基于北斗系統(tǒng)的滴滴軌跡安全監(jiān)測與預(yù)警系統(tǒng)
2020-05-19 14:57:40董云飛王晨晨趙金輝樊博威
科技風(fēng) 2020年14期
關(guān)鍵詞:人工智能
董云飛 王晨晨 趙金輝 樊博威

摘?要:“滴滴打車”儼然成為一種具有時(shí)代特色的交通方式,然而近年來,和以往的傳統(tǒng)出租車相比,網(wǎng)約車主身份背景參差不齊、難以對其有系統(tǒng)的約束,導(dǎo)致安全問題頻頻發(fā)生。為了將其優(yōu)勢保持并更加安全,本文將設(shè)計(jì)一種運(yùn)用北斗導(dǎo)航對行車軌跡進(jìn)行實(shí)時(shí)檢測,輔以面部識別、語音識別模塊對司機(jī)進(jìn)行實(shí)時(shí)監(jiān)督,最終當(dāng)乘客發(fā)生或面臨危險(xiǎn)時(shí),遠(yuǎn)程操控鎖死汽車,并自動報(bào)警傳遞位置信息,保障乘客生命安全。
關(guān)鍵詞:人工智能;面部識別;北斗導(dǎo)航;后臺鎖定;安全與預(yù)警系統(tǒng)
1 緒論
安全問題是交通服務(wù)業(yè)的重中之重,但其卻容易在互聯(lián)網(wǎng)的隱蔽下滋生詬病。到目前為止,“滴滴”一直在如火如荼的發(fā)展,但其存在的安全隱患被高速的發(fā)展所掩蓋。
有數(shù)據(jù)顯示,在2016年的三月,滴滴出行使用量已超越Uber,日活躍用戶也是四倍于Uber。然而從滴滴成立之初到目前為止,事故接二連三,2018年女學(xué)生遇害更是將滴滴出行推向了風(fēng)口浪尖,順風(fēng)車業(yè)務(wù)一度面臨下線的危機(jī)。
雖然各種各樣的安全措施不斷出臺,可是已經(jīng)停滯的順風(fēng)車卻遲遲沒有重新上線的趨勢。對此,本文介紹的預(yù)警系統(tǒng)將從路徑、人員識別、語音監(jiān)測這幾個(gè)方面對乘客進(jìn)行實(shí)時(shí)保護(hù)。
目前語音技術(shù)已廣泛運(yùn)用于我們的生活當(dāng)中,若用到車內(nèi)預(yù)警中,也會產(chǎn)生奇效。
確認(rèn)司機(jī)身份是保證乘客安全的根本條件,而以人體特征為識別的對象,準(zhǔn)確度高,可以大大增加司機(jī)個(gè)人信息的可控性。
文中將論述采取航跡推算法與北斗導(dǎo)航組合汽車定位方案,使得即使在北斗導(dǎo)航衛(wèi)星信號收到影響的時(shí)候,也可以通過航跡推算,借助車載里程傳感器,提供一種高精度高、可靠性的定位模式。
2 功能概述
這套操作系統(tǒng)具備人員識別核查、位置鎖定、航向監(jiān)測、車內(nèi)對話分析監(jiān)督、遠(yuǎn)程鎖車以及自動報(bào)警的功能。行車前的人員核查是最基礎(chǔ)的保障,基于北斗信號增強(qiáng)后的定位和航跡推測可以實(shí)時(shí)檢測到乘客所在的具體位置,當(dāng)位置異常時(shí),則可以通過后臺鎖車并自動報(bào)警。而車上攜帶的AI語音會對車內(nèi)交流進(jìn)行對話分析,從各個(gè)方面保護(hù)乘客的乘車安全。
3 創(chuàng)新方案
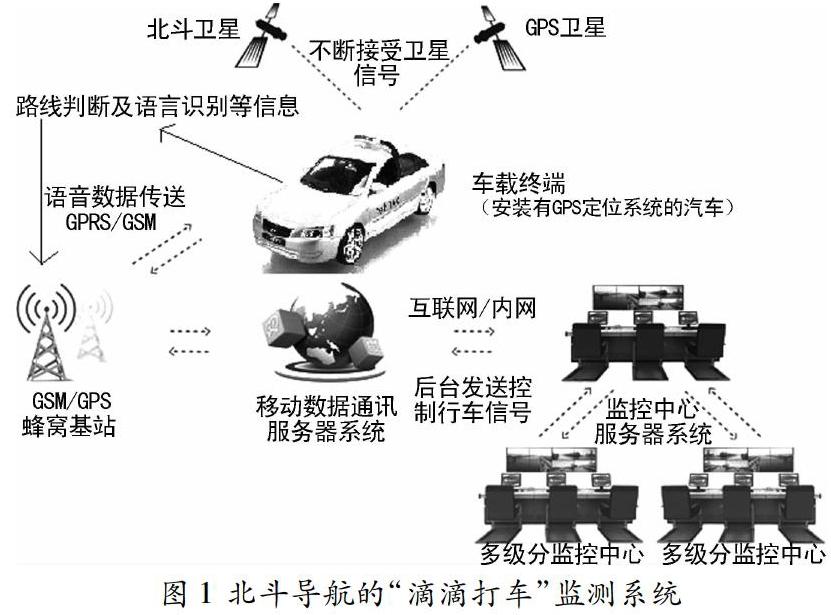
本團(tuán)隊(duì)設(shè)計(jì)了一款基于北斗導(dǎo)航的“滴滴打車”監(jiān)測系統(tǒng)。通過地基信號增強(qiáng)以及航跡推測算法,對“滴滴車”進(jìn)行精準(zhǔn)定位,并結(jié)合面部識別、以及AI語音識別進(jìn)行分析,估算乘客的危險(xiǎn)系數(shù),來選擇是否要遠(yuǎn)程報(bào)警或者遠(yuǎn)程鎖車。對司機(jī)起到極大的震懾作用,提高了犯罪成本,使乘客的人身安全免遭侵害。
本套系統(tǒng)的設(shè)計(jì)初步思想就是行程比對,通過航跡推測的方式,可以防止當(dāng)汽車駛進(jìn)地下車庫、荒郊密林的地方,實(shí)現(xiàn)定位無死角,使汽車的位置實(shí)時(shí)處于監(jiān)管范圍之內(nèi)。
4 基于北斗系統(tǒng)的滴滴軌跡安全監(jiān)測與預(yù)警系統(tǒng)技術(shù)報(bào)告
4.1 面部識別系統(tǒng)
設(shè)計(jì)目的:駕駛門禁系統(tǒng)監(jiān)督一車一人相對應(yīng),核實(shí)司機(jī)信息。
概述:司機(jī)通過手機(jī)APP上傳本人的面部圖片,通過Adaboost算法提取面部特征值后,將其對應(yīng)的數(shù)據(jù)存至數(shù)據(jù)庫。開車前手機(jī)終端進(jìn)行識別,識別后將信息傳至控制器,若識別信息與數(shù)據(jù)庫信息匹配,控制器則驅(qū)動磁力鎖開鎖。司機(jī)則可用鑰匙解除汽車鎖定。否則汽車無法解鎖。
具體技術(shù):
(1)采集司機(jī)照片;
(2)首先對圖像進(jìn)行灰度化、直方圖均衡化處理;
(3)面部信息檢測;
(4)Adaboost算法,可以與Haar特征相結(jié)合,使算法的性能大幅度提升。在進(jìn)行識別的時(shí)候則可以得到更好的效果。
(5)通過PCA進(jìn)行人臉識別:
①取訓(xùn)練集下指定個(gè)數(shù)的圖像X=[MN,S]。
②計(jì)算每行的均值,每行的元素與均值相減。
③計(jì)算X的協(xié)方差矩陣C。
④訓(xùn)練投影到特征空間Y=PX=R,S。
⑤從大到小的順序排列,特征空間P=R,MN。
⑥計(jì)算出C的特征值與特征向量。
⑦測試集投影,若測試集有Q張圖像,那么降維后矩陣為R,Q。
⑧歐氏距離法,每一張圖像R,1與特征值R,S最相近的一個(gè)圖像,識別為該類。
⑨求出識別概率。特征臉方法經(jīng)過K-L變換后由原來的高緯度向量轉(zhuǎn)換成低緯度向量子空間,達(dá)到了非常好的降維效果,而且其運(yùn)算復(fù)雜度低識別速度快,同時(shí)易于實(shí)現(xiàn),識別率高。
本文所提出的通過面部特征的識別,來控制汽車能否啟動的方案,其中主要包含三大部分:移動客戶端、駕駛控制端和后臺的存儲數(shù)據(jù)的服務(wù)器。其系統(tǒng)框圖如圖2所示。
人臉識別系統(tǒng):
(1)開發(fā)平臺的搭建:在Android系統(tǒng)上搭建平臺進(jìn)行面部特征的抓取。
(2)用戶注冊模塊的實(shí)現(xiàn):身份證注冊,APP獲取到人臉圖像后,將上傳至服務(wù)器,保存在某個(gè)文件中,并將其有關(guān)圖片查詢的信息保存,進(jìn)行統(tǒng)一管理。
(3)人臉識別模塊的實(shí)現(xiàn)。
(4)服務(wù)器端的實(shí)現(xiàn)。
4.2 語音識別系統(tǒng)
設(shè)計(jì)目的:從對話中獲取信息,判斷乘客是否安全。
概述:本設(shè)計(jì)選通過Linux嵌入式板卡來實(shí)現(xiàn)語音識別的任務(wù)。對原有系統(tǒng)進(jìn)行改進(jìn),設(shè)計(jì)了一個(gè)成本較低、識別率高、體積小的語音識別系統(tǒng)。
具體技術(shù):本套系統(tǒng)的聲音鑒別需要在Linux系統(tǒng)上實(shí)現(xiàn),使用編寫好的聲卡驅(qū)動程序,通過圖形用戶界面調(diào)用聲卡驅(qū)動程序來將收集到的聲音信號進(jìn)行錄制,應(yīng)用程序可以通過socket發(fā)送或接收數(shù)據(jù),所以我們通過socket將音頻文件進(jìn)行傳輸,在Ubuntu Linux環(huán)境下優(yōu)化音頻并改變文件格式,通過百度AI進(jìn)行識別,識別結(jié)果開發(fā)板進(jìn)行后續(xù)的處理控制。
AI語音系統(tǒng)設(shè)計(jì):
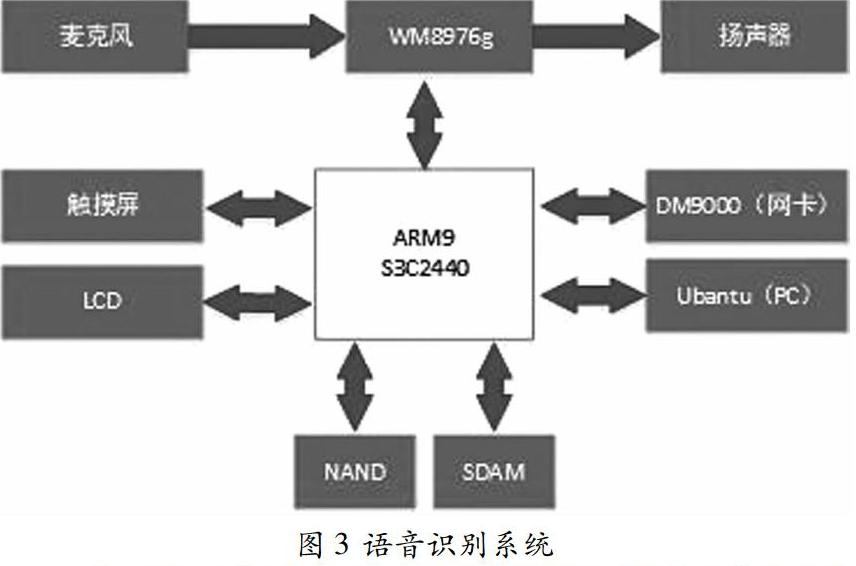
(1)硬件系統(tǒng):本語音識別系統(tǒng)應(yīng)用的主控芯片為S3C2440。
(2)軟件系統(tǒng):這里使用的是Linux操作系統(tǒng)邏輯框圖。
音頻采集的時(shí)首先會打開聲卡,設(shè)置好采樣頻道數(shù)并量化位數(shù),之后讀取車內(nèi)音頻信號,并將音頻信號存儲,最后關(guān)閉聲卡。
4.3 后臺鎖定
目的:當(dāng)語音分析、路線判斷出現(xiàn)問題時(shí),可以控制車輛的鎖定。
概述:該技術(shù)主要運(yùn)用遠(yuǎn)程通訊控制模塊、行車控制器,在車內(nèi)乘客遭遇危險(xiǎn)時(shí)遠(yuǎn)程鎖定車輛。
具體技術(shù):為了遠(yuǎn)程鎖車避免發(fā)生事故、減少經(jīng)濟(jì)損失,我們的設(shè)計(jì)將先行判斷汽車的行駛狀態(tài),再通過北斗定位,智能的對汽車實(shí)施鎖車操作。
智能鎖車系統(tǒng)設(shè)計(jì):
遠(yuǎn)程鎖車系統(tǒng)主要包含三部分內(nèi)容,起遠(yuǎn)程監(jiān)控作用的監(jiān)控中心,收發(fā)指令的通訊控制模塊和行車制動的行車控制器。
通訊控制模塊靠近裝載機(jī)進(jìn)行安裝,這樣便于直接發(fā)送信號給行車控制器。行車控制器可以說是汽車運(yùn)行的重中之重,車上的各個(gè)傳感器、電磁閥都要由行車控制器控制。行車控制器將會收集汽車行駛的轉(zhuǎn)速信息、整車角度信息、行駛速度信息、底盤傾斜角度信息等狀態(tài)信息。我們就通過行車控制器對汽車的運(yùn)行狀態(tài)進(jìn)行監(jiān)控,遠(yuǎn)程通信控制模塊將汽車的信息進(jìn)行傳輸處理,結(jié)合北斗提供的定位信息,監(jiān)控中心則可以對目標(biāo)車的車況了如指掌。
鎖車時(shí),首先限制汽車的行駛速度,再限制汽車前進(jìn),最后限制發(fā)動機(jī)的啟動能力,將行駛中的汽車逐步拉停,而這些步驟則需通過閥控制器、鏟斗控制閥、動臂控制閥、啟動繼電器、發(fā)動機(jī)的ECU來進(jìn)行實(shí)現(xiàn)。所有的鎖車操作均由行車控制器執(zhí)行,行車控制器損壞或缺失,裝載機(jī)將無法運(yùn)行。
4.4 北斗系統(tǒng)定位
目的:實(shí)時(shí)監(jiān)測航跡,維護(hù)人身安全。
概述:當(dāng)前位置的經(jīng)緯度可以通過北斗衛(wèi)星獲取,同時(shí)也可運(yùn)用北斗衛(wèi)星自帶的雙向衛(wèi)星通訊服務(wù)。由于地形和環(huán)境帶來的干擾,衛(wèi)星通訊無法正常進(jìn)行,定位則會受到限制。為了避免在偏僻環(huán)境中定位不準(zhǔn)確而使乘客產(chǎn)生危險(xiǎn),這套系統(tǒng)則通過北斗定位與航跡推算相結(jié)合的方式,獲取相對準(zhǔn)確的位置信息。
具體技術(shù):DR算法則是利用現(xiàn)有的坐標(biāo),在傳統(tǒng)定位方式受限制的情況下,我們就可以對已知的行駛方向、行駛速度和行車之間進(jìn)行分析,對目標(biāo)位置產(chǎn)生一個(gè)合理的估算。
這種方式不受外界環(huán)境影響,但需要每隔一段時(shí)間進(jìn)行檢測。通過車輪上搭載的電磁計(jì)數(shù)傳感器,通過計(jì)算車輪旋轉(zhuǎn)發(fā)出的脈沖數(shù)量,便知車在這段時(shí)間的行程。
根據(jù)在目前時(shí)間的行駛路程,可以計(jì)算出汽車行駛的速度。當(dāng)計(jì)數(shù)時(shí)間比較短的時(shí)候,該時(shí)刻的平均速度則可以近似等于瞬時(shí)速度。
組合導(dǎo)航算法:
汽車正常行駛的時(shí)候通過北斗導(dǎo)航對其進(jìn)行定位,而當(dāng)衛(wèi)星信號受到阻攔的時(shí)候,則啟動DR算法對汽車的當(dāng)前位置進(jìn)行合理推測,以信號消失前的準(zhǔn)確坐標(biāo)為原點(diǎn),通過車輪上的測速器獲取汽車路程、速度信息,并根據(jù)行駛路線來推測每一時(shí)刻汽車的位置:
式中,x(t),y(t)是t時(shí)刻車在參考坐標(biāo)系下的位置;x(t-1),y(t-1)是t-1時(shí)刻車在參考坐標(biāo)系下的位置;θ是測向速度與參考坐標(biāo)系北向的夾角。在這種情況下,通過近似隧道的軌跡為一長直路線,則可以根據(jù)信號消失前的坐標(biāo)來對汽車的位置進(jìn)行定位。
式中,λ(t)、L(t)分別為航跡推算過程中車的實(shí)時(shí)經(jīng)度和緯度;λ0、L0分別為起點(diǎn)經(jīng)緯度。
5 應(yīng)用前景
在滴滴打車事故頻發(fā)的情況下,軌跡安全監(jiān)測與預(yù)警系統(tǒng)地合理應(yīng)用能夠很好改善這種情況。讓乘客的人身安全得到更大的保障。利用軌跡安全監(jiān)測可以實(shí)時(shí)追蹤車輛的軌跡,并與實(shí)際路線進(jìn)行比較,在行駛路線出現(xiàn)問題時(shí),后臺可以鎖停車輛并報(bào)警,可以很大程度上降低受害者的危險(xiǎn)。
猜你喜歡
西安航空學(xué)院學(xué)報(bào)(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(shù)(2018年9期)2018-11-02 05:31:34
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學(xué)與玩(2017年12期)2017-02-16 06:51:12