適應性改進,以便遷移到星載平臺。將對數背景差分法遷移到星載平臺,可以提升和拓展未來單通道星載多角度SAR的動目標檢測能力。實驗數據采用的高分3號凝視聚束實驗模式,以盡可能地獲得大的方位合成孔徑角。
(2)介紹主流的多通道算法的處理流程,并在傳統星載模式(僅有小合成孔徑角)下進行應用。通過理論分析和實際數據處理,來充分展示多通道算法的優勢及不足之處。數據采用的高分3號雙通道動目標實驗模式。這部分內容也是為多角度與多通道相結合奠定基礎。
(3)在回顧多通道算法的基礎上,為了開展多角度與多通道算法進行優勢互補的基礎研究,介紹了團隊開展的凝視聚束雙通道動目標實驗的研究進展。
3.1 對數背景差分法在凝視聚束模式中的應用
3.1.1 算法流程及其改進
在文獻[22]中提出單通道多角度SAR動目標檢測方法,對數背景差分法。該方法為圖像序列方法,其思路較為簡單。它主要是利用以下兩個現象。(1)對于靜止場景,其像素幅值在子孔徑圖像序列是緩慢變化。(2)對于動目標,其信號在圖像序列中快速移動,當移動到靜止場景中的某個像素時會引起高值。因此,可以利用圖像序列生成背景圖像(靜止場景),然后通過差分實現地雜波抑制。文獻[22]中的算法最初是面向機載多角度SAR情況,動目標的信噪比(Signal to Noise Ratio,SNR)較高,所以在差分后通過恒虛警(Constant False Alarm Rate,CFAR)檢測器即可實現動目標檢測。然而,由于在星載情況下動目標SNR低,當直接應用該方法時,輸出結果會有較高的虛警率。
因此,為了能夠適應星載平臺,文獻[23]提出了改進算法以適應星載平臺。具體而言,改進方法采用3步檢測方案來處理高虛警率問題。(1)第1步為CFAR檢測器。不同點在于,此處采用了較低的檢測閾值,從而最大限度完整保留動目標信號。由于閾值較低,第1步檢測中會包含較多虛警。(2)第2步是采用文獻[23]中改進的DBSCAN(Density-Based Spatial Clustering of Applications with Noise)聚類算法來進一步去除虛警。CFAR處理結果為二值圖,真實目標通常占據由相鄰像素構成的連續區域,它具有較高的密度,而虛警通常為噪聲和殘余地雜波產生,其密度較低。因此,利用改進的DBSCAN聚類方法可以進一步減少虛警。(3)第3步是采用目標追蹤算法來獲得最終檢測結果。其原理在于,動目標信號在圖像序列中是連續運動的。而虛假目標主要包含兩類,殘留地雜波和噪聲,殘余地雜波通常靜止不動,而噪聲則是隨機的。因此通過目標追蹤算法可以獲得最終檢測結果。這里采用卡爾曼濾波法,因為該方法性能較為優越。除了檢測方案的改進以外,由于高分3號數據產品通常以單視復圖像(Single Look Complex,SLC)形式來提供,因此這里采用子孔徑分割來獲得圖像序列作為檢測素材。由于無需回波,這也進一步擴大了其應用范圍。
除此以外,這里需要注意的是,高分3號凝視聚束模式僅有±1.7°合成孔徑角,仍然可以認為是近直線觀測幾何。該幾何下,目標主要存在方位散焦,對應于子孔徑圖像序列,則是沿方位向的運動。因此提出的算法可以實現對方位運動目標的檢測。

圖4 改進的對數背景差分法檢測流程Fig.4 Flowchart of modified logarithm background subtraction
改進的對數背景差分法流程圖如圖4所示。該算法包括以下步驟:(1)將SLC圖像進行子孔徑處理,來生成重疊子孔徑圖像序列(為了減小散焦效應對信雜比的影響,劃分時應截取較小頻譜得到低分辨圖像,具體見文獻[23])。并將子孔徑圖像按照對應的方位照射角來排列。抑制斑點噪聲并將圖像序列轉換為dB單位,以獲得重疊子孔徑對數圖像(Overlap Subaperture Logarithm Image,OSLI)序列;(2)對OSLI序列進行輻射校正,以抑制天線照射不均勻的影響;(3)將中值濾波器應用于OSLI序列以生成背景圖像;(4)使用輻射校正后的OSLI序列減去背景圖像,獲得前景圖像序列;(5)在每幅圖像上應用低閾值的基于高斯分布的雙參數均值CFAR檢測器以獲得一組二進制圖像結果;(6)應用改進的DBSCAN,去除虛警,同時得到潛在動目標聚類;(7)將聚類結果輸入到目標追蹤器中,去除殘余虛警,并獲得最終檢測結果作為輸出。
具體的操作步驟原理可見于文獻[23],因此這里就不再做具體的說明。
3.1.2 實際數據處理
3.1.2.1 高分3號數據介紹
高分3號是中國第1顆全極化C波段SAR衛星,于2016年在太原衛星發射中心成功發射[27]。該系統具有12種觀測模式,其分辨率范圍為1~500 m,幅寬對應為10~650 km。其天線類型為有源相控陣,可以在方位向控制波束指向,這也使其具備聚束觀測能力。高分3號以滑動聚束為常規模式,其方位合成孔徑角度較小。除此以外,還有凝視聚束實驗模式,該模式可以提供更長的觀察時間(即可以生成更多的子孔徑圖像),以及更大的合成孔徑角度,所以這里選擇凝視聚束模式的SLC圖像作為數據集。
待處理的SLC圖像于2017年采集自中國南京市。相關參數列于表1。由于全場景太大,這里選擇SLC圖像中的一個小區域作為實驗對象。相應的SAR圖像如圖5所示。水平和垂直方向分別是方位和距離向。圖中可以看到一個動目標信號,如藍色框所示。目標的散焦軌跡沿方位向跨越430 m左右。為了顯示動目標信號的運動,對該區域劃分出4幅子孔徑圖像,如圖5下部所示。從圖中可以發現,該目標在圖像中從右向左運動。本節實驗通過對該動目標進行檢測來驗證方法。

表1 數據參數Tab.1 Dataset parameters

圖5 所選小場景區域及相應子孔徑圖像序列Fig.5 Selected small scene and corresponding subaperture image sequence
3.1.2.2 數據處理結果
本小節給出所選高分3號小場景數據處理詳細結果,來驗證改進方法的有效性。
第1步是子孔徑處理以生成重疊子孔徑圖像序列(OSLI)。由于星載SAR信號的信噪比SNR較低[28],為了保證動目標信號不被強地雜波所掩蓋,這里對方位譜切割采用較小帶寬參數。具體而言,全孔徑SAR圖像對應方位向帶寬為19379.69 Hz,切割后每個子孔徑圖像對應帶寬為1495.4 Hz。因此,方位分辨率從0.33 m減小到4.25 m。為了獲得重疊子孔徑圖像序列,圖像間的帶寬重疊率設置為90%,由此獲得100幅圖像組成的圖像序列。然后,將各圖像轉換為dB單位,并應用5×5的均值濾波來減少相干斑噪聲。按照方位觀測角來進行排列,即可獲得OSLI序列。
機載多角度SAR通常具有很大的方位合成孔徑角,如圓軌跡可以達到360°。在此情況下,各向異性目標散射需要被考慮進來,否則算法性能會受到影響。因此需要將方位孔徑進行分割,然后再生成OSLI序列。然而,高分3號凝視聚束模式的方位角觀測角僅為3.56°,各向異性不明顯,因此在下面的實驗中將使用整個OSLI(包含100幅圖像)。這里以第18幅圖像為例,來說明每個步驟的處理結果。該子孔徑圖像如圖6(a)所示。
接下來是對OSLI序列應用輻射校正,以去除天線照射不均勻的影響。根據文獻[23],獲得的公共值為均值μ0=42和標準差σ0=7.09。然后利用該參數調整OSLI中圖像直方圖統計特性。圖7顯示了第18和68幅圖像在應用幅度歸一化前和后的統計直方圖。圖像中的紅線和綠線表示均值和標準差。左側是應用幅度歸一化之前的兩個圖像的直方圖。從子圖來看,第18和第68幅圖像的均值和標準差不相等,參數位置有明顯偏差。應用校正方法后,相應結果如右側中所示,可以發現均值與方差相等。將此過程應用于OSLI中的所有圖像,然后即可使用調整后的OSLI生成相應的背景圖像。

圖6 第18幅圖像處理結果示例Fig.6 The results of 18th image
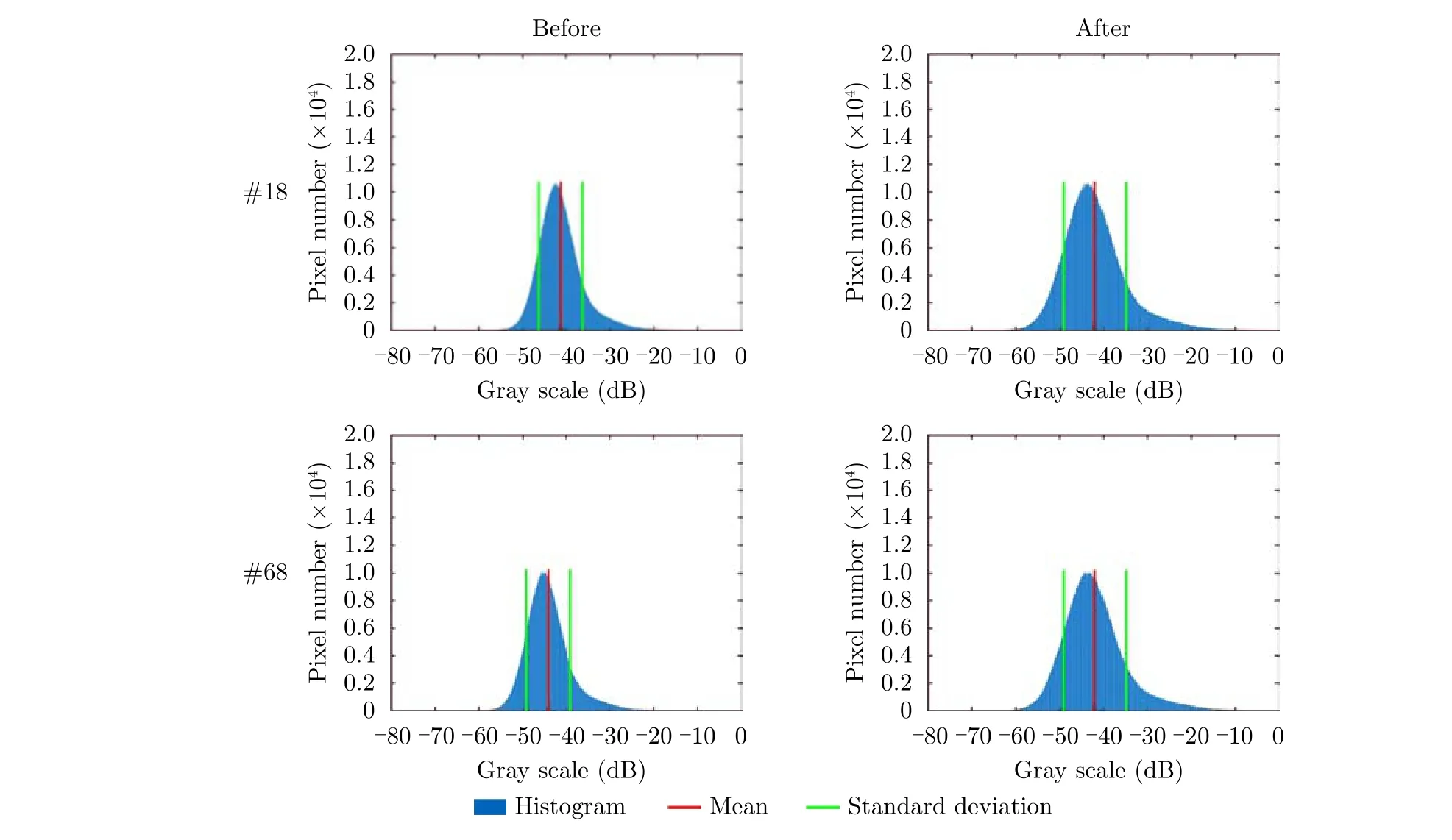
圖7 應用幅度歸一化前后的第18和68幅子孔徑圖像的直方圖Fig.7 The histogram of 18th and 68th image before and after adjustment
如前所述,實驗將使用整個OSLI序列(100幅圖像)進行操作。這里有兩個原因。首先,與機載多角度SAR情況案例相比,高分3號的方位信息更少,各向異性特征不明顯。另一個原因是,假如使用更多圖像,則生成的背景圖像將具有更好的質量,有利于獲得較好的檢測結果。生成的背景圖像如圖6(b)所示。比較圖6(b)和圖6(a),可以很明顯的發現藍色框中動目標在背景圖像中被過濾,由此驗證了背景生成步驟的有效性。
然后,通過差分操作即可抑制地雜波。對數背景減法算法包含變化檢測中的對數算子,以實現良好的雜波抑制性能。從圖6(c)所示的前景圖像中,雜波(即靜止場景)被很好地去除。可以看到,右側建筑結構和左側道路均被減去。子圖6(c)清晰顯示了動目標的信號,而前景圖像中的其他區域則類似于均勻的隨機噪聲,這對于目標檢測是非常有利的。
之后是CFAR檢測器進行初檢測。根據文獻[22],這里采用高斯分布來作為前景圖像的統計分布。前景圖像的直方圖如圖8所示。紅線是根據數據擬合的高斯分布,可以發現直方圖與該分布匹配。圖9顯示了第18幅圖像的CFAR檢測結果。我們可以看到檢測到目標的形狀與前景圖像中的信號形狀相匹配。此外,二值化中還有非常多的誤檢測結果。觀察圖9,我們可以看到目標信號呈現出高密度,而其余虛假目標則占有較少的像素,其密度較低。這也為應用改進的DBSCAN方法提供了基礎。

圖8 圖6(c)前景圖像的直方圖Fig.8 The histogram of image in Fig.6(c)
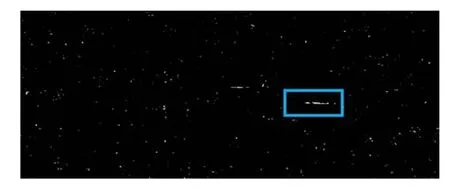
圖9 CFAR檢測結果Fig.9 CFAR detection result
下一步是應用改進的DBSCAN算法來進一步去除虛警。第18幅圖像的聚類結果如圖10所示。使用每個聚類的最小邊界框參數刻畫矩形來標注每個聚類。箭頭指向的聚類是動目標信號。與圖9中的CFAR結果相比,那些低密度虛假目標被去除。
經聚類處理后,最后一步就是通過目標追蹤算法來獲得最終結果。具體而言,將第1幅圖片中的聚類數量和其對應的位置作為追蹤的起始點來應用算法。然后使用后續圖像的聚類結果進行迭代來更新跟蹤結果。在第1幅聚類圖像中獲得10個聚類,因此有10條追蹤軌跡被初始化,如圖11(a)所示。其中藍色箭頭表示動目標信號,并利用最小邊界框的參數來標注被追蹤的聚類,其運動軌跡利用紅線進行標注。
圖11(b)為第18幅圖像的目標跟蹤結果。與圖11(a)相比,此時只有2個聚類仍在被追蹤。可以認為,第1幅圖像中的8個虛假目標已經被排除。從圖中可以發現,動目標信號的運動沿方位向進行運動。除動目標以外,還可以注意殘余的一個虛假目標位于動目標的左下方。盡管經過追蹤算法18次迭代,但可以發現其運動的軌跡非常短,幾乎可以認為在該區域靜止不動。運行100次追蹤迭代后,我們發現此聚類在第20次迭代后被排除。由于虛假目標是隨機出現在圖像中的,因此它們不會符合真實動目標信號的特征,無法被持續跟蹤。本文將10個聚類在100次迭代的追蹤過程中能夠持續追蹤的迭代次數與缺失次數進行統計,獲得如圖12所示的統計直方圖。

圖10 聚類結果Fig.10 Clustering result

圖11 第1幅與第18幅圖像追蹤結果Fig.11 Tracking results of 1st and 18th image
藍色和橙色分別對應于該聚類被有效追蹤的迭代次數以及無法被跟蹤的缺失迭代次數。其中第5個聚類為真實的動目標,可以發現其在100次迭代中都被持續追蹤。其余聚類為虛假目標,在第20次迭代后均停止更新軌跡。本文收集10條軌跡的長度,并根據文獻[23]來計算各聚類的等效方位速度,如表2所示。
由文獻[23]中,目標方位向散焦長度L與方位速度vy關系式為

其中,T0為合成孔徑時間。高分3號凝視聚束照射時間為12.5 s,設運動軌跡100 m為閾值時,對應等效方位速度為4 m/s。由此即可得到最終的檢測結果只有第5個聚類,即動目標信號被保留,從而證明了改進的對數背景差分法的有效性。
最后,為了實現更好顯示效果,將提取的追蹤信息疊加在分辨率更高的子孔徑圖像上作為最終輸出結果。跟蹤結果如圖13所示。紅線表示運動軌跡,紅框為動目標信號在當前圖像中的最小邊界框。
3.2 高分3號雙通道動目標模式研究
本節對主流的多通道算法進行介紹。首先介紹了多通道的主要處理流程,通過流程圖和實際數據處理給讀者一個整體的認識。以期為后續多角度和多通道算法相結合奠定一定的基礎。
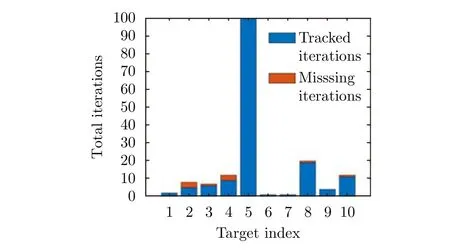
圖12 追蹤結果的統計直方圖Fig.12 Statistics of tracking results

表2 追蹤結果Tab.2 Tracking results
3.2.1 多通道算法的主要處理流程
盡管多通道方法名目較多,總體而言其主要處理流程存在一定的共性。因此這里對多通道算法共性的處理流程進行介紹。主要處理步驟流程圖如圖14所示。
首先是輸入多通道數據,對于數據類型可以是多種多樣的。典型的有SAR圖像、原始回波、非聚焦圖像(多普勒波束銳化圖像)、距離多普勒域數據等。通道數要求則至少為兩通道。
其次是數據預處理步驟,該步是至關重要的,直接影響到算法后續步驟的效果。本步驟主要包含基線時移去除、通道間幅相誤差校正。其中基線時移去除需根據算法的要求而定,并非必須進行處理。對于典型的DPCA,ATI方法必須去除基線帶來的時移相位,對于STAP算法,該相位則必須保留。實際處理中往往從數據中估計該相位,并進行補償。比較典型的去除方法有:(1)SAR圖像插值及配準;(2)去除不同通道的距離多普勒域信號干涉相位的線性項等。除時移相位以外,還需要對通道間的幅相誤差進行校正,這一步通常對于各方法都是必需的步驟。通道間的幅相誤差主要是由系統在設計和制造期間造成的,常用的處理方法有Ender提出的數字均衡方法[29]。數字均衡法在二維頻域對數據進行操作,可將幅相誤差、基線時移一起去除,因此對于DPCA等方法而言較為便利。當應用STAP時,需要先估計時移相位,再利用數字均衡去除幅相誤差和基線時移,最后再將時移相位補償回數據當中。
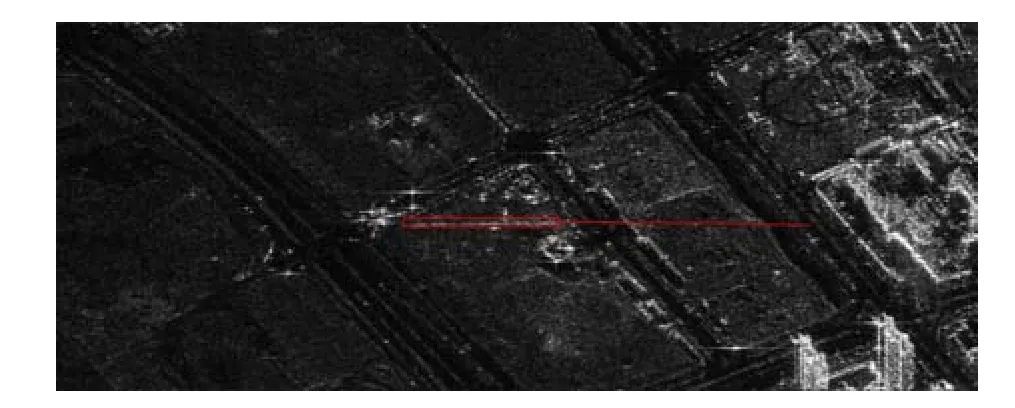
圖13 最終檢測結果輸出Fig.13 Final detection results

圖14 多通道算法主要處理流程Fig.14 Flowchart of multi-channel algorithm
第3步是雜波抑制,該步是多通道檢測的核心步驟。在預處理工作完成后,多通道間數據都得到很好的配準。因此對于靜止目標,其幅度和相位可以認為是不變的,經DPCA,STAP處理可以去除數據中的地雜波信號,只保留下動目標信號。由于地雜波被去除,相比于單通道算法,可以同時檢測雜波內和雜波外的動目標。這大大拓寬了動目標的檢測范圍,極大地提升GMTI性能。由于ATI采用的是相位信息(共軛相乘),理論上來講并不具備真正意義上的雜波抑制能力。所以雜波抑制主要由DPCA和STAP來實現。
第4步為檢測和虛警抑制。在雜波抑制后,往往存在殘余地雜波影響,因此需要CFAR檢測器來檢測動目標。檢測器的類型是較為豐富的,根據利用信息的不同,可以粗略分為幅度信息檢測、相位信息檢測、幅度相位雙參數檢測。最后再利用如聚類等后處理技術來進一步去除虛警,即可獲得檢測結果。
第5步為在獲得檢測結果的基礎上,求解動目標的運動參數。這里主要用到的方法是ATI方法。動目標的距離向速度可以直接由干涉相位求出,方位向運動通常利用匹配濾波器組來進行估計。最后利用距離向速度即可得到動目標的真實坐標。
最后是將檢測結果及動目標信息在圖片中進行標注,輸出GMTI結果。通常包含的信息有動目標的真實位置,運動方向,以及運動參數。
以上就是主要的處理流程。
3.2.2 實際數據處理
高分3號SAR系統的天線采用相控陣體制,長15 m,寬1.5 m。它可以在方位向分為兩個子板進行接收。基于此項功能,高分3號的觀測模式中也設計了雙通道GMTI實驗模式。該模式下,雷達處于條帶正側視情況,利用整個天線進行發射,兩塊子板進行接收[27]。
為了對前面介紹的流程進行驗證,選取了其中一景數據進行處理。該數據采集于2018年,照射區域為廣西省。數據格式為兩通道的單視復圖像,其像素尺寸為1.12 m×2.59 m,系統對應的有效基線為3.75 m。數據采集時的衛星速度為7569.5 m/s,綜合基線等參數可以計算出最大可檢測速度為28.26 m/s(101.7 km/h)。該參數也覆蓋了大部分地面動目標的速度。兩通道數據均為滿采樣,因而可以直接用于多通道SAR-GMTI處理。由于整景圖像數據量大,且為了更好的顯示效果,這里對其中一個子塊進行處理。圖15為選擇的小子塊區域的SAR圖像,縱向為方位向,水平為距離向。
選擇此場景的原因主要有以下幾點。首先在圖像中部可以看到一條很明顯的高速路,即廣昆高速。該道路走向沿距離向,因此動目標信號主要表現為偏移效應,且由于目標沿距離向運動,適合于多通道算法處理。其次,在該道路的上下方被山包圍,沒有密集的城市區域,因此可以保證大部分動目標都在該道路上。通過動目標信號是否可以重定位于該高速路上即可對算法的處理效果進行評估。
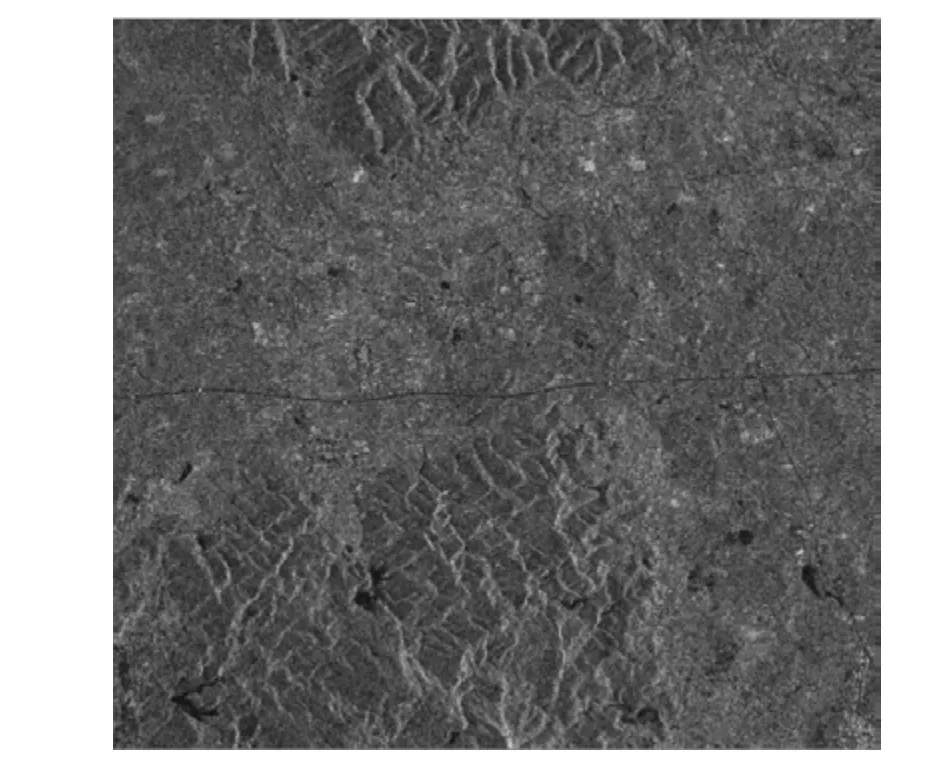
圖15 雙通道SAR數據中選擇的小場景區域Fig.15 Selected small scene in SAR data

圖16 預處理前后兩通道數據頻譜的干涉圖Fig.16 Interferograms of spectrum before and after preprocessing
因為高分3號僅具備兩個通道,所以處理方案選擇如下:(1)利用DPCA+CFAR檢測器實現動目標檢測;(2)利用ATI對檢測到的動目標完成測速工作。
首先對兩通道數據進行預處理,包括去除基線時延相位以及通道間的幅相誤差校正。這里采用的方法是Ender提出的數字均衡方法。將通道1、通道2數據變換到二維頻域,并且做干涉處理。得到二維頻譜的干涉相位如圖16(a)所示,
圖16中水平和豎直方向分別對應于距離頻率和方位頻率軸。從圖16(a)中可以清楚地看到,干涉相位沿方位向整體呈現出有規律的相位變化,即前述基線時延相位。應用數字均衡方法,得到預處理后的頻譜干涉相位如圖16(b)。可以看到,處理后該相位被去除,頻譜的干涉相位位于零相位附近(綠色),達到了預處理步驟的預期效果。然后對兩通道數據應用DPCA方法,得到雜波抑制后的DPCA圖像如圖17所示。
與原始SAR圖像比較,可以發現整個場景中的山脈、建筑等地雜波都被很好地去除。同時可以發現許多動目標信號,分布于廣昆高速所在位置的上下兩側。這也證明了距離向速度引起目標在方位向發生偏移的結論。
除動目標信號及噪聲以外,讀者可以看到圖像中還有類似山脈走向的信號。這些信號經分析可能的來源是山脈背對照射方向形成的陰影區。這是因為DPCA是復信號進行差分,而陰影區域屬于低散射區,相干斑隨機噪聲為主要信號源。因此無法實現強靜止目標做差分的效果。
對DPCA圖像應用CFAR檢測器來檢測動目標,即可得到如圖18所示的二值化的檢測結果,并用紅圈標注動目標。由于目標信號僅占幾個像素,相對于整個場景太小,因此為了更好的顯示效果,將其中一個動目標檢測結果進行局部放大。對應于下方箭頭所指的白色框區域。
在獲得二值化的檢測結果后,即可對動目標進行速度估計。將預處理后的數據共軛相乘并提取相位信息,獲得的ATI干涉相位如圖19所示。
與圖18類似,這里對動目標信號利用紅圈進行標注,同時對下方同一動目標進行放大顯示。可以發現圖像中整個靜止場景都在零相位附近,相位噪聲主要由相干斑隨機噪聲引起。仔細觀察可以發現,在圖中可以看到廣昆高速。這是因為道路屬于低散射區,因此相干斑噪聲產生了隨機的干涉相位,不在零附近。由此可以看到廣昆高速的形狀。放大圖片對應于下方的一個動目標,動目標由黑色橢圓標注。可以看到該目標的相位相對于背景并不為零,且整個目標所占像素的相位都呈現出相近的相位值。利用該相位即可獲得動目標的距離向速度,通常需要對動目標信號的所有像素值做平均來估計干涉相位。這樣的好處是可以減小隨機相位噪聲的影響。

圖17 DPCA結果Fig.17 DPCA results
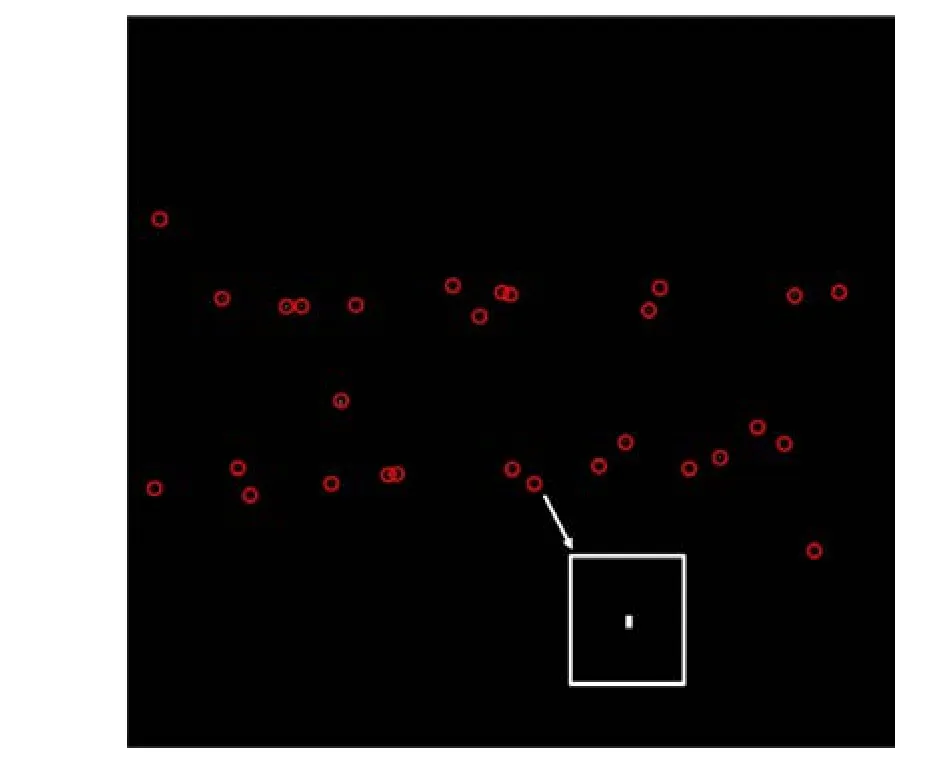
圖18 CFAR結果Fig.18 CFAR results
利用前面得到的二值化檢測結果提取每個動目標的干涉相位,由此計算動目標的距離向速度值。在此基礎上即可得到動目標的真實坐標,結合速度的符號可以得到其運動的方向。將上述信息在SAR圖像中進行標注,得到輸出的GMTI最終結果,如圖20所示。
圖中動目標運動方向由顏色和三角箭頭指向表示,三角位置為真實坐標。可以看到動目標基本都被重定位回廣昆高速上,由此驗證了多通道方法的有效性。
3.3 高分3號雙通道凝視聚束模式研究
由3.2小節可得,多角度模式和多通道方法結合可以實現優勢互補。首先,雙通道可以為多角度SAR提供更強的雜波抑制功能。其次,由于多通道技術對動目標徑向速度敏感,因此從多角度觀察可以提高檢測性能。第三,多角度SAR的高分辨率特性使獲得分米級動目標聚焦圖像成為可能,這對目標識別極為有利。
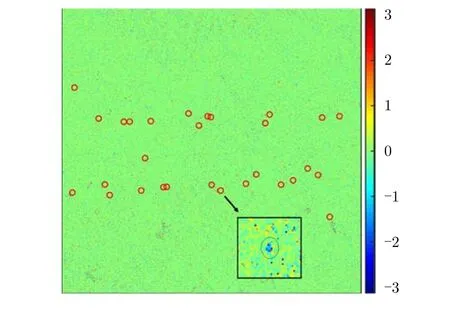
圖19 ATI干涉相位圖Fig.19 ATI phase map
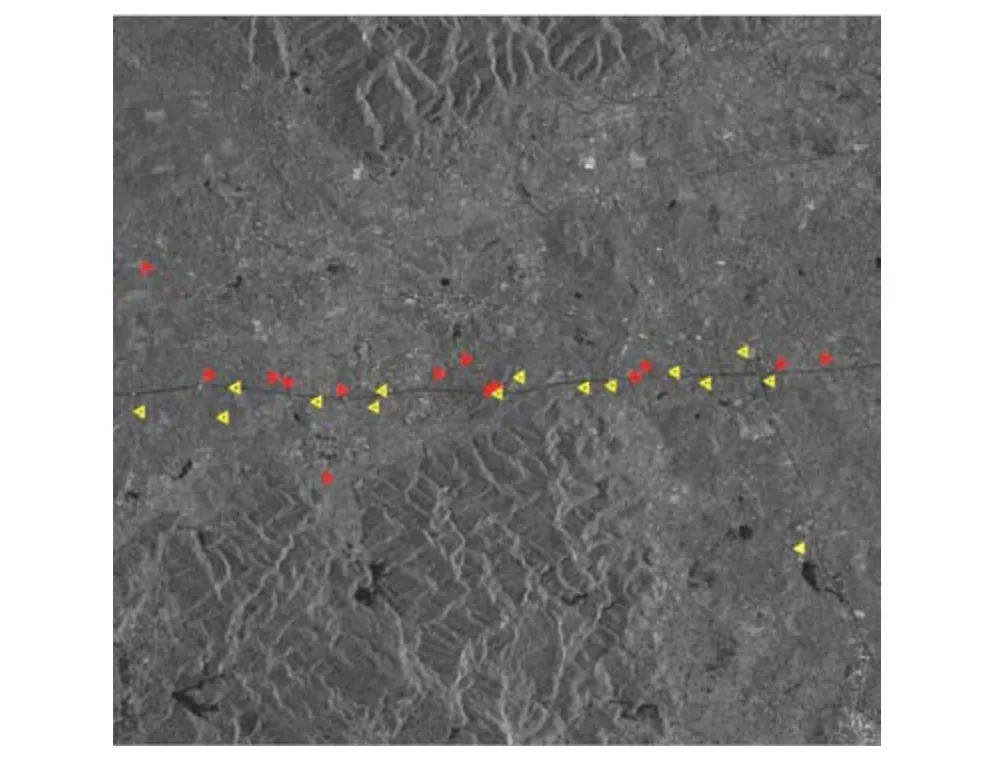
圖20 GMTI輸出結果Fig.20 GMTI result
基于這些優點,課題組與航天五院開展了模式論證和數據獲取工作。按照計劃,在進行含有合作動目標的正式實驗之前,首先要進行非合作目標的實驗,以評估模式設計參數和數據,為正式實驗做準備。第1批非合作數據于2019年6月獲得,正式實驗已于2019年11月份開展。由于正式實驗數據仍在處理中,這里主要針對第1次非合作實驗進行介紹。
首次實驗于2019年6月在北京懷柔區進行。主要參數如表3所示。
這里有幾點需要注意。高分3號的凝視聚束模式方位觀測角為3.4°,相應照射時間約15 s。與條帶雙通道模式(照射時間1 s)相比,這是一個相對較長的時間,足以記錄目標較為復雜的運動。
該區域的光學圖像如圖21所示。水平為距離向,垂直方向是方位向。從該圖可以看到有多條道路,包括高速公路和鐵路。這些道路可以提供足夠數量的動目標。此外,根據道路方向,可以保證獲得距離向運動目標和方位向運動目標。左邊是市區,可以看到很多建筑物。右邊是農田。該場景相應的SAR圖像如圖22所示。可以看到圖中紅圈標注的道路圍成的三角形特征與光學圖片中的特征一致。
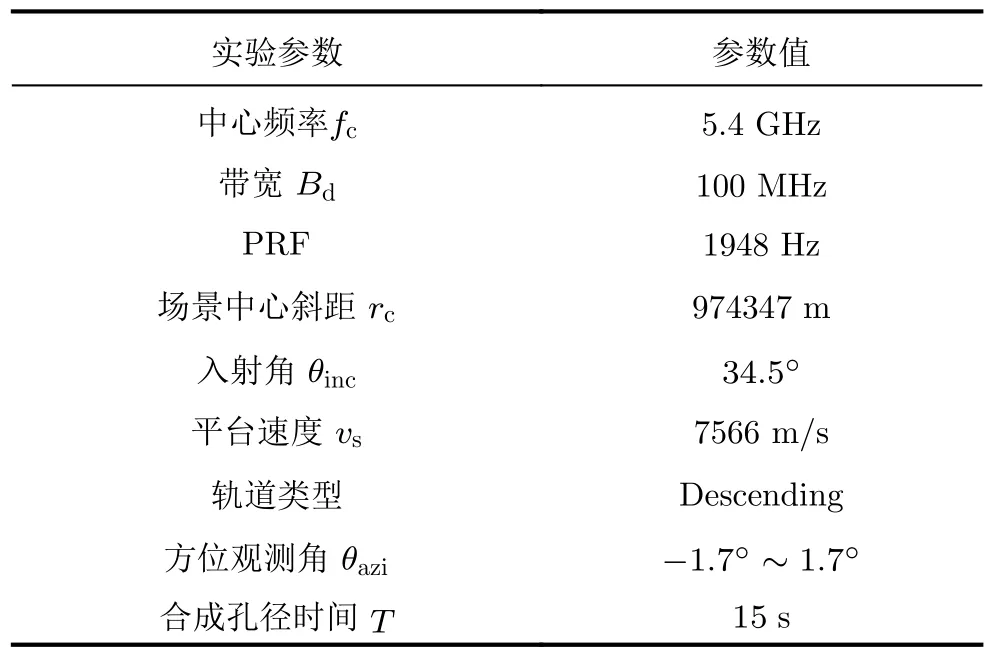
表3 實驗參數Tab.3 Experiment parameters

圖21 照射場景光學圖片Fig.21 Optical image of scene

圖22 照射場景全孔徑SAR圖像Fig.22 Full aperture image of the scene
SAR圖像是通過BP算法生成,因為該方法較為靈活,且可以生成同一網格下子孔徑圖像。可以發現,SAR圖像中的場景與光學圖像場景一致,如左側的市區和中部區域的多條道路。讀者還可以注意到,在圖像的底部和上方區域存在模糊信號。這是因為第1次實驗中設置的PRF不夠高,導致靜止場景的模糊能量混了進來。在下面的處理中,選取無模糊的部分進行幅相校正后即可應用DPCA,ATI方法。
3.3.1 數據預處理
由于高分3號為兩通道數據,所以采用兩通道DPCA和ATI方法進行處理。對于這兩種技術,如3.2.1節中介紹的,需要去除基線引起的時移相位,同時補償通道間的幅相誤差。而較為通用的方法是Ender[29]提出的數字均衡方法。與上一節中類似,我們將數字均衡法應用于兩個通道生成的復圖像,但是處理結果發現該方法無法有效實現時移相位去除。兩通道圖像在處理前后的干涉相位圖如圖23所示,子圖23(a)為處理前的結果,圖23(b)為處理后的結果。
在圖23(a)中可以看到沿方位向的線性相位。經處理后的圖23(b)中,可以看到圖像中部的相位約為零(綠色顏色),但是沿方位向仍然存在一定的線性相位。這與我們的預期結果不相符。經分析,產生這樣的結果的原因如下。由于高分3號的相控陣天線在聚束模式下是離散掃描的,即每經過固定脈沖數量(Stationary Number of Pulses,SNP)后,波束的方位指向轉動0.01°。然而,不同的波束指向(或不同的SNP下),通道間的幅相誤差也不同,此誤差是時變的。當利用SAR圖像作為輸入時,累計的誤差就導致產生了不理想的處理結果,引起性能下降。解決此問題的方法是在回波域中對每一組SNP信號分別應用數字均衡方法進行誤差校正和基線相位去除。本文對第1組SNP信號應用數字均衡法,得到處理前后的干涉相位圖像如圖24所示。
從圖24可以看到在校正后,線性相位與相位誤差被消除,回波的干涉相位集中在零相位(綠色顏色)。為了進一步說明不同SNP之間相位誤差的差異,本文提取了第1組和第11組SNP的補償相位。為了抑制相位噪聲,對信號沿距離向進行了平均,得到補償相位如圖25所示。橫軸為多普勒,縱軸為干涉相位。可以看到二者都包含一個線性項,但是二者的相位曲線也有明顯的差異,由此證明了相位誤差的時變性。
糾正每組SNP的相位誤差后,兩個通道的數據就被配準,在成像后即可應用DPCA和ATI方法。
3.3.2 數據初步結果
ATI使用通道1圖像乘以復共軛通道2圖像。由于兩個通道已得到配準,因此靜止雜波具有零相位,動目標由于自身運動具有非零相位,利用該相位可以實現徑向速度估計。DPCA方法將復圖像相減來抑制地雜波。然后即可利用CFAR檢測器檢測動目標。凝視聚束模式觀測時間長,圖像分辨率高,如果使用全孔徑SAR圖像,則目標的距離走動效應會很嚴重。因此,這里對子孔徑圖像執行ATI和DPCA。

圖23 校正前后干涉相位圖Fig.23 ATI phase maps before and after correction
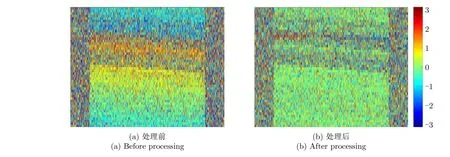
圖24 第1組SNP信號校正前后干涉相位圖Fig.24 ATI phase map of 1st SNP signal before and after correction

圖25 第1組和第11組SNP補償相位曲線Fig.25 Compensated phase of 1st and 11th SNP signal
ATI的結果如圖26所示。可以看到,該圖像的大部分區域為綠色(零相位),與預期相符。在左上方區域看到一個非零相位的區域。該區域對應為建筑物產生的陰影,因此主要為相干斑噪聲信號為主,表現為非零相位。左下角非零相位是潛在動目標信號。
然后應用DPCA技術,結果如圖27所示。對比左側的原始SAR圖像,從圖中可以看到大部分地雜波被消除了。而需要潛在動目標信號被保留下來。由此可以利用CFAR算法進行目標檢測。
上述處理結果也初步證明雙通道方法在凝視聚束雙通道數據上的有效性,為后續深入研究奠定了基礎。
4 結論與展望
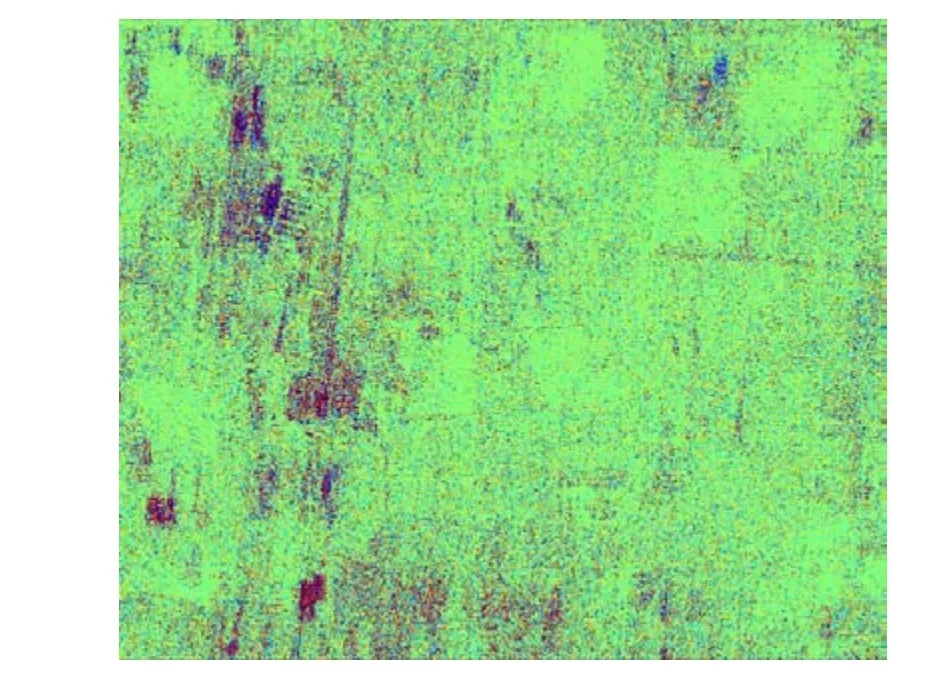
圖26 ATI處理結果Fig.26 ATI result
本文詳細討論了近年來多角度SAR-GMTI的發展現狀。重點介紹了研究團隊圍繞高分3號開展的研究。具體包含以下3點內容。(1)將提出的對數背景差分檢測算法遷移到高分3號單通道凝視聚束模式。針對星載SAR動目標信噪比較低,引起的檢測虛警高的問題,進行了算法改進。設計了3步檢測方案,并以實際數據進行驗證。(2)為實現多角度與多通道方法優勢互補,回顧了主流的多通道算法。介紹了多通道方法的共性處理流程,然后處理了高分3號雙通道動目標數據。(3)在了解多通道方法的基礎上,進一步介紹了雙通道凝視聚束SAR動目標實驗的先導性研究。

圖27 原始SAR圖像與DPCA處理結果Fig.27 Original SAR image and DPCA result
未來的研究方向還包括在連續多角度數據的研究基礎上,實現離散多角度數據的綜合利用。在實際應用中,往往存在獲取離散多個角度的數據,如衛星平臺、大機動平臺僅有可能在特定的幾個方位角度上獲取數據。因此,通過對連續的多角度數據的研究,以期為實際應用中的離散化多角度數據的綜合利用提供支撐。
上述研究實現了單通道雷達系統運動目標檢測功能拓展、多通道雷達系統運動目標檢測性能提升的原理性驗證。同時,也為在軌及規劃星載SAR單通道GMTI工程實現、未來星載多角度SAR時序動態觀測新型工作模式設計等奠定可行性研究基礎。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
