伐木運輸車一體機的設計及研究
2020-05-18 02:41:13郭家鵬肖垚朱宇璇李杭呂國鋒孫超趙秋宇盧禹含王粵
科技創新與應用 2020年14期
關鍵詞:設計
郭家鵬 肖垚 朱宇璇 李杭 呂國鋒 孫超 趙秋宇 盧禹含 王粵


摘? 要:針對我國目前伐木方式仍以人工為主,花費人力較大,設計了一款伐木運輸車一體機,此款設備能夠在伐木的同時收集木材,并可以把木材直接送到運輸車上,提高了伐木效率,具有很好的推廣前景。
關鍵詞:伐木;多功能;設計
中圖分類號:S776? ? ? ? ? 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)14-0088-03
Abstract: In view of the fact that the current logging mode in our country is still dominated by manual labor, which costs a lot of manpower, a logging and transportation vehicle integrated machine is designed. This equipment can collect wood while logging, and can send the wood directly to the transportation vehicle, which improves the logging efficiency and has a good prospect of promotion.
Keywords: lumbering; multi-function; design
根據現有傳統伐木設備、挖掘機設備以及工程車的結構[1],加入自己創新元素從而改造成為雙臂伐木機。采用與挖掘機、翻斗車相結合的方式,上半部分沿用挖掘機的動臂、搖臂的連桿機構,手臂段采用仿生人手握杯時的形狀,而下半部分仿照挖掘機的旋轉機身設計以及翻斗車車身的形狀,從而設計出本款中小型雙臂伐木機[1-3]。具體結構圖如圖1所示。
1 伐木運輸車一體機設計
1.1 機械臂的設計
整個機械手臂的受力支撐以及鏈接車體的重要部分,使其可以繞著車體進行180°旋轉使其可以連接到載物區。具體如圖2所示。
1.2 負臂機構設計
用于連接機械手臂前段的仿生手型結構如圖3所示。本設備可以沿豎直方向轉動90°從而方便使木材將近水平的放置[2]。
1.3 轉軸機構設計
參考挖掘機的機身與底座的鏈接裝置,制作了相應的轉動模塊,應用此模塊可以使機械手臂在箱體兩側360°進行旋轉,從而能在伐木工作過程中使機械手臂能夠旋轉到需要的位置同時滿足后續切割工作的需求[3]。具體結構如圖4所示。
1.4 機械爪機構設計
在機械手臂的下端有進行切割工作的刀鋸,與手臂頭上半部分的滑輪進行配合,從而進行木材的裁斷工作[4]。當不工作時刀具可收回到刀鋸套中。此刀鋸的鏈條可以轉動,減小了切割木材的難度,從而加快了切割速度。具體結構如圖5所示。
1.5 儲存箱的設計
車廂設計成梯型結構,其內部和車壁帶有滾輪,此裝置可以在木材堆放滿時方便木材的推動,同時也方便木材從車體的兩側滾入箱體中,減小了摩擦力。具體如圖6所示,
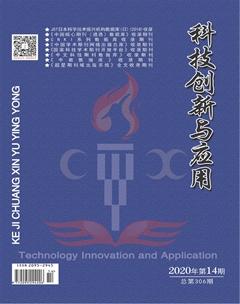
當木材放滿時此設備開始工作,在伸縮式液壓缸的作用下使推板向前移動,同時依靠底部和兩側的滑輪作用把木材推出儲存箱[5]。
當木材放滿時此設備開始工作,在伸縮式液壓缸的作用下使推板向前移動,同時依靠底部和兩側的滑輪作用把木材推出儲存箱。升降平臺工作示意圖如圖7所示。
1.6 箱體抬升結構的設計
本設計采用直推式傾卸機構,具體結構如圖8所示,這種機構結構簡單緊湊、舉升效率高、工藝簡單、成本較低采用單缸垂直下置時,油缸推力可以作為車廂的舉升力,因而所需的油缸功率較小。但是采用單缸時機構橫向強度差[6],而且有缸的推成較大。
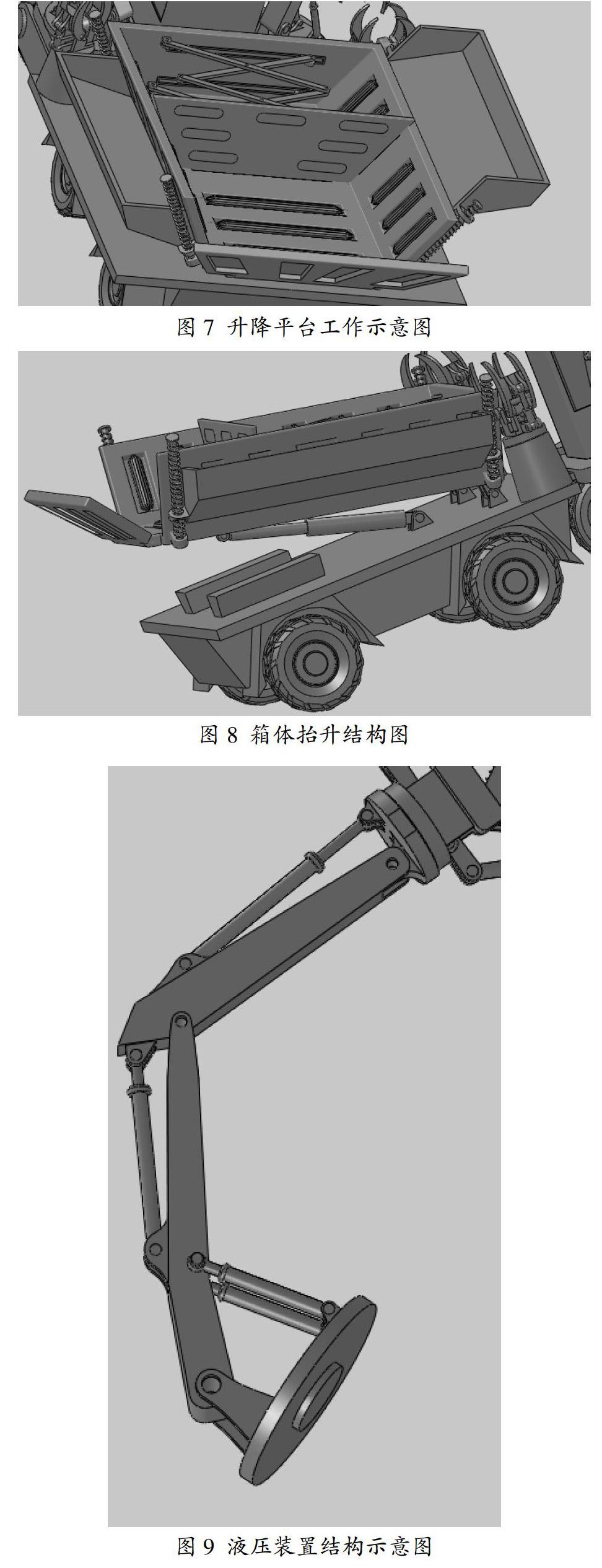
1.7 液壓缸的設計
液壓缸采用的是伸縮式液壓缸具有二級活塞,伸縮式液壓缸中活塞伸出的順序是從大到小,而空載縮回的順序則一般是從小到大。伸縮式液壓缸可實現較長的行程,而縮回時長度較短,結構較為緊湊。此種液壓缸常用于工程機械和農業機械上。有多個一次運動的活塞,各活塞逐次運動時,其輸出速度和輸出力均是變化的。具體結構如圖9所示。
2 創新點
本砍樹機將運輸、砍伐、切割、木材修整和雙機械手臂等功能結合為一體,在同一個設備上完成伐樹自動化,節省了大量的勞動力,增加了工作速度,減輕了伐樹的繁重工作。
參考挖掘機底座結構的設計,采用了具有旋轉功能的盤狀結構,因此,當全部的工作結束以后,通過旋轉將手臂機構轉到車體的兩側,確保車體的平衡。
3 結束語
針對目前市場上現有傳統伐木設備存在的缺陷基礎上,對傳統伐木機進行了創新設計,通過一系列的創新設計,在傳統伐木機基礎上進一步擴展了多種使用功能,本設計可以替代現有的伐木設備,在原有基礎上簡化操作方式,簡化了裝運、切割、收集等工作的負擔及其費用,作用是節約了勞動成本提高了生產力。使其具有更好的實用價值。
參考文獻:
[1]趙文銳,劉晉浩.伐木聯合機的現狀及發展[J].林業機械與木工設備,2008(11):10-12.
[2]汪甲新,馬立祥.四輪獨立驅動的大型路面施工設備全液壓行走系統的分析與研究[J].建設機械技術與管理,2007,149(3):85-87.
[3]魏占國.林木聯合采育機底盤設計理論研究與應用[D].北京:北京林業大學,2011.
[4]孫艷青.日本研制的林業機器人[J].機器人技術與應用,1997(5):6-7.
[5]趙增奎.某型號注塑機械手的動力分析及振動控制[D].中國海洋大學,2004.
[6]潘海兵.草方格鋪設機器人振動系統的研究[D].東北林業大學,2006.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04