基于實車測試的AEB系統測試評價方法研究
2020-05-25 10:15:46季中豪周景巖楊天棟張慧楊路鵬
汽車技術 2020年5期
季中豪 周景巖 楊天棟 張慧 楊路鵬
(中國汽車技術研究中心有限公司汽車工程研究院,天津 300300)
主題詞:主動安全 自動緊急制動 測試評價方法 實車測試
1 前言
為有效減少交通事故發生的概率及其造成的人身傷害及經濟損失,汽車主動安全技術得到了汽車行業的廣泛關注,自動緊急制動(Automatic Emergency Braking,AEB)系統就是其中發展較為成熟且應用廣泛的安全系統。
行業內各機構不斷完善升級AEB 系統的同時,制定了各類測試評價方法。2012 年以來,歐盟新車安全評鑒協會(European New Car Assessment Programme,Euro-NCAP)、美國國家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)、日本新車安全評鑒協會(Japan New Car Assessment Program,J-NCAP)等汽車測評機構根據本國交通環境的實際狀況,相繼發布了各自的AEB系統測試評價規程,并將其納入新車主動安全評價體系。2017 年,中國汽車技術研究中心將AEB 系統納入2018 年版中國新車評價規程(China New Car Assessment Program,C-NCAP)中,并根據中國的實際道路情況,制定了相應的測試和評價方法[1]。
根據AEB系統的技術發展和實際交通事故場景的需要,各試驗規程的測試評價內容也在逐年豐富。目前國內已有的AEB 測試評價方法仍然存在測試場景缺乏、評價參數單一的問題,例如測試場景缺少夜間測試、目標物難以覆蓋實際交通情況、僅通過避撞表現來評價系統等。
本文結合實車AEB 系統的測試結果,從測試場景和評價方法角度出發,研究各測試場景和多種評價參數對AEB 系統測試評價的合理性與必要性,并給出相應的建議。
2 AEB系統及其測試評價方法
AEB 系統主要包括AEB 和前向碰撞預警(Forward Collision Warning,FCW)兩項功能。系統通過毫米波雷達、激光雷達、攝像頭等傳感器來探測前方目標信息(如相對車速、距離等),并實時計算與目標的碰撞危險程度。在出現碰撞危險時,系統會通過聲音、圖像等方式向駕駛員發出碰撞預警,在碰撞危險達到制動臨界點時,系統會采取緊急制動避免碰撞[2]。
奔馳汽車公司和美國Eaton 公司發布的研究結果顯示,如果駕駛員提前0.5 s對碰撞危險情況作出響應,就可避免60%的追尾事故發生,而在追尾事故中,駕駛員已經采取制動但制動力不足的情況約占49%[3-4]。AEB 系統可以很好地起到提前預警和提供充足制動力的作用,在很大程度上避免追尾事故的發生、降低碰撞的損害。
隨著AEB系統的普及和相關技術的不斷發展,AEB系統的測試評價方法也在不斷更新。以Euro-NCAP 為例,相較2019 年版的測試規程,2020 年版Euro-NCAP即將新增十字路口工況、近端有障礙物的騎車人工況、后向自動緊急制動工況等AEB系統的測試內容。測試場景更加豐富,評價方法更加合理是AEB 系統測試的趨勢。
目前,AEB系統的主要測試場景包含車對車和車對行人兩類,即車輛追尾自動緊急制動系統(AEB CCR)試驗和行人自動緊急制動系統(AEB VRU_Ped)試驗,分別模擬了車輛間不同類型的碰撞追尾事故場景和車輛與弱勢道路使用者(如行人、騎車人等)之間的碰撞事故場景。AEB 系統的評價方法則是根據車輛是否完成避撞或碰撞時的速度,結合不同測試場景的重要程度,對AEB系統進行整體評分。
3 國內外測試評價規程
3.1 2018年版C-NCAP AEB系統測試規程
《C-NCAP 管理規則(2018年版)》中AEB CCR 試驗包括前車靜止(Car to Car Stationary,CCRs)、前車慢行(Car to Car Moving,CCRm)、前車制動(Car to Car Braking,CCRb)3 種測試場景,每種場景對AEB 系統的AEB和FCW 功能進行測試。此外,為防止AEB 系統出現誤作用影響駕駛員的正常駕駛,還需進行相鄰車道車輛制動測試和鐵板測試。詳細測試矩陣如表1所示。
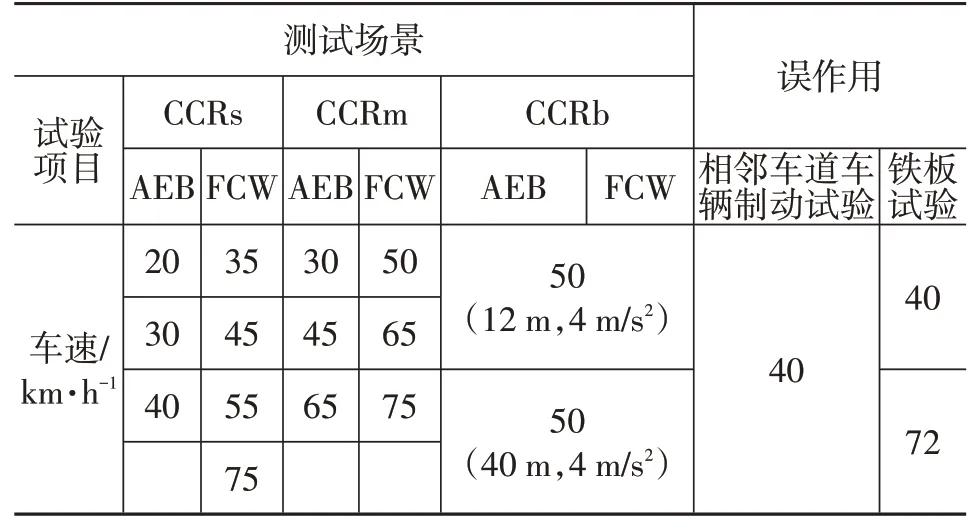
表1 AEB CCR測試矩陣
AEB VRU_Ped測試模擬車輛與橫穿道路的行人發生碰撞的場景,主要包括行人從遠端和近端穿行兩種場景,即車輛碰撞遠端成年行人(Car-to-VRU Far side Adult,CVFA)和車輛碰撞近端成年行人(Car-to-VRU Near side Adult,CVNA),發生碰撞的位置點有車前端25%、50%、75%共3種。詳細測試矩陣如表2所示。
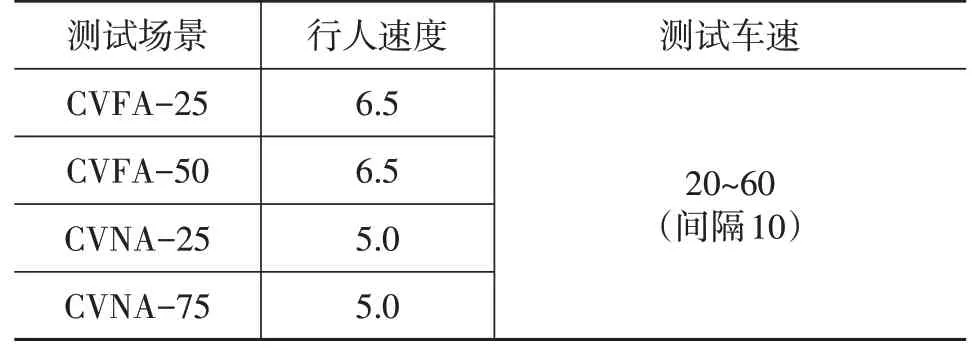
表2 AEB VRU_Ped測試矩陣 km/h
3.2 C-NCAP與Euro-NCAP測試規程比較
對比兩種測試規程,測試場景主要有以下幾種區別:Euro-NCAP 的AEB CCR 測試設置了車輛偏置作為變量(-50%、-75%、100%、75%、50%);Euro-NCAP 的AEB VRU 測試設置有部分夜間測試場景;Euro-NCAP的試驗目標除成年目標外還包括兒童和騎車人等目標。
此外,兩測試規程在各場景測試車速的范圍及其梯度、發生碰撞后的試驗方法等方面也存在區別。
而Euro-NCAP 和C-NCAP 的評價規程均采用車輛的避撞表現作為系統性能的評價參數。但Euro-NCAP評分的測試場景更多,車輛偏置、夜間測試等場景在評分中也占有很大的比重。
4 測試方法的研究
隨著AEB 系統的不斷開發升級,裝配AEB 系統的車輛逐漸增多,如何全面、科學、有效地對AEB 系統進行評價是測試工作開展的關鍵。對比2018 年版C-NCAP 和2019 年版Euro-NCAP 測試規程,本文從碰撞點偏置測試、夜間測試、兒童和騎車人目標測試、彎道測試4 個測試場景的角度,結合實車測試的數據,分析上述場景變量對AEB系統表現的影響。
AEB 系統實車測試選擇某款傳統動力SUV(車輛A)和某款新能源電動汽車(車輛B)進行,兩車AEB 系統傳感器類型均為單目攝像頭型,攝像頭視場角為38°,安裝于車輛前風窗玻璃頂部中央位置,可支持車、成人、兒童、騎車人等目標的識別。兩車的AEB 系統均包括FCW 功能和AEB 功能,并都采用制動后直接達到所需最大減速度的制動策略。
分別對兩車進行碰撞點偏置測試、夜間測試、兒童、自行車目標測試和彎道測試,每組至少采集2組有效數據(AEB 系統正常觸發),并將每組試驗結果按AEB 系統功能觸發的時間分為試驗組1、2(觸發較早的為試驗組1,較晚的為試驗組2),從AEB 功能表現、FCW 功能表現、漏識別等方面比較試驗結果。
4.1 碰撞點偏置測試
在AEB CCR 測試中,通過將測試車輛的行進軌跡向左或右偏置一定距離,可以進行不同碰撞點的測試,測試場景如圖1所示。
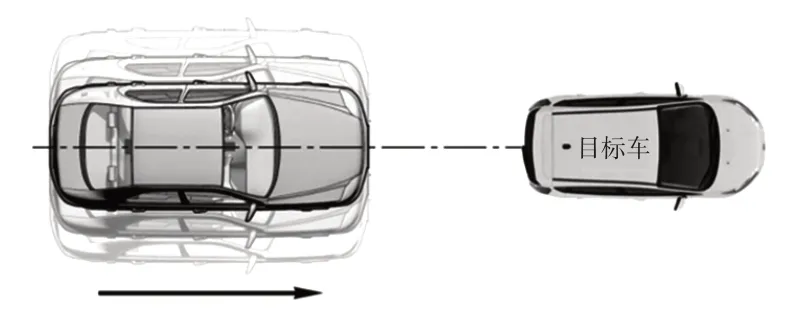
圖1 碰撞點偏置測試示意
本文設置了CCRs場景來研究不同偏置的碰撞點對AEB 系統表現的影響。在不同測試速度下,進行左、右偏置50%和正對的試驗。如果試驗中車輛的AEB 系統未觸發,即FCW 功能未發出警示且AEB 功能未采取制動,則視為該次試驗中系統對目標出現漏識別。本文對車輛A 或車輛B 在各場景中出現漏識別的試驗次數進行統計,并計算出漏識別情況占對應場景的總試驗次數的比例作為漏識別率。
兩車AEB 功能的表現如圖2 所示。車輛A 在部分偏置場景中功能觸發時機較晚,但整體試驗結果顯示兩場景下的功能幾乎同時觸發。車輛B 在正對場景中功能觸發時機比偏置場景早。
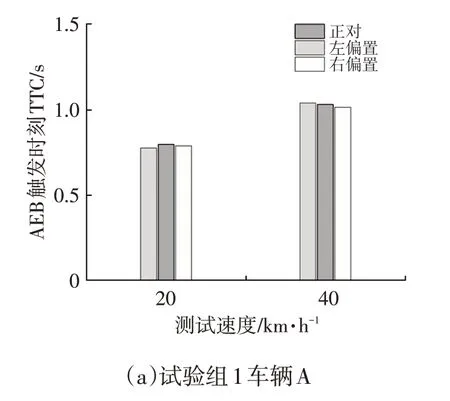
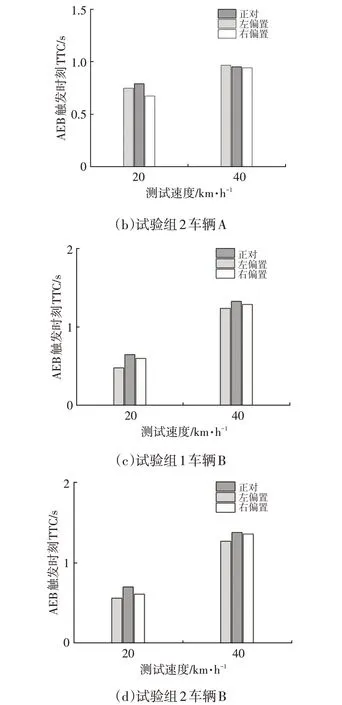
圖2 車輛A、B自動緊急制動功能碰撞點偏置測試結果
兩車FCW 功能的表現如圖3 所示。試驗中FCW功能設置為中靈敏度,測試車速分別為40 km/h 和70 km/h。試驗結果表明,兩車在正對場景中FCW 功能的觸發時機較早,即FCW 功能在碰撞點有一定偏置的場景下,較正對場景更晚發出警示。
此外,車輛A 在偏置的場景中,AEB 系統存在漏識別的情況,漏識別率為20%。
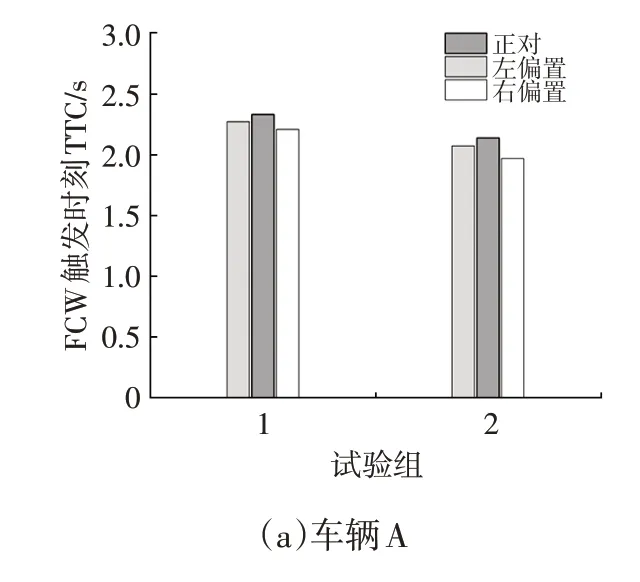
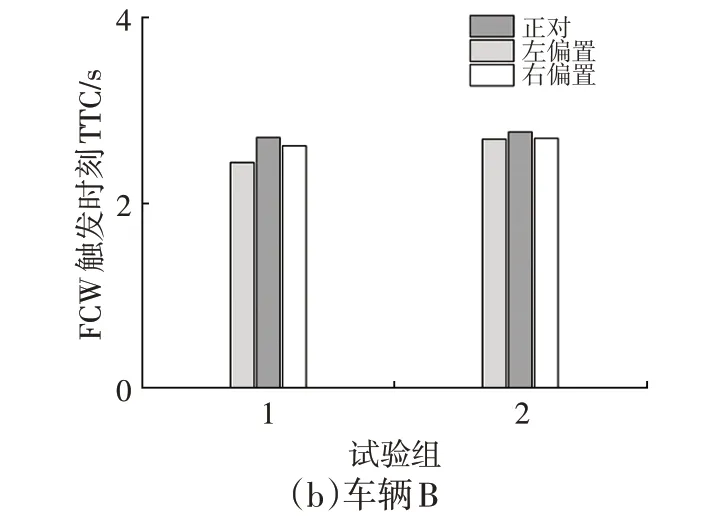
圖3 車輛A、B前向碰撞預警功能撞點偏置測試結果
綜上所述,相較正對場景,偏置場景下車輛A 的FCW功能報警較晚,且系統存在漏識別情況;偏置場景下車輛B的AEB功能觸發和FCW功能報警均較晚。
因此,設置碰撞點偏置的測試場景,可以更好地檢驗AEB系統的性能表現和目標識別能力。
為避免相鄰車道誤作用的情況發生,AEB系統對偏置目標的識別和碰撞危險計算通常設有“門限值”,即當目標橫向偏置超過一定距離,系統會抑制功能觸發。因此設計場景時,碰撞點的橫向偏置距離應在AEB 系統對偏置目標識別的“門限值”范圍內。
4.2 夜間測試
夜間測試是在對光照條件有一定要求的夜間路段,車輛開啟近光燈或遠光燈時進行的測試。夜間場景的能見度和光線條件比白天差,因此攝像頭類型的傳感器的目標識別能力會受到一定影響。
本文設置了白天和夜間的對比試驗,夜間測試路段的光源為兩側對稱型,光照強度在8~22 lx 范圍內。車輛A 進行CCRs 試驗,車輛B 進行前方自行車追尾場景(Car-to-Pedestrian Longitudinal Adult,CPLA)試驗。
車輛A AEB 功能的表現如圖4 所示。白天場景中的AEB功能觸發時機和開始制動距離較夜間場景更早。
車輛A FCW功能的表現如圖5所示。測試中FCW功能的靈敏度設置為高、低兩擋。與AEB 功能的表現類似,夜間場景下FCW功能的報警時刻普遍較晚,且在測試車速40 km/h、靈敏度低時,與白天場景表現有很大差異。
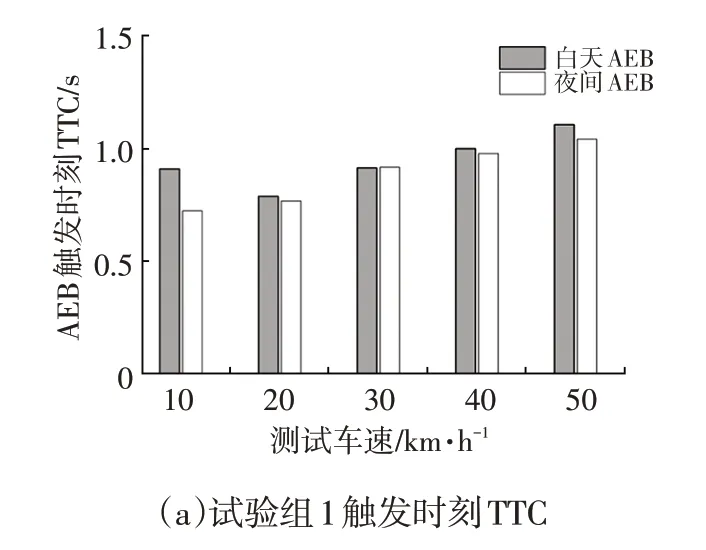
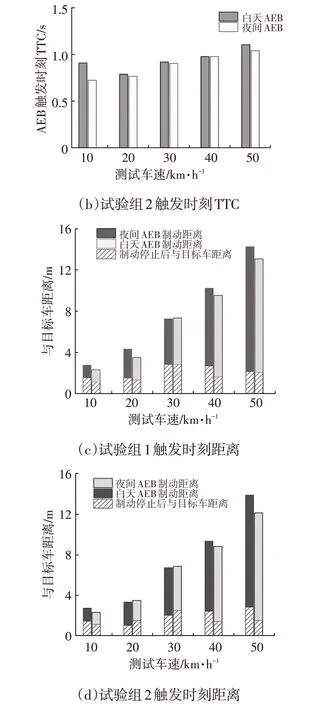
圖4 車輛A自動緊急制動功能夜間測試
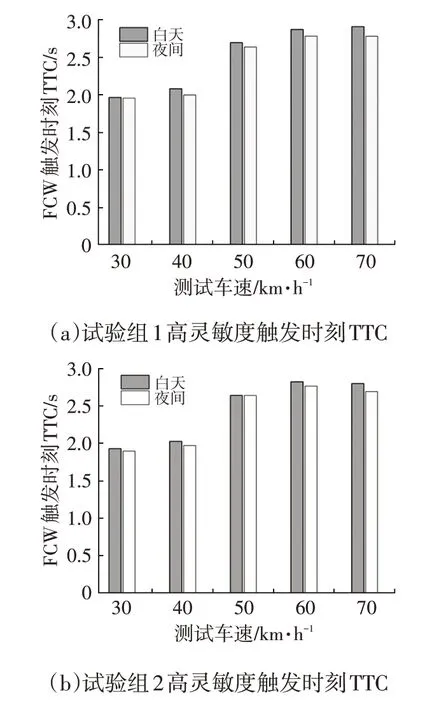
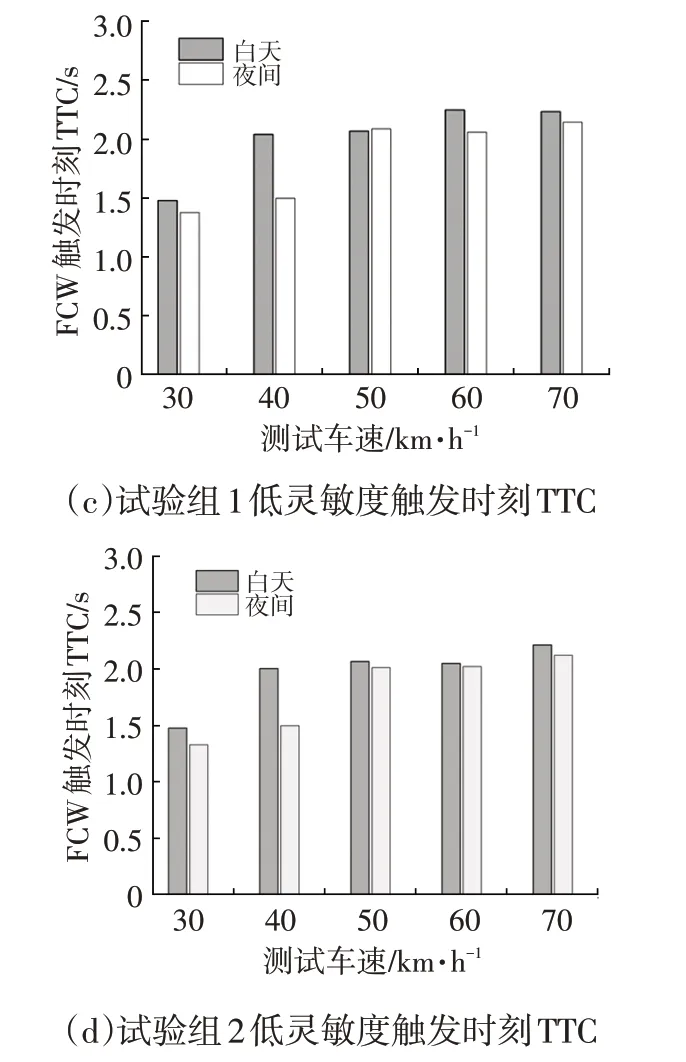
圖5 車輛A前向碰撞預警功能夜間測試結果
夜間場景中,車輛A 的AEB 系統存在漏識別情況,夜間CCRs 測試有13%的漏識別率,而白天場景未出現漏識別。
車輛B AEB 功能的表現如圖6 所示。白天場景中的AEB功能觸發時機較夜間場景早。并且在夜間高速場景下,由于攝像頭在夜間的探測距離有限,激活時刻明顯較晚。
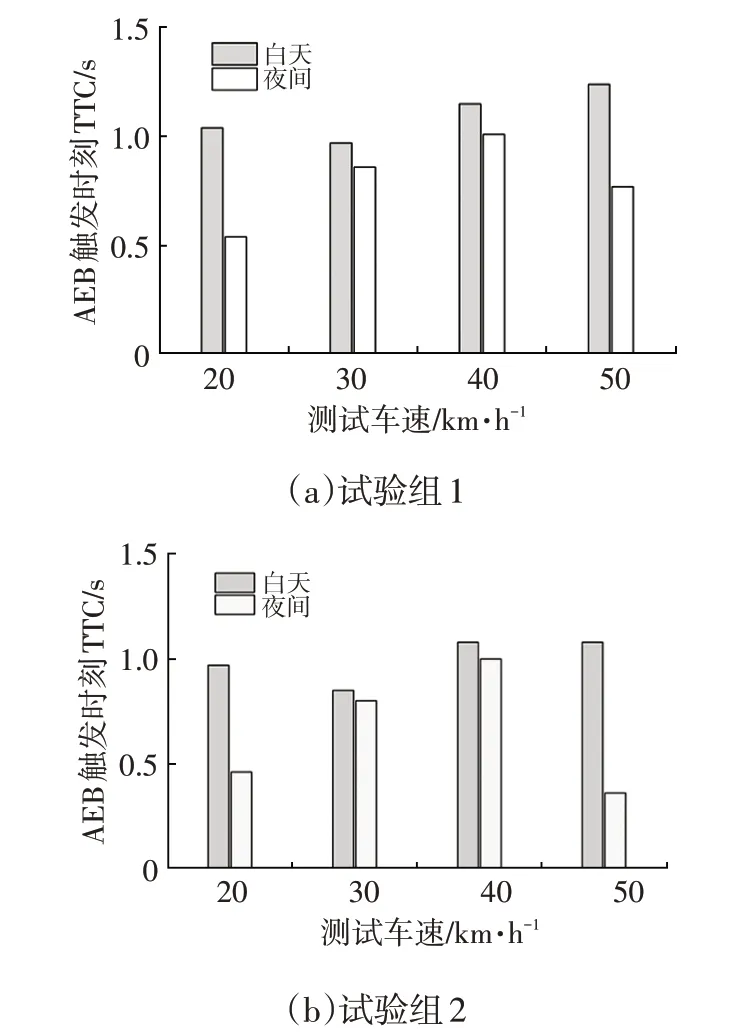
圖6 車輛B自動緊急制動功能夜間測試結果
車B FCW 功能的表現如圖7 所示,FCW 功能的靈敏度設置為中檔。白天場景中的FCW功能觸發時機較夜間早,并且由于攝像頭在夜間的探測距離有限,夜間高速的場景中,FCW 功能的觸發距離遠小于對應的白天場景中的觸發距離。
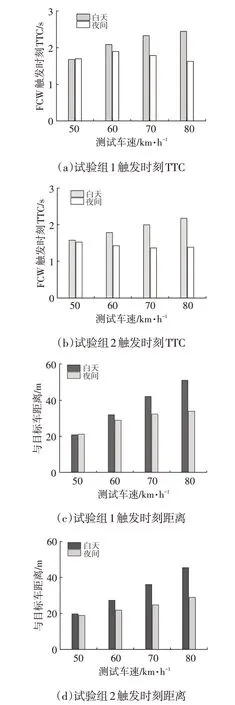
圖7 車輛B前向碰撞預警功能夜間測試結果
綜上所述,相較白天場景,夜間場景下兩車的AEB功能觸發和FCW 功能報警均較晚,且車輛A 系統存在漏識別情況,車輛B系統在夜間高速場景下系統各功能觸發時刻TTC明顯變小。
因此,增加夜間測試場景可以更好地檢驗系統的探測距離、目標識別能力和預警、制動功能觸發時機。
在設計夜間場景的測試時,應保證試驗過程中光照條件一致,并且測試車輛的遠、近光燈狀態應有明確要求,以保證測試場景的一致性。
4.3 兒童、自行車目標測試
道路交通傷害已成為我國0~17歲兒童及青少年傷害致死的第二大原因[5],為保護兒童在行走時的交通安全,對AEB 系統增加兒童目標的測試內容具有重大意義。AEB VRU測試用目標如圖8所示。
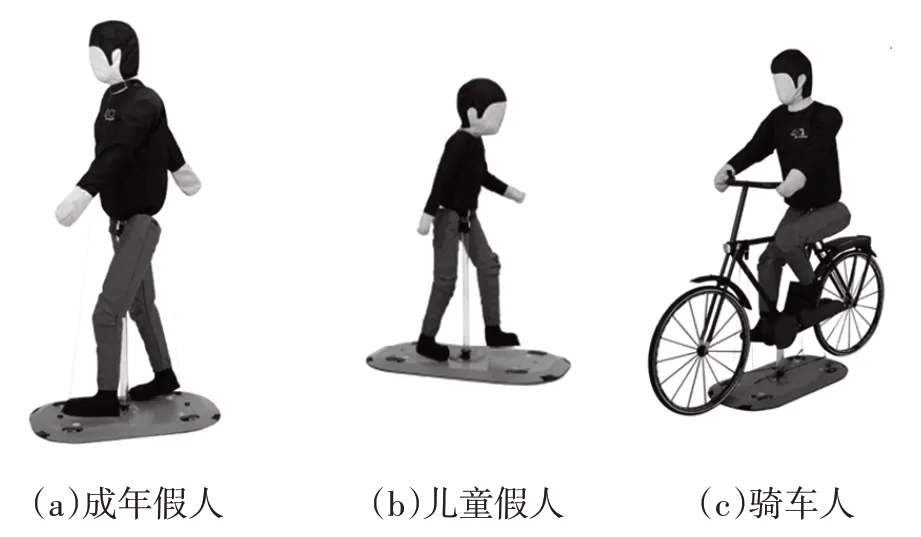
圖8 AEB VRU測試用目標
兒童目標相比成年人目標體型矮小,受駕駛時視野高度的限制,不易被駕駛員及時發現。這個特點同樣會對雷達、攝像頭等傳感器的識別功能產生影響,容易出現漏識別的情況。
本文分別使用兒童、成人兩種目標對車輛A的AEB系統進行測試,車輛A的AEB功能表現如圖9所示。在正確識別到目標的情況下,該AEB 系統對兒童目標觸發制動的時機與對成年目標的觸發時機大致相同。
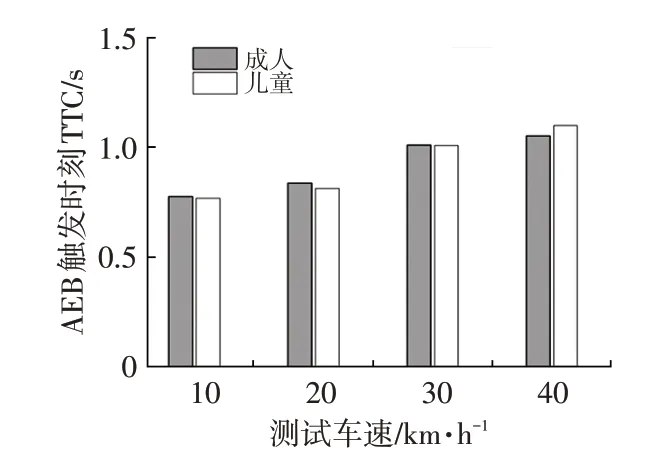
圖9 車輛A兒童、成年目標制動緊急制動測試結果
車輛A系統對于兒童目標存在漏識別現象,在6次試驗中,2 次試驗未采取制動。而成年目標在4 次試驗中均被識別并完成減速制動。
2011~2016年非機動車道的交通事故年均增長3.3%,自行車事故時有發生[6]。自行車目標移動速度快,相比于行人目標,在橫穿道路時進入攝像頭視野較晚,會對攝像頭傳感器的識別造成影響,容易出現漏識別的情況。
本文使用自行車目標物,對車輛B的AEB系統進行自行車橫穿場景的靜態和動態(自行車目標物橫穿速度為15 km/h)測試,動態場景的測試車速為30~60 km/h。
自行車在道路中央橫向靜止時,車輛B能正確識別到目標,并減速制動完成避撞;自行車從一端進行橫穿時,車B均未能識別到目標。
綜上所述,AEB系統對不同目標的識別能力具有較大差異,可以通過增加識別兒童目標或自行車目標的功能測試,對系統能否準確識別目標進行驗證。
4.4 彎道測試
由于傳感器的探測角度會限制系統對彎道中目標的識別,彎道的曲率半徑會影響系統對兩車間距的計算,彎道中車輛制動特性與直道不同等因素的影響,彎道場景的AEB 系統表現會與直道存在差異[7]。彎道測試的場景如圖10所示。

圖10 彎道測試示意
本文在曲率半徑約500 m 的彎道,對車輛A 進行AEB CCRs試驗,車輛A AEB功能表現如圖11所示。由于AEB 系統傳感器設定有一定的探測角度,且系統計算判定的碰撞幾率和碰撞時間(Time To Collision,TTC)受彎道路況的影響,在部分彎道場景中,系統的響應時機與直道存在明顯差異,且在低速(10~30 km/h)工況下兩場景的差異較大。這表明在彎道場景中,該系統表現不穩定,且會出現過早制動的現象。
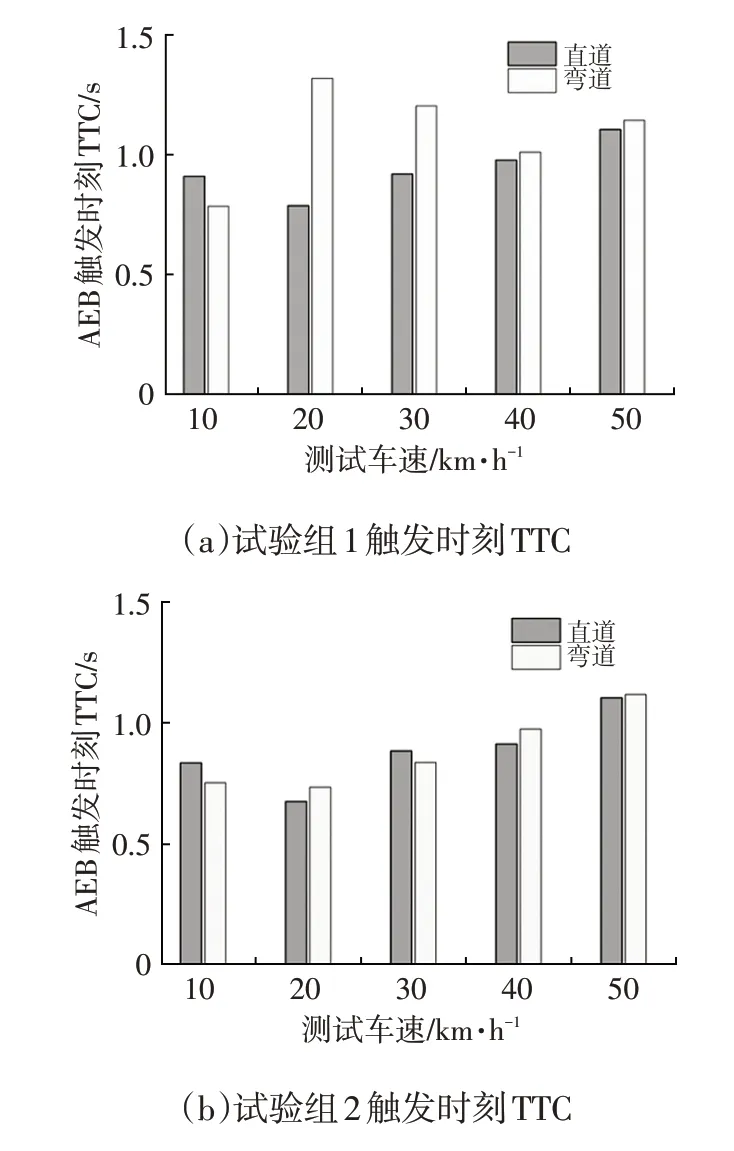
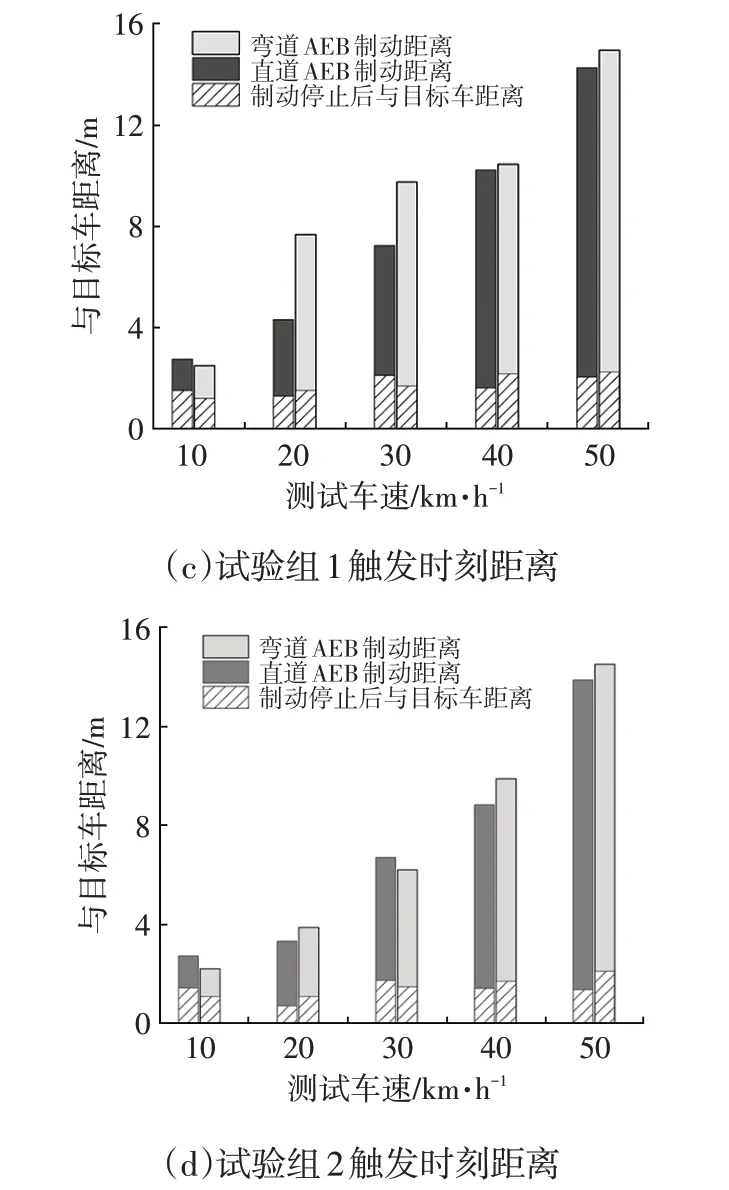
圖11 車輛A自動緊急制動功能彎道測試結果
車輛A 彎道測試2 次試驗結果對比如圖12 所示。車輛的AEB功能在2次測試中表現差距較大,測試車速20 km/h 的試驗組TTC 甚至相差0.5 s 以上。該AEB 系統識別到目標,并發出制動指令的時機不穩定。
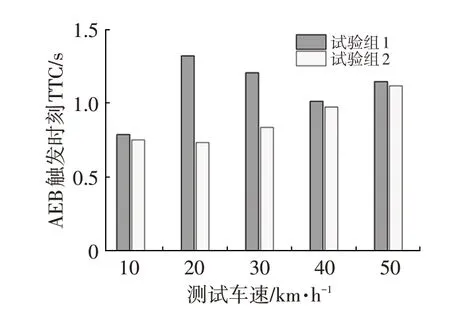
圖12 彎道測試2組試驗結果對比
彎道場景中,AEB 功能的制動效果也與直道不同,如表3所示。從表3可以看出,彎道中車輛受AEB系統控制產生的最大減速度均高于直道同工況的減速度。這一方面是由于彎道中車輛的制動力會分解在縱向和側向2 個方向,同等條件下,彎道內車輛需要更大的制動力來完成減速制動;另一方面,由于2 個場景中AEB功能響應時刻的TTC不同,AEB系統發出的減速度也會不同。
綜上所述,彎道場景中車輛A AEB 功能的觸發時機不穩定,會出現過早制動的現象,且彎道中車輛需要的制動減速度更大。因此,增加彎道測試場景,可以更好地檢驗系統的觸發時機和制動能力。
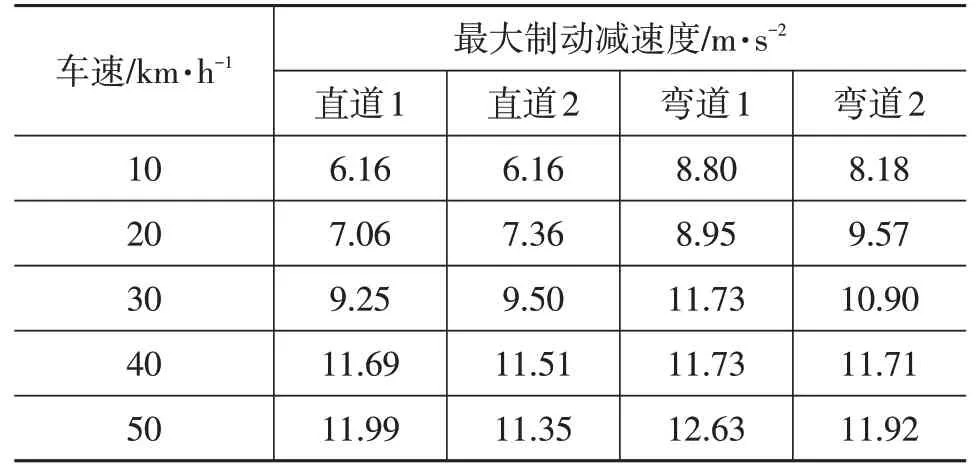
表3 最大制動減速度對比
在設計彎道測試場景時,應確定各場景所使用的彎道的曲率半徑一致且合理,對測試車輛的行駛軌跡也應有統一要求,保證試驗的一致性。
5 評價方法的研究
現行的AEB 系統評價規程中,評價參數多為車輛是否避撞和碰撞時的相對速度。根據車輛的避撞表現,每組試驗會獲得相應分數,最終根據各組試驗權重計算出AEB系統的總得分。
這樣的評價方式評價參數單一,難以全面的評價AEB系統的性能表現。加入其他評價參數,如系統響應時刻的TTC、制動減速度峰值、制動距離、制動策略等,可以使評價更全面、豐富。
5.1 碰撞時間
《C-NCAP 管理規則(2018年版)》對于AEB和FCW功能觸發時刻的TTC還沒有明確的評價方法,只是要求FCW功能的觸發時刻TTC應小于4 s。
本文以FCW 功能為例,從數據庫中隨機抽取90 組試驗結果(CCRs、CCRb、CCRm場景的比例為4∶3∶2),對觸發時刻TTC的統計結果如表4所示。

表4 前碰撞預警功能報警時刻TTC統計結果
抽取的試驗結果中,碰撞時間大于4 s 的試驗有2組,可以看出大部分試驗結果均滿足目前評價規范的得分要求,但是FCW的觸發時機分布并不均勻,報警時刻較早(3~4 s)和較晚(1.2~2 s)的試驗結果也占有很大比例。要進一步評價FCW 功能的觸發時機,就需要細化評價的等級。
為了分析不同測試車速下FCW報警時刻TTC的分布規律,本文以CCRs場景為例,抽取每個測試車速下的5組有效數據進行分析,結果如圖13所示。
由圖13可以看出,隨著車速的增加,報警時刻TTC呈逐漸增大的趨勢。文獻[8]的研究也表明,與FCW 功能相類似,AEB功能的制動時刻TTC也應隨著車速的增加呈增大趨勢。
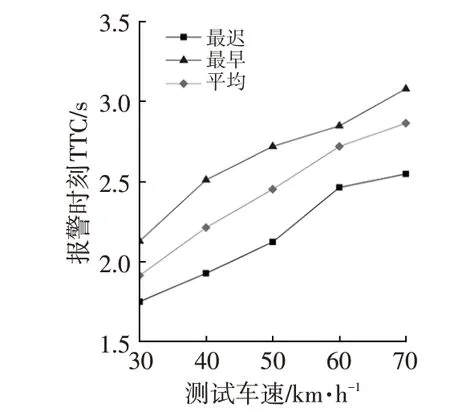
圖13 不同車速報警時刻TTC
當車輛處于高速行駛狀態,較大的報警時刻TTC可以保證駕駛員有充足的時間進行減速制動,但若車輛行駛速度較低,則會影響駕駛員的駕駛體驗。因此,若將報警時刻TTC作為評價參數,可采用根據測試車速分級設定評價參數的評價方法。
5.2 制動減速度峰值
制動減速度峰值是評價制動時駕駛員駕駛體驗的重要參數,主要可應用于AEB功能的評價方法。由于AEB功能觸發時兩車往往有緊急的碰撞危機,因此系統采取的制動減速度往往較大。根據測試車速不同,制動減速度峰值大多在6~14 m/s2的范圍內,這與AEB功能的觸發時機、系統發出的減速度、實際制動效果均有關系。
本文以CCRs 場景為例,從數據庫中隨機抽取每個車速下5組有效數據進行分析,結果如圖14所示。
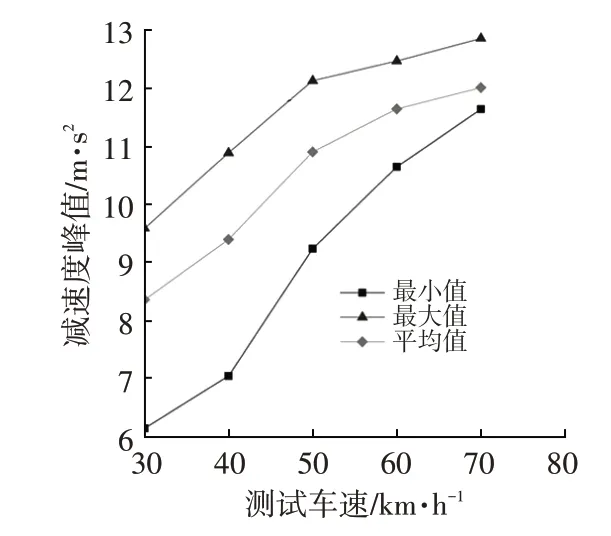
圖14 不同車速下的減速度峰值
由圖14可以看出,隨著車速的增加,報警時刻TTC呈逐漸增大的趨勢。當車輛處于高速運動狀態,需要更高的減速度來降低碰撞速度或避撞;當車輛處于低速時,在保證系統可以完成減速避撞的前提下,較低的減速度峰值可以帶來更舒適的駕駛體驗。若將制動減速度峰值作為評價參數,同樣可采用根據測試車速分級設定評價參數的評價方法。
5.3 制動停止后距離
制動停止后距離是指車輛在完成減速避撞后與目標的縱向相對距離。若制動停止后距離較大,則AEB功能的觸發時機過早或系統發出的減速度命令過大,這都會影響駕駛員的駕駛體驗。因此,制動停止后距離可用于AEB功能的觸發時機和制動效果的綜合評價。
本文從數據庫中隨機抽取120 組試驗結果(CCRs、CCRb、CCRm、VRU 場景的比例為4∶3∶2∶3),對制動停止后距離的統計結果如表5所示。

表5 制動停止后距離統計結果
統計結果顯示,120 組試驗中,制動停止后距離較遠(2~3 m)的占30.4%,距離過遠(>3 m)的占13.6%。這表明AEB功能在很多場景下存在觸發時機過早或系統發出的減速度命令過大的問題。因此,將制動停止后距離作為AEB系統的評價參數很有必要。
6 結束語
通過分析現有的測試評價規程并結合實車測試結果,本文從測試場景和評價參數兩方面探究了AEB 系統的測試評價方法,并提出了優化建議。測試場景方面,增加碰撞點偏置測試、夜間測試、兒童目標測試、自行車目標測試、彎道測試可以更好地測試AEB 系統識別目標的能力和系統響應的時機;評價參數方面,碰撞時間、制動減速度峰值、制動停止后距離可以更全面地評價AEB系統的表現。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
