耙吸式挖泥船電網無功補償裝置控制研究*
2020-06-03 08:13:18楊二中朱漢華徐合力
武漢理工大學學報(交通科學與工程版) 2020年2期
楊二中 朱漢華 徐合力
(武漢理工大學能源與動力學院 武漢 430063)
0 引 言
船舶交流電力系統中,電網的大多數負載設備都是感性的,當同步發電機輸出滯后電流時,電樞磁勢除了一部分產生交軸電樞反應外,還有一部分產生直軸去磁電樞反應,這樣會造成發電機組輸出端電壓的下降,同時導致電網功率因數降低[1].文獻[2]指出其曾經工作的一艘船舶因功率因數過低導致發電機過載造成全船失電的事故發生.在船舶實際負載工作的狀態下,無功功率又是無法避免的,所以在電網中用無功補償方式來提高船舶電網功率因數十分有必要.
無功補償設備主要有TSC(晶閘管投切電容器)、TCR(晶閘管控制電抗器)、TSR(晶閘管投切電抗器)、SVG(靜止無功發生器)[3-4],其中TSC只能補償容性無功,TCR和TSR只能補償感性無功,TSC和TSR是有級調節,TCR和SVG可以實現連續調節,但是TCR工作過程中會產生大量諧波污染電網.SVG可以補償容性無功和感性無功,并且可以連續調節,但SVG存在成本較高,控制系統比較復雜的,并且技術并未完全成熟[5].此外,文獻[6]提出將有限控制集模型預測控制應用于混合有源電力濾波器用于動態無功補償.文獻[7]介紹了一種用于智能電網系統動態無功補償的晶閘管控制LC補償器.但船舶電網作為孤立的電網系統,具有容量小,工況復雜多變等特點.目前并沒有專門用于船舶電網進行無功補償的專用設備.目前船舶所用無功補償設備多為陸船通用,不能達到船舶預期效果[8].
目前比較常用的混合無功補償裝置是TSC+TCR,但是TCR工作時會產生大量的諧波[9].本文采用TSC+TSR的混合無功補償裝置對散貨船電網進行無功補償,以功率因數和無功功率值為控制目標參數.由于TSC和TSR工作過程中晶閘管只起到開關作用,所以該混合無功補償裝置工作過程中理論上是不產生諧波的.
1 船舶電網無功補償原理
三相電路瞬時無功功率理論突破了傳統的以平均值為基礎的功率定義,系統的定義了瞬時無功功率和瞬時有功功率量等瞬時功率量[10].傳統理論中的有功功率、無功功率都是在瞬時值和平均值的基礎上定義的,它們只適用于電壓、電流均為正弦波時的情況.而瞬時無功功率理論中的概念都是在瞬時值的基礎上定義的,它不僅適用于正弦波,也適用于非正弦波和任何過渡過程的情況.正是基于三相瞬時無功功率理論,我們得以將無功功率作為無功補償時的一個控制目標參數.
1.1 TSC工作原理
TSC(晶閘管投切電容器)的基本工作原理見圖1.圖1a)為TSC的單相電路,其由兩個反向并聯的晶閘管和一個電容器串聯,兩個反向并聯的晶閘管控制電容器的通斷,而串聯的小電網只是用來抑制電容器投入電網時可能造成的沖擊電流的,多數情況,這個電感往往不畫出來.在工程實際中常采用一組由兩個反向并聯的晶閘管的電容器來對電網進行無功補償,見圖1b).其根據電網無功負荷的大小投入適當組別的電容器組,從而可以對電網進行較為精確的無功功率補償.當TSC用于三相電路時,可以采用三角形連接,也可以采用星形連接,但每一相都連接成圖1b)的那樣分組投切.圖1c)為不同電容器組的伏安特性曲線,根據投入的電容器組不同,TSC的伏安特性曲線可以分別是A,B,C.TSC只能對電網補償容性無功.
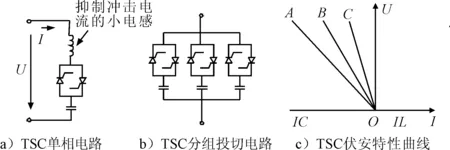
圖1 TSC的基本工作原理
1.2 TSR的工作原理
TSR(晶閘管投切電抗器)的工作原理與TSC的工作原理相類似.晶閘管在其投切過程中同樣只起到開關的作用,所以不會像TCR工作過程中產生較多的諧波,從而對電網造成污染.一般情況下將晶閘管串聯在兩個電抗器之間,可以有效地減小沖擊電流對晶閘管的破壞,單相的TSR見圖2a).三相的TSR可以連接成星形或三角形.TSR的伏安特性曲線見圖2b),其伏安特性曲線位于U-I坐標系的第一象限,根據投切電抗器組數不同其伏安特性特性曲線見圖中的A,B,C.TSR只能對電網補償感性無功.
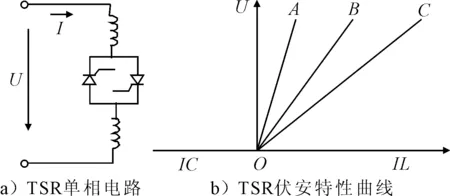
圖2 TSR的基本工作原理
2 TSC+TSR的控制策略
2.1 TSC+TSR的綜合控制
本文采用TSC+TSR對耙吸式挖泥船電網進行無功補償,以功率因數和無功功率為控制目標參數,根據電網功率因數和無功功率值采用雙閉環控制實現對散貨船電網無功功率的動態補償,見圖3,具體的控制細節如下:
1) TSC+TCR的投切判斷設置兩種判據,一是船舶電網的功率因數小于等于0.98;二是當無功補償裝置正常運行時,同時滿足船舶電網的剩余無功功率為容性無功和TSR補償的感性無功大于500 kvar兩個條件.當船舶電網運行于這兩種狀態的任意一種狀態時TSC裝置便會重新進行投切判斷.
2) 電網總無功功率分為兩部分,第一部分是電容器組補償容性無功的實際值的絕對值(1路信號),第二部分是電網剩余無功功率(2路信號,感性無功功率為正值,容性無功功率為負值),此外還有TSC投切控制器根據投入運行電容器組而輸出的容性無功理論補償值的絕對值(3路信號).當進行電容器組投切時將1路信號與2路信號的總和通入TSC投切控制器進行電容器組的投切.當投入電容器組使電網功率因數大于0.98并且穩定保持0.2 s時,1路信號與2路信號切斷,3路信號通入TSC投切控制器,實現對電容器組的投切閉鎖,使用3路信號對TSC進行投切閉鎖能夠避免因電壓波動而造成電容器組的實際補償值越限而造成TSC投切閉鎖失敗.
3) 當TSC進行投切動作時,TSR處于斷網狀態,這樣可以避免其投入電抗器后對電容器組的投切造成干擾.當TSC進行投切閉鎖并經過2.5 s延時后,TSR并入電網并根據電網中剩余無功功率(2路信號)進行投切動作.當電網剩余無功功率為感性無功時,TSR不投入電抗器組.當電網剩余無功功率為容性無功時,TSR根據容性無功功率值進行電抗器組的投入以抵消電網多余的無功功率,使耙吸式挖泥船電網呈弱感性狀態運行.

圖3 TSC與TSR投切控制流程圖
2.2 TSC的投切控制
2.2.1電容器的參數選擇與分組
耙吸式挖泥船電網中的負載大多為三相對稱負載,因此電容器組的連接方式可選擇為三角形連接,為避免電容器組并網時產生大的沖擊電流,需要與電容器串聯一個小電感,電容器組三角形連接時每相電容器的計算公式為
Qc=3U(U/(1/ωC)-ωL)×10-3
(1)
整理得到:
(2)
式中:ω=2πf,為角頻率;L為每相電容器串聯電感值,H;U為線電壓,kV;Qc為電容器組的補償容量,kvar;C為每相所需電容值,F.
本文所選研究對象耙吸式挖泥船發電機組容量與主要負載參數見表1.
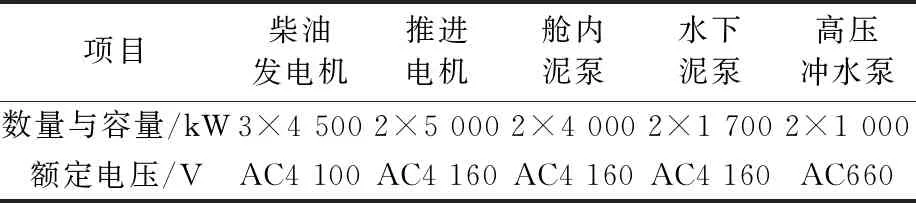
表1 耙吸式挖泥船發電機組容量與主要負載參數
本文選取八組三角形連接的電容器組,每組補償容量分別為200,400,600,800,1 000,1 000,2 000,2 000 kvar,編號分別為1~8,額定電壓為6.6 kV,補償容量為200~8 000 kvar,可以將一個12 000 kVA的船舶電站滿負荷運行時功率因數從0.75提高到0.98.電容器組分組情況見表2.
注:無功功率用區間表示時感性無功-正值;容性無功-負值.
2.2.2電容器組投切震蕩檢測
考慮到電容器組在電網總無功功率的臨界值處可能會出現投震蕩,文中提出了對電網總無功功率進行臨界值判斷的方法.設置的臨界檢測區間見表3.
為避免投切電容器時產生投切震蕩,投切震蕩檢測模塊首先對電網總無功功率是否能夠穩定的落入表3所示區間內,當檢測到電網總無功功率能夠穩定落入到表3的某一區間內0.2 s時,將電網總無功功率減去100 kvar后送入到TSC投切判斷模塊,這樣就可以保證電網總無功功率落入到臨界區間左側的無功功率投切區間,從而避免了產生投切震蕩和容性無功的大量過補償.如果電網中總感性無功功率不能穩定的落入上表中的區間內,TSC投切控制模塊將按照原數值進行電容器組的投切.

表3 電容器組投切震蕩檢測區間
2.3 TSR的投切控制
2.3.1電抗器的參數選擇與分組
TSR中電抗器的連接方式同樣選擇三角形接法,本文選取了三組三角形接法的電抗器組,每組補償容量分別為100,200,300 kvar,額定電壓為6.6 kV,編號分別為1,2,3,補償感性無功容量范圍為100~600 kvar.每相電抗器的電感值計算為
(3)
式中:ω=2πf,為角頻率;L為每相所需電感值,H;U為線電壓,kV;QL為電抗器組的補償容量,var.
電抗器組的分組情況見表4.
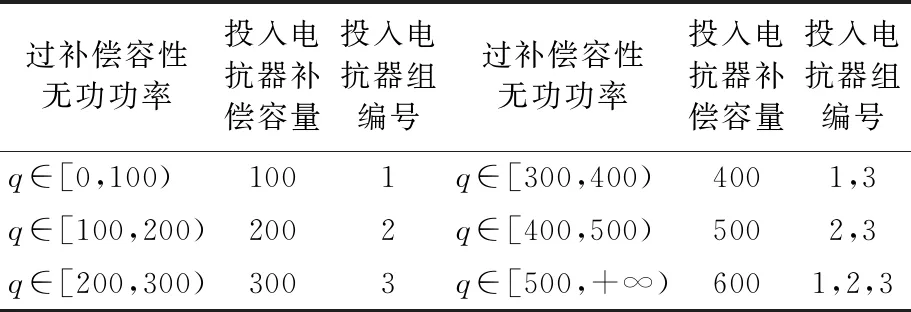
表4 容性無功功率分組及投入對應電抗器補償容量 kvar
2.3.2電抗器組投切震蕩檢測
考慮到當電網過補償容性無功處于電抗器投切分組的臨界值處可能會出現投震蕩,同樣也需要對電網過補償容性無功功率進行臨界值判斷.設置的臨界檢測區間見表5.

表5 電抗器組投切震蕩檢測區間
電抗器投切時的震蕩檢測與電容器組投切時的震蕩檢測相類似,投切震蕩檢測模塊首先判斷電網過補償容性無功功率是否能夠穩定的落入上表所示區間內,當檢測到電網容性無功功率值能夠穩定落入到表5的某一區間內0.2 s時,將電網總無功功率加上50 kvar后送入到TSR投切判斷模塊,這樣就可以保證電網總無功功率落入到臨界區間右側的無功功率投切區間,從而可以有效避免產生投切震蕩和感性無功的欠補償.如果電網中過補償的容性無功功率不能穩定的落入上表中的區間內,TSR投切控制模塊將按照原數值進行電抗器組的投切.
3 仿真實驗與結果分析
本文以Simulink平臺搭建了仿真實驗模型[11-12],仿真模型見圖4.
仿真實驗選擇耙吸式挖泥船的排泥工況進行仿真實驗.排泥工況由艙內泥泵和高壓沖水泵協同工作.假定穩定工況下兩臺高壓沖水泵的有功功率和無功功率分別為1 000 kW和750 kvar,分別在0.8和1.4 s投入運行,穩定工況下兩臺艙內泥泵的有功功率和無功功率分別為4 000 kW和2 800 kvar,分別在2.0和2.6 s投入運行.隨后在8 s時切除一個艙內泥泵負載,進行負載突減仿真實驗.最后在13,13.5和14 s分別投入有功由圖5~7可知:
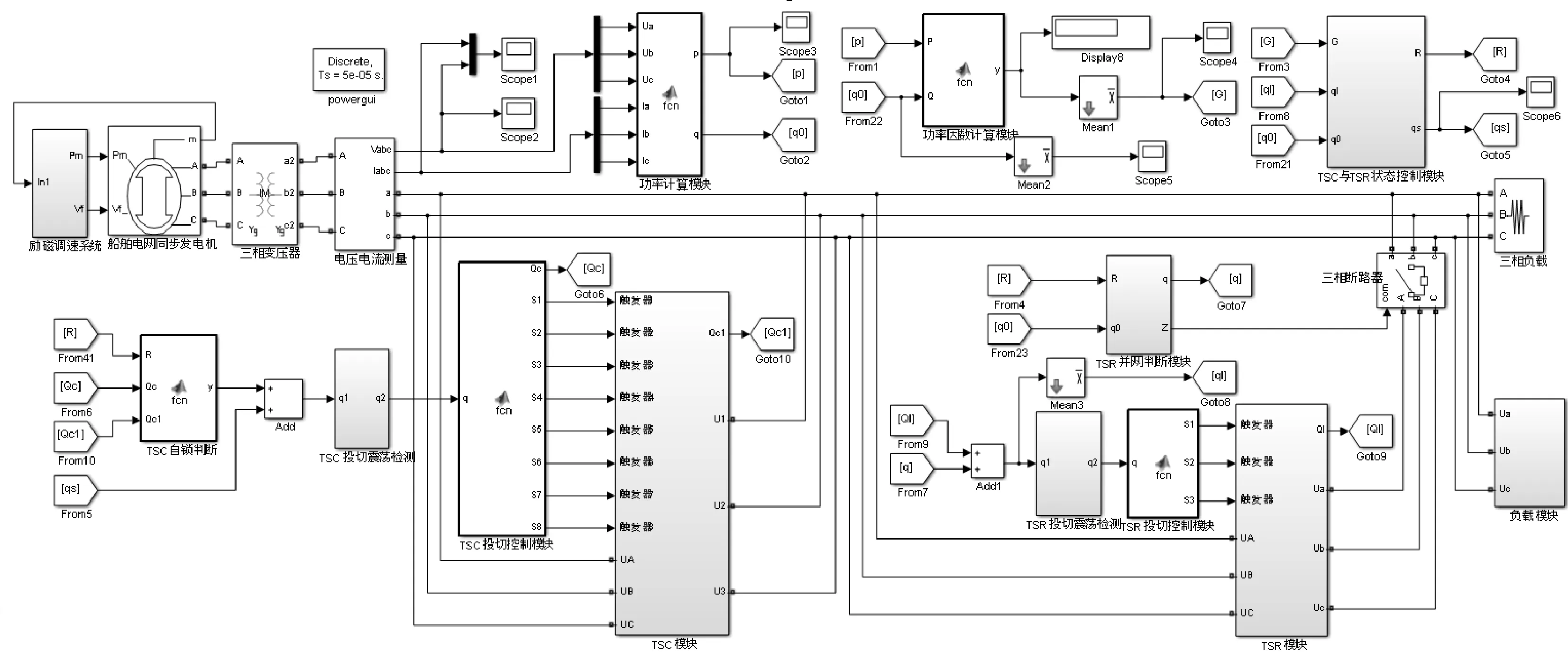
圖4 耙吸式挖泥船電網無功補償仿真模型
功率和無功功率分別為50 kW,45 kvar、80 kW,75 kvar與60 kW,55 kvar的常規動力負載.仿真實驗結果與分析見圖5~7.
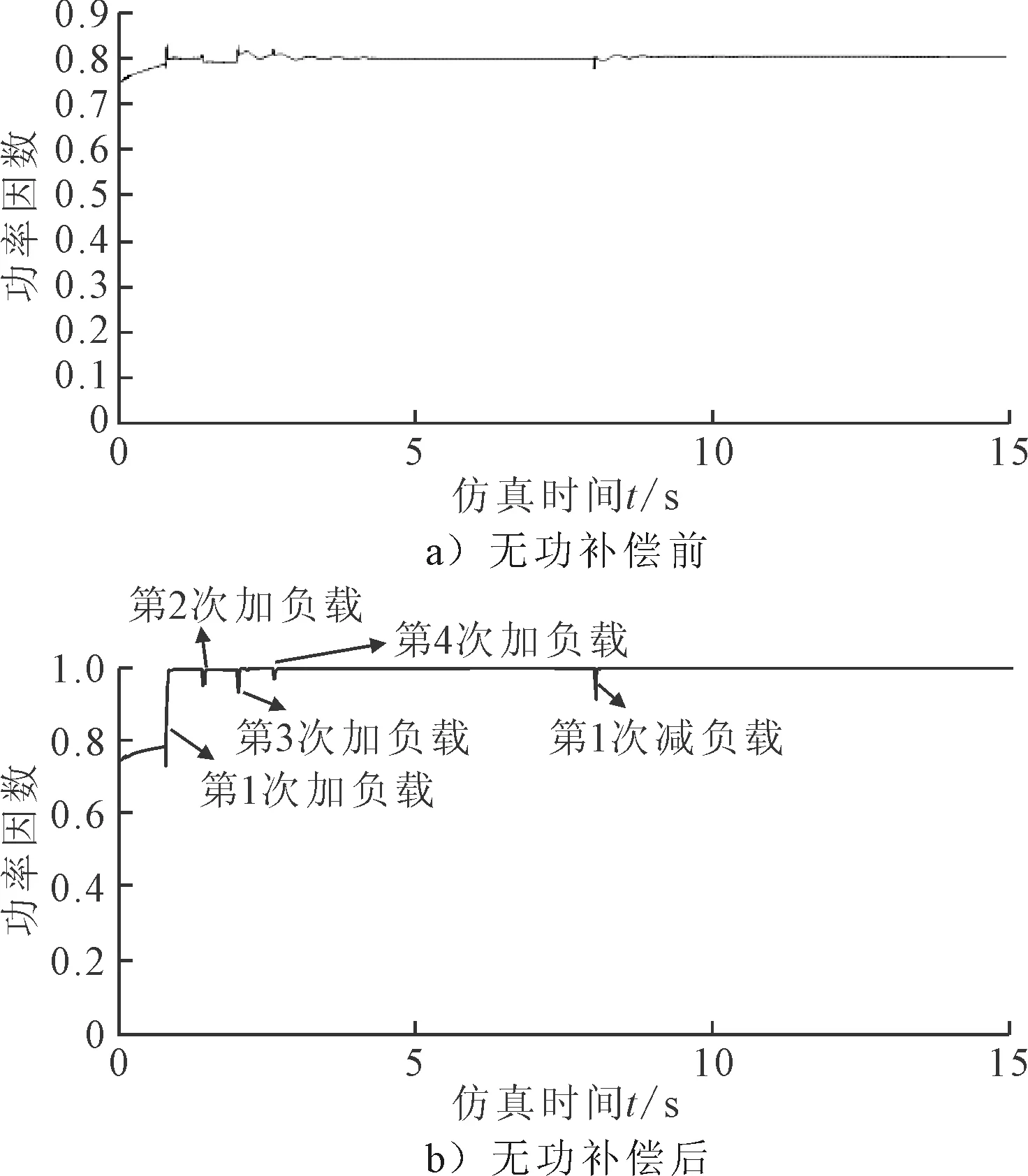
圖5 挖泥船電網進行無功補償功率因數的變化情況
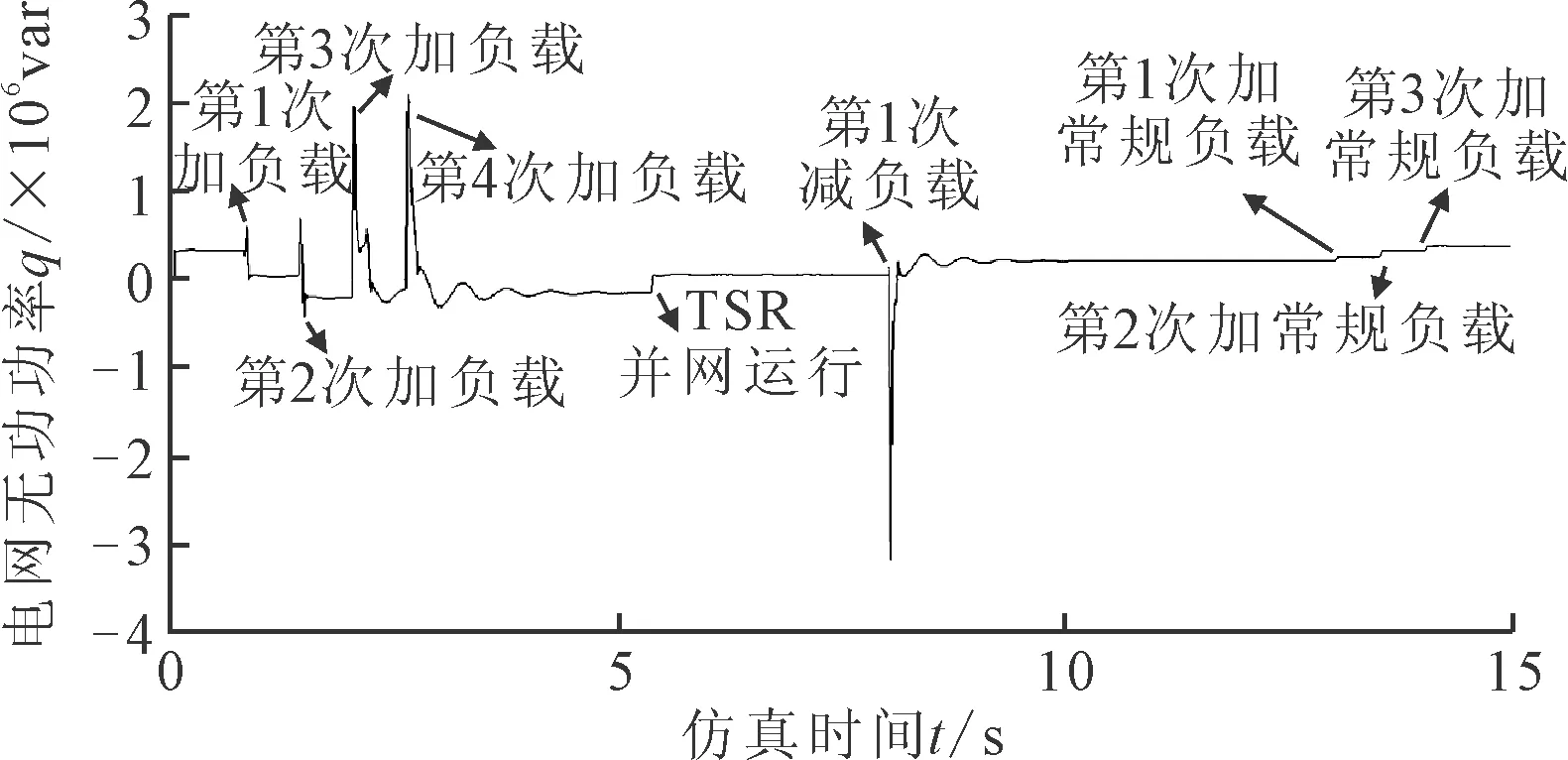
圖6 挖泥船電網進行補償后電網無功功率的變化
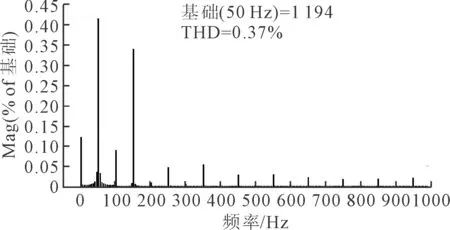
圖7 TSC與TSR共同運行時b相電流總諧波畸變率
1) 耙吸式挖泥船電網未進行無功補償前,在進行負載突變實驗時電網功率因數在0.8左右,進行無功補償后電網的功率因數提高到了0.98以上,功率因數得到了大幅度的提高.
2) 耙吸式挖泥船電網在兩個高壓沖水泵負載與兩個艙內泥泵負載投入運行并趨于穩定后,在5.35 s時TSR(晶閘管投切電抗器)并入電網運行,抵消掉過補償的容性無功,電網功率因數依然保持在0.98以上.
3) 當TSC與TSR共同運行時,在7.7 s選擇了10個周期的電流波形并進行了諧波分析,a,b,c三相電流總諧波畸變率分別為0.19%、0.37%、0.37%,其中b相電流總諧波畸變率見圖7,這表明TSC與TSR共同運行時基本上不產生諧波.
4) 在8 s時切除掉一個艙內泥泵負載,可以看到TSC重新進行了投切動作使電網的功率因數很快再次補償到0.98以上,電網趨于穩定剩余無功功率為感性無功功率,所以TSR并未進行投切動作.隨后在13,13.5和14 s加入常規動力負載時,因功率因數為低于0.98,TSC仍處于投切閉鎖狀態.
4 結 論
1) 以耙吸式挖泥船電網功率因數和無功功率兩個目標參數相結合來進行電容器組和電抗器組的投切,能夠快速準確的將電網的功率因數提高到0.98以上.
2) TSC+TSR混合無功補償裝置能夠很好的解決耙吸式挖泥船電網容性無功過補償的問題,使電網呈弱感性運行,同時該混合無功補償裝置在運行過程中基本不產生諧波對電網造成污染.
3) 當耙吸式挖泥船電網處于中度或重度負荷時,由于較小的無功功率變化對功率因數的影響較小,TSC能夠穩定的運行而不進行頻繁的投切動作,可以有效的提高晶閘管的使用壽命.