淺析一種姿態系統的實現方法
2020-05-26 02:18:11蘇瑞鄧宇孫瑜
科學與信息化 2020年8期
蘇瑞 鄧宇 孫瑜


摘 要 本文給出了一種小型姿態系統的實現方法,介紹了該系統的硬件框圖及數據解算。該系統基于MEMS器件搭建,采用模塊設計,可實現小機動情況下的高精度姿態測量。最后給出機載試驗的驗證結果。
關鍵詞 姿態系統;傳感器
引言
在小型飛行器中,由于其本身的體積和重量都很小,要求飛行器導航系統上應用的運動測量設備既要保證一定的精度,又能盡量減小導航設備的體積和重量。傳統的機械轉子陀螺結構復雜,易磨損、壽命短,激光陀螺和光纖陀螺性能穩定、可靠性高,但其高昂的價格限制其在某些場合的應用。相比之下,基于微電子機械系統(MEMS)器件而搭建的慣性系統具有體積小、功耗低、質量輕、響應快、靈敏度高、成本低等優點,加以濾波和算法修正,可以達到在小型飛行器上的應用要求。
1系統概述
本姿態系統采用基于MEMS三軸陀螺儀和三軸加速度計構建的慣性系統,通過內置高性能處理器,采用捷聯慣性姿態算法實現靜態和動態角度測量。其中三軸加速度用于跟蹤靜態角度解算,三軸陀螺用于跟蹤動態角度解算。可以測量的姿態參數包括全姿態橫滾角、俯仰角、角速度和加速度等8路信號,通過RS232格式信號編碼輸出,并可通過D/A轉換器以模擬信號形式輸出各路信號,輸出信號與角度/角速度/加速度呈線性關系。系統組成框圖如圖1。
2工作原理
本姿態系統采用模塊化設計,包括電源模塊、數字式慣性系統(包含IMU信息處理模塊和捷聯航姿解算模塊)、DA輸出模塊、殼體和接插件等功能單元。
2.1 電源模塊
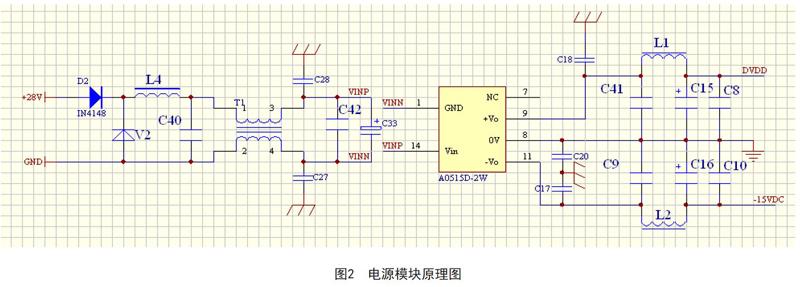
電源模塊用于將機載28V電源轉換為信號處理電路和數字式慣性系統所需的15V供電,主要包括極性保護及干擾濾波兩部分,電路原理如圖2所示。極性保護電路采用二極管極性保護電路D2,選用1N4148型開關二極管。電磁干擾濾波電路選用有關廠家推薦的典型參數。
2.2 數字式慣性系統
數字式慣性系統通過內置高精度6自由度慣性測量單元IMU實現載體的三軸向角速率和加速度測量。其中三軸向陀螺用以敏感載體運動角速度,經信號預處理后,提供載體姿態計算原始信息,最終通過姿態四元數算法計算載體姿態信息。由于陀螺精度較低,漂移較大,長時間工作不能保證測量精度。利用三軸向加速度計測量重力在載體三軸向上的分量,可以計算出載體相對于當地地理水平面的傾角。由于加速度計測量精度較高,其角度解算精度也很高,因此可利用加速度計輸出作為觀測量,采用卡爾曼濾波器構造一個可變增益的閉環反饋系統,來修正因陀螺漂移造成的姿態誤差,從而實現動靜態運動條件下載體姿態的高精度測量。工作原理如圖3所示。
2.3 D/A輸出模塊
D/A輸出模塊包括D/A轉換部分和信號放大、濾波部分。其中D/A轉換采用專用四通道轉換芯片AD5324,該芯片為12位單極性信號輸出,輸出信號范圍為0V~Vref。
為了提高放大電路的精度、方便調零和濾波電路的設計,放大電路采用了兩級放大,采用美國AD公司的OP297芯片。該芯片內部集成兩個運算放大器,具有低輸入偏置電壓、高開環增益、低噪聲密度等突出特點。第一級為減法電路,由RefF02Bu及電阻網絡產生約0.94V基準電壓Vref,反向放大2倍后與D/A輸出電壓值疊加,輸出-1.875V~1.875V電壓信號。第二級為反向放大、濾波電路,通過電阻網絡設定其增益為-2、通帶截止頻率為10Hz,從而把上級輸出放大成穩定的-3.75V~+3.75VDC雙極性標準電壓信號。原理圖如圖4所示。
2.4 軟件解碼算法
數字式慣性系統的輸出為RS232信號格式的數據包,需對其解碼運算后再送入D/A轉換模塊。
數據包為37字節的十六進制數,格式如圖5所示。依次為通信協議起始字符(數據包頭)、橫滾角、俯仰角、偏航角、三軸向角速率、三軸向加速度、溫度、時間、狀態信息和CRC校驗碼。此處提取橫滾角、俯仰角、三軸向角速率和三軸向加速度共8路信號進行標度轉換,轉換為輸出電壓信號。
以橫滾角為例,解算公式為:
橫滾角=接收數據/(65536/量程)=接收數據*量程/65536? ? ? ? ?(1)
輸出電壓=橫滾角*(電壓量程/角度量程)? ? ? ? ? ? ? ? ? ? ?(2)
由于采集數據為實數,編碼時采用補碼,首先要對補碼進行范圍轉換,再根據實際應用的量程對數據范圍進行截取限定。按照公式1、公式2進行解算和標度轉換后,進行CRC校驗,如無誤碼,則輸出轉換的電壓,出現誤碼則丟棄該數據包,重新接收。
3試驗驗證
該姿態系統經兩次機載試驗,與機載地平儀的輸出信號進行比對。
試驗中平飛、懸停、機動產品輸出正常,動態跟隨性好,但在連續大機動、加速-平飛-懸停段,產品輸出發散,誤差大。因此該系統僅能應用在小機動條件下。數據如圖6、圖7所示。
4結束語
由試驗結果可知,該系統質量輕、響應快、靈敏度高,可滿足小機動條件下的小型飛行器的姿態測量。該小型姿態系統目前已裝機使用。
參考文獻
[1] 張謙,裴海龍,羅沛.基于MEMS器件的姿態航向參考系統設計及應用.2007,28(3):631-634.
[2] 黃旭,王常虹.基于微機械慣性器件和磁強計的姿態航向系統.2005,24(8)54-56.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45