8.8 m大采高綜采回風巷支架組電控系統設計
2020-06-02 05:46:36宋濤
煤礦機電 2020年2期
關鍵詞:支架
宋濤
(1.中國煤炭科工集團 太原研究院有限公司, 山西 太原 030006;2.山西天地煤機裝備有限公司, 山西 太原 030006)
0 引言
我國陜蒙地區賦存大量厚度6~8 m、埋層較淺煤質堅硬的厚煤層,這類煤層更適宜采用一次采全高開采方法。為提高回采率,神東煤炭集團公司大柳塔煤礦建立8.8 m綜采工作面,但現有的機械化超前支護設備不能適應特大采高工作面的超高、超大工作壓力的超前支護要求,故研制開發8.8 m大采高綜采回風巷支架組勢在必行。8.8 m工作面自動化超前自移支架針對大采高工作面要求進行設計[1-3],通過機、電、液控制實現自動化控制,隨著開采高度提升,工作阻力和支架質量也相應增加,電液控制系統對自動化的要求更高,如何將兩順槽超前支架的控制系統融入整個工作面的自動化智能平臺,實現監控、報警、數據共享及4G信號傳輸的自動化控制系統,成為未來煤礦發展研究的重點。
1 總體結構及組成形式
1.1 總體結構
針對大柳塔煤礦太原煤科院設計了8.8 m大采高回風巷支架組及電液控制系統。該支架組(圖1)由四架組成,分列于巷道兩側,兩種支架結構大致相同,左右兩架支架的頂梁、底座之間都連接有防倒調架油缸, 互為扶持防倒,滿足巷道行車要求。巷道單側兩架支架之間的推移油缸完全伸出后的超前支護長度為25 m,兩架支架之間的推移油缸完全收回后的超前支護長度為24 m。當一架支架前移時,其余三架對巷道頂板進行有效支護,從而減少了移架時巷道的空頂面積。
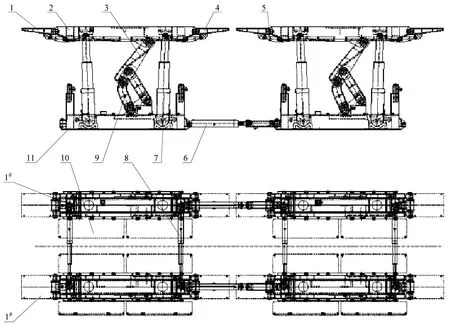
1-前梁;2-頂梁;3-掩護梁;4-后梁;5-短柱;6-推移機構;7-立柱;8-防倒油缸;9-前后連桿;10-側翻梁;11-底座。
1.2 支架組組成及參數
支架組由主頂梁、前梁、后梁、一二級側翻梁、四連桿機構、底座等結構件組成,油缸包括立柱、短柱、側翻梁千斤頂、推移千斤頂、放倒油缸組成。
支架組主要技術參數為:
支架型式
兩柱支撐掩護式
支架高度/mm
3 000~5 600 mm
工作阻力/(kN/組)
83 100
支架寬度/mm
5 550
支護強度/MPa
0.64(P=46 MPa)
頂梁比壓/MPa
2.56(P=46 MPa)
底座比壓/MPa
2.54(P=46 MPa)
控制方式
電液控制/遙控控制
2 支架組主要特點
1) 前后支架組底座間的推移機構由推移千斤頂和推移桿組成,且支架間的兩根推移千斤頂單獨控制,推移千斤頂和防倒調架千斤頂配合使用,靈活控制支架組前進方向。
2) 超前支架頂梁內側設計側翻梁,外側預留側翻梁連接位置,頂梁側配置二級側翻梁(以滿足超寬巷道使用),正幫側設計固定可拆卸擋矸板。
3) 底座腔體內設計調底千斤頂,通過調底千斤頂調整支架行走位置,保證支架姿態。
4) 四架支架部件相同,安裝維護方便,減少備件,同時根據實際支護情況需求,在原支架組基礎上直接增加支架,達到更長距離的超前支護要求。
3 支架組控制系統
3.1 總體概述
超前支架組組由4架組成,采用4個控制器連在一起,共用一個電源,使用一個自動反沖洗過濾器,自動反沖洗過濾器放在1#架。
支架組采用本架/鄰架電控/無線遙控電液控制方式,采用電液控制系統[4]。電液換向閥和支架控制器均安裝于本架內,各架可被其他支架鄰架或者隔架操作,也可實現本架電磁閥按鈕的手動操作,操作靈活、安全可靠。
3.2 電液控制原理與功能
1#架:共計18功能(前立柱升降、后立柱升降、1#架與3#架間推移千斤頂伸縮、前短柱伸縮、后短柱伸縮、左側翻梁千斤頂伸縮、右側翻梁千斤頂伸縮、前挑梁伸縮、底調千斤頂伸縮),采用1個20功能電液換向閥,1個支架控制器實現電控動作;1#架可被其他支架鄰架或者隔架操作,也可實現本架電磁閥按鈕的手動操作。
2#架:共計20功能(前立柱升降、后立柱升降、2#架與4#架間推移千斤頂伸縮、前短柱伸縮、后短柱伸縮、側翻梁千斤頂伸縮、前挑梁伸縮、頂梁防倒千斤頂1伸縮、頂梁防倒千斤頂2伸縮、底調千斤頂伸縮),2#架可被其他支架鄰架或者隔架操作,也可實現本架電磁閥按鈕的手動操作。
3#架:共計16功能(前立柱升、前立柱降、后立柱升、后立柱降、前短柱伸、前短柱縮、后短柱伸、后短柱縮、左側翻梁千斤頂伸、左側翻梁千斤頂縮、右側翻梁千斤頂伸、右側翻梁千斤頂縮、前挑梁伸、前挑梁縮、底座防倒千斤頂縮、底調千斤頂伸、底調千斤頂縮),3#架可被其他支架鄰架或者隔架操作,也可實現本架電磁閥按鈕的手動操作。
4#架:共計16功能(前立柱升降、后立柱升降、前短柱伸縮、后短柱伸縮、側翻梁千斤頂伸縮、前挑梁伸縮、頂梁防倒千斤頂1伸縮、頂梁防倒千斤頂2伸縮、底調千斤頂伸縮),4#架可被其他支架鄰架或者隔架操作,實現本架電磁閥按鈕手動操作。
支架立柱設計配置3種安全閥,分別為1 000 L、1 000 L充氮安全閥、250 L安全閥(40 MPa),其中在1 000 L充氮安全閥出廠時,調定壓力46 MPa(對應支架組工作阻力81 100 kN,支護強度0.63 MPa),同時設置立柱進液1 000 L安全閥保障立柱進液壓力,更好地控制支架對頂板的實際支護阻力。
4 電液控制系統基本配置
大采高支架電液控制系統方案[6-7]主要解決8 m以上液壓支架工作面的控制問題,即通過對支架姿態有效的控制,加強護幫板對煤壁支護,精確控制立柱降柱,防止煤機干涉,以解決超大采高工作面出現的問題。主要功能為:
測量立柱壓力,測量推移行程,視頻攝像頭,支架高度姿態測量,平衡油缸壓力測量,智能立柱高效支撐頂板,巷道礦壓監測建立周期來壓數學模型。
電液控制系統配置見圖2,系統包含以太網控制器、聲光報警燈、采高傳感器、井下攝像頭、液壓主閥等,上位機和供電系統通過對超前支架組就地和遠程控制,實現可視化、可控化[4-5]。
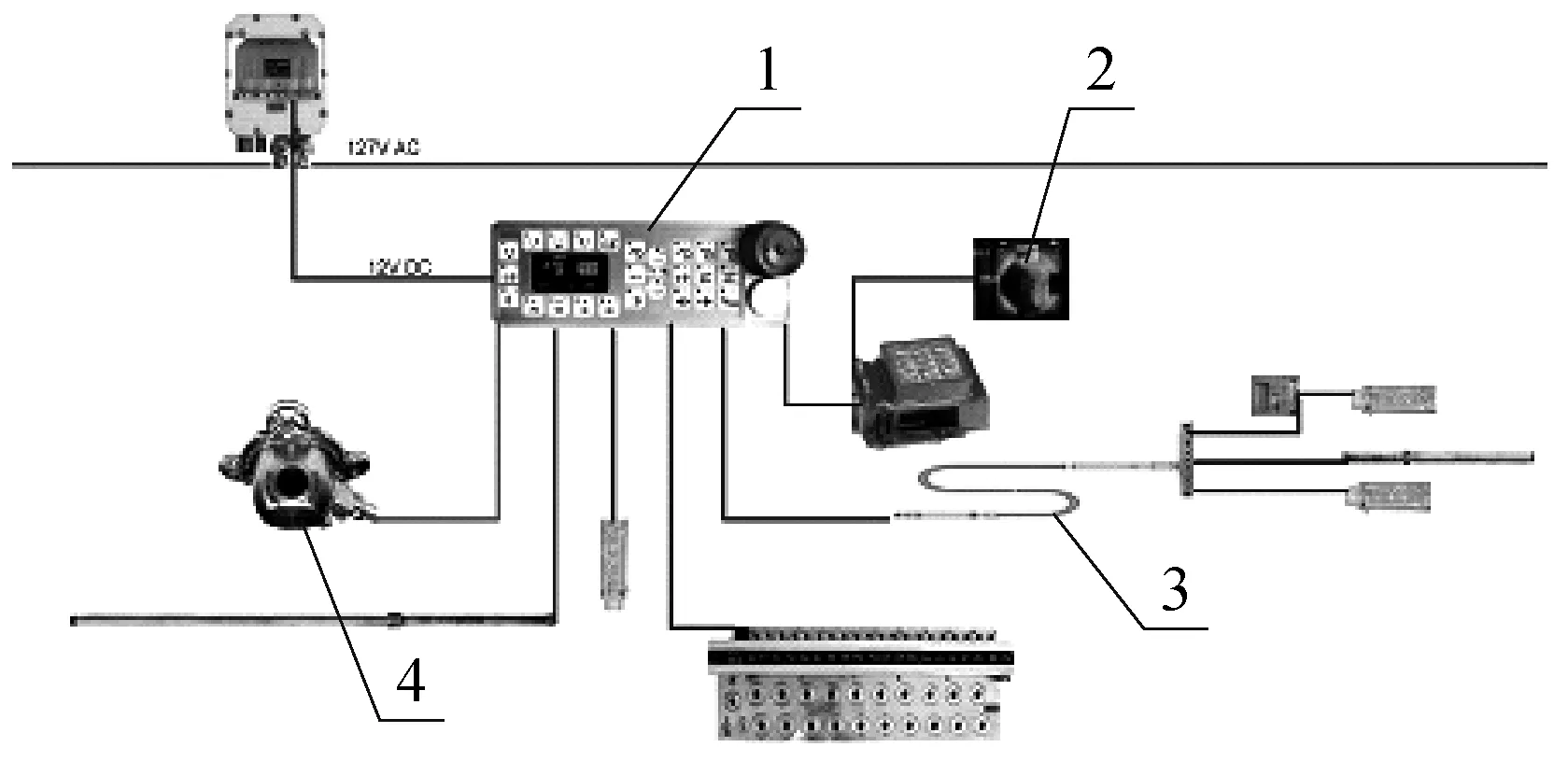
1-以太網控制器;2-外置聲光報警燈;3-采高傳感器;4-井下攝像頭。
1) 以太網控制器。每架安裝1個控制器,安裝在底座上四連桿之前,控制器由安裝架進行防護。控制器通過人機界面接受操作人員控制指令,執行目標支架所選定的液壓動作,或接收傳感器所測量到的數據,比對相應設定值,依據控制器內部應用程序發出控制指令,執行目標支架相應的液壓動作,控制器采用以太網通訊協議,數據傳輸速率為100 Mbit/s。以太網控制器作為數據傳輸和控制平臺,實現設備數據傳輸,支架控制,視頻傳輸,環境監測,人員識別,語音傳輸和智能照明七網合一。
2) 采高傳感器。每架安裝1個采高傳感器。采高傳感器一端安裝在頂梁上,一端和控制器相連。采高傳感器測量液壓支架絕對高度,可以測量煤壁高度,采高傳感器依據重力原理確定測量基準,精確測量工作面高度,誤差小于2 cm,集成傾角測量功能,測量支架頂梁姿態,且與控制器內安裝的傾角傳感器相配合,以確定液壓支架三維姿態。
3) 井下攝像頭。井下攝像頭,結構緊湊,云臺設計,330°旋轉,紅外補光,彩色圖片,720p高清圖像自動清潔設計,通過控制器傳輸視頻圖像。
4) 外置聲光報警燈。報警燈依據工作面液壓支架控制器狀態,通過顏色變化和警示聲音顯示液壓支架實時狀態,在工作面內劃分安全和危險區域。
5 應用效果分析
1) 支架組采用了電液控制,其系統具有遙控操作功能。當遙控功能發生故障時,仍能夠采取傳統電控的操作方式,避免影響正常生產。
2) 可知該電控系統對支架組立柱的工作壓力、推移油缸的行程、頂板的位置、方向等進行監測和數據傳輸,能將數據傳輸至地面控制中心并顯示,對立柱的工作壓力按循環生成相應的圖表可供查詢。
3) 該控制系統與神東綜合自動化系統實現雙向通信,便于神東在將來實現自動化遠程控制。
6 結論
針對大柳塔煤礦開發了8.8 m工作面自動化超前支架組研制成功,通過機、電、液控制實現自動化控制,將兩順槽超前支架的控制系統融入整個工作面的自動化智能平臺,實現監控、報警、數據共享的功能,現場使用效果良好,同時為未來智能化煤礦發展奠定了一定的基礎。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
