自供電式車位狀態(tài)識(shí)別與發(fā)射裝置設(shè)計(jì)
2020-05-18 02:44:03師國強(qiáng)龐忠兆鄒華杰張維
科技視界 2020年8期
師國強(qiáng) 龐忠兆 鄒華杰 張維
摘 要
針對(duì)室外分布分散車輛停車位狀態(tài)識(shí)別問題,有效解決電池和外接電源線的供電限制,提出一種基于感應(yīng)與自供電一體化的車位狀態(tài)識(shí)別與發(fā)射裝置。該裝置能有效地將車輛沖擊力/重量轉(zhuǎn)化成電能,由儲(chǔ)能電路實(shí)現(xiàn)自供電,通過無線傳感節(jié)點(diǎn)發(fā)射感應(yīng)信號(hào),經(jīng)終端接收完成識(shí)別。具有節(jié)約能源,綠色環(huán)保,安裝方便,成本低的特點(diǎn)。
關(guān)鍵詞
車位;識(shí)別;自供電;無線傳感
中圖分類號(hào): U495;TP391.44;TN92 ? ?文獻(xiàn)標(biāo)識(shí)碼: A
DOI:10.19694/j.cnki.issn2095-2457 . 2020 . 08 . 83
Abstract
Aiming at the problem of recognizing the status of the outdoor distributed parking space, which can effectively solve the power supply limitation of batteries and external power lines, a parking space status recognizing and transmitting device based on the integration of induction and self-powered supply is proposed. The device can effectively convert the impact force / weight of the vehicle into electrical energy, which can be self-powered by the energy storage circuit. The sensor signal is transmitted by the wireless sensor node and recognized by the terminal. It has the advantages of energy saving, environmental protection, convenient installation and low cost.
Key words
Parking space; Recognize; Self-powered; Wireless sensor
0 引言
隨著社會(huì)的發(fā)展與進(jìn)步,機(jī)動(dòng)車保有數(shù)量激增,如何能夠高效停車已成為困擾人們的一大難題。為了能從根本上提升停車場(chǎng)車位的使用方便性以及管理效率,停車位狀態(tài)識(shí)別系統(tǒng)應(yīng)運(yùn)而生。現(xiàn)有的停車位狀態(tài)識(shí)別系統(tǒng)中無論是感應(yīng)系統(tǒng)還是發(fā)射系統(tǒng)都需要配備供電裝置,當(dāng)應(yīng)用在分布分散停車位時(shí),會(huì)受到電池和外接電源線的供電限制,使得成本增加、安裝復(fù)雜。
1 停車位狀態(tài)識(shí)別系統(tǒng)的現(xiàn)狀分析
現(xiàn)有的停車位狀態(tài)識(shí)別系統(tǒng)的種類很多,它們的技術(shù)原理,實(shí)現(xiàn)方式以及應(yīng)用場(chǎng)合各不相同,主要有:線圈識(shí)別、視頻識(shí)別、超聲波識(shí)別、激光識(shí)別、磁力識(shí)別、紅外線識(shí)別等[1-3]。地感線圈識(shí)別[4]將感應(yīng)線圈埋設(shè)在車位地下,通過電感器件進(jìn)行識(shí)別;視頻識(shí)別[5]是一種基于視頻圖像分析和計(jì)算機(jī)視覺技術(shù)處理,通過攝像頭對(duì)指定區(qū)域目標(biāo)物體進(jìn)行檢測(cè)跟蹤的檢測(cè)技術(shù);超聲波識(shí)別[6]是在每個(gè)車位上方安裝超聲波探測(cè)器,通過回波檢測(cè)來判斷車位上有無車輛停泊;激光識(shí)別[7]與超聲波識(shí)別類似,通過點(diǎn)測(cè)量進(jìn)行識(shí)別,易受到車輛和人的阻擋,從而造成誤判;磁力識(shí)別[8]是通過檢測(cè)器里的磁阻傳感器感應(yīng)磁場(chǎng)的變化進(jìn)行識(shí)別;紅外識(shí)別[9]是利用發(fā)光管發(fā)射紅外光后,經(jīng)反射回來被接收管接收完成識(shí)別,易受環(huán)境條件的影響。現(xiàn)有的識(shí)別系統(tǒng)主要存在問題如下:(1)易受環(huán)境條件的影響,從而造成誤判;(2)需要配置供電裝置才能工作。
本文針對(duì)現(xiàn)有停車位識(shí)別系統(tǒng)的不足,提出一種自供電式停車位狀態(tài)識(shí)別與發(fā)射裝置,能有效解決需額外配置供電裝置的限制。具有節(jié)約能源,綠色環(huán)保,安裝方便,成本低的特點(diǎn)。
2 總體方案設(shè)計(jì)
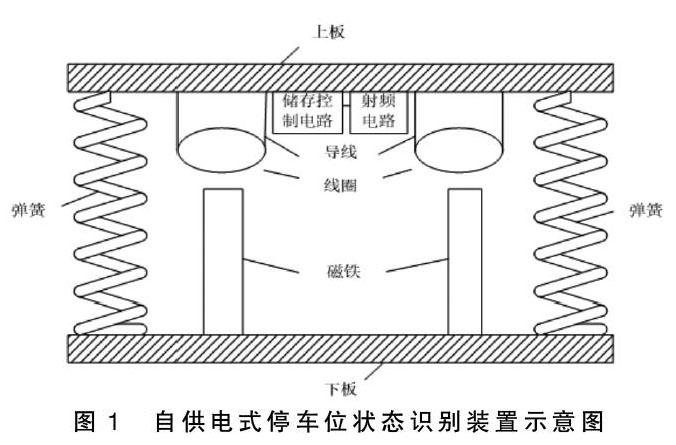
本文所設(shè)計(jì)的停車位狀態(tài)識(shí)別裝置方案如圖1所示,由感應(yīng)裝置、自供電裝置和射頻電路所組成。
其中,感應(yīng)裝置與自供電裝置一體化,由能量采集裝置、儲(chǔ)能與控制電路所組成。彈簧垂直安裝在上、下板中間,永久磁鐵垂直安裝在下板上,線圈垂直安裝在上板,并正對(duì)著磁鐵,儲(chǔ)存與控制電路以及射頻電路安裝在上板底部,并由導(dǎo)線將感應(yīng)線圈和電路板連接起來。該裝置整體嵌入于停車位底下,上板置于路面,下板置于底部。
其工作原理如下:當(dāng)車輛進(jìn)入停車位時(shí),上板受到車輛重力載荷而產(chǎn)生變形,迫使線圈向下移動(dòng),同時(shí)壓縮彈簧變形,導(dǎo)致切割磁場(chǎng)后在線圈中產(chǎn)生感應(yīng)電流而發(fā)電,一方面經(jīng)儲(chǔ)能與控制電路實(shí)現(xiàn)自供電功能,另一方面驅(qū)動(dòng)射頻電路發(fā)射車輛進(jìn)入的感應(yīng)信號(hào);同理,當(dāng)車輛駛出停車位時(shí),上板受到車輛重力載荷撤掉,彈簧恢復(fù)形變,迫使上板及線圈向上移動(dòng),導(dǎo)致切割磁場(chǎng)后在線圈中產(chǎn)生感應(yīng)電流而發(fā)電,經(jīng)儲(chǔ)能與控制電路實(shí)現(xiàn)自供電功能,進(jìn)而驅(qū)動(dòng)射頻電路發(fā)射車輛駛出的感應(yīng)信號(hào);經(jīng)終端接收完成識(shí)別,從而實(shí)現(xiàn)停車位占空識(shí)別功能。
2.1 自供電裝置
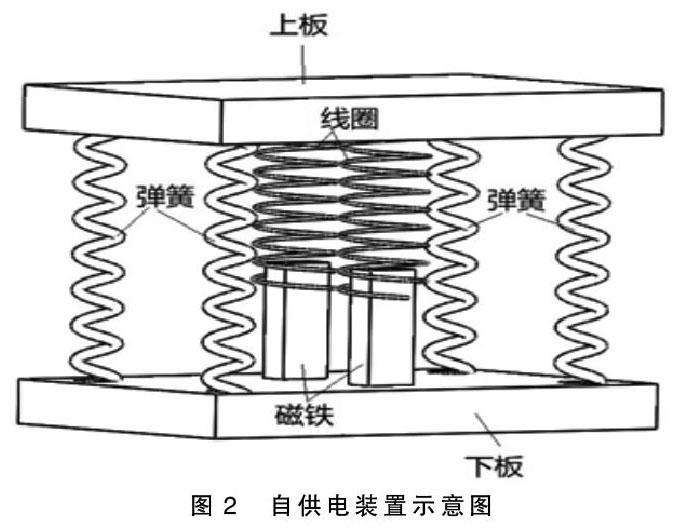
自供電示意圖如圖2所示。由上板、下板、磁體、線圈和彈簧所組成。彈簧垂直安裝在上、下板中間,永久磁鐵垂直安裝在下板上,線圈垂直安裝在上板,并正對(duì)著磁鐵。當(dāng)車輛進(jìn)入或離開停車位時(shí),車輪壓到上板使其受到車輛重力載荷而向下運(yùn)動(dòng),帶動(dòng)線圈先向下移動(dòng),同時(shí)彈簧壓縮變形,當(dāng)車輪脫離板時(shí),被壓縮的彈簧恢復(fù)形變,推動(dòng)上板向上運(yùn)動(dòng),帶動(dòng)線圈先向上移動(dòng),這一來回運(yùn)動(dòng)都會(huì)導(dǎo)致線圈切割磁場(chǎng)產(chǎn)生感應(yīng)電流而發(fā)電,經(jīng)儲(chǔ)能與控制電路實(shí)現(xiàn)自供電功能。
2.2 儲(chǔ)能控制電路
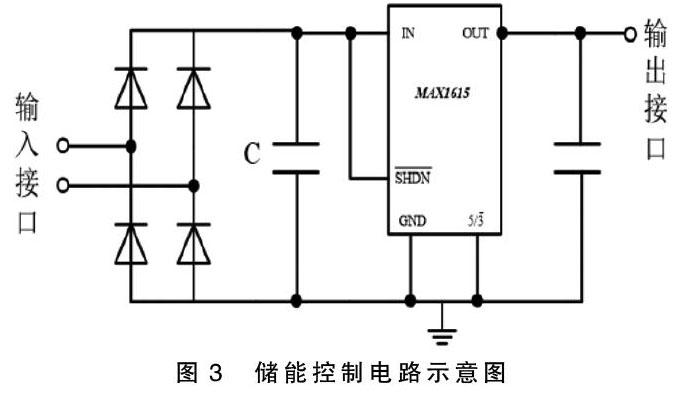
圖3所示為儲(chǔ)能控制電路。該電路安裝在圖2所示上板的一個(gè)槽內(nèi),由整流電路、電容C以及恒壓芯片MAX1615所組成。輸入接口與感應(yīng)線圈相連接,輸出接口與無線傳感模塊中射頻電路的接口相連接,可將感應(yīng)線圈中產(chǎn)生的交流電壓轉(zhuǎn)化成恒定直流電壓5V/3.3V,從而驅(qū)動(dòng)射頻電路工作。
2.3 射頻發(fā)射電路
圖4所示為射頻發(fā)射電路。該電路安裝在圖2所示上板的另一個(gè)槽內(nèi)。電源接口(Vcc)與儲(chǔ)能控制電路的輸出接口相連接,使能端(En)與感應(yīng)信號(hào)相連接,天線端用來發(fā)射信號(hào)。得到電源驅(qū)動(dòng)和使能信號(hào)后,由天線發(fā)射感應(yīng)信號(hào),被終端接受后識(shí)別。
3 總結(jié)
本文設(shè)計(jì)的自供電式車位狀態(tài)識(shí)別與發(fā)射裝置,基于能量收集技術(shù),應(yīng)用磁電換能,實(shí)現(xiàn)自供電與感應(yīng)一體化。能有效解決需額外配置供電裝置的限制,具有節(jié)約能源,綠色環(huán)保,安裝方便,成本低的特點(diǎn)。在分布分散停車位狀態(tài)監(jiān)控方面具有十分廣闊的市場(chǎng)前景。
參考文獻(xiàn)
[1]Cheung S Y, Pravin v. Traffic surveillance by wireless sensor networks: final report[R]. University of California, Berkeley, Jan. 2007.
[2]Ding J. Vehicle detection by sensor network nodes[D]. Berkeley: University of California, 2004.
[3]Benjamin Coifman. Identifying the onset congestion rapidly with existing traffic Detectors[J]. Trans-291.
[4]王敏,王娟,鮑丙豪.基于超聲波和環(huán)形線圈的車位信息檢測(cè)[J].信息技術(shù),2016(03):54-56+61.
[5]趙茜.基于圖像處理的車牌識(shí)別系統(tǒng)的研究[D].天津:天津大學(xué),2006.
[6]趙雨,趙盛萍,陳羅艷,代勇,羅順.無線車位檢測(cè)系統(tǒng)的應(yīng)用研[J].天津科技,2017,44(03):60-63.
[7]葛紅豆.智能停車場(chǎng)系統(tǒng)關(guān)鍵模塊研究與設(shè)計(jì)[D].南京:南京理工學(xué),2017.
[8]喬超.車位狀態(tài)探測(cè)方法研究[D].太原:中北大學(xué),2015.
[9]施小宇,徐彪,余甘霖,龍維.基于紅外線檢測(cè)的停車場(chǎng)智能引導(dǎo)系統(tǒng)研究與實(shí)現(xiàn)[J].電子制作,2013(08):43-44.