卵礫石輸移壓力實時監測系統設計與實現
2020-06-04 09:10:46臧彤,田蜜
廣東水利水電 2020年5期
關鍵詞:設備
臧 彤,田 蜜
(重慶交通大學河海學院,重慶 400074)
三峽水庫實際運行后,與論證期間相比,水庫調度方式、水沙條件發生變化,新的水沙條件下入庫推移質大幅減少,水庫淤積平衡時間延長[1]。初步分析三峽變動回水區原型觀測數據得知:三峽水庫175 m蓄水后,盡管三峽入庫的卵礫石推移質少,但消落期在枯水航槽集中輸移,極易出現卵礫石沙波運動礙航和航槽淤積礙航,三峽變動回水區面臨著卵礫石輸移導致的礙航問題[2]。為解決這一難題,重慶交通大學研發了卵礫石輸移壓力與音頻實時觀測設備(GPVS)。
MATLAB是一種高效的工程計算語言,其中設備控制箱提供對RS-232/RS-485通信標準的串口通信支持[3],不僅具有強大的科學計算功能,還能進行數據采集以及界面的設計和開發。現將串口通信技術應用于卵礫石運動原型觀測,利用MATLAB自帶的圖形界面開發環境GUIDE設計GUI,通過設備工具箱,實現RS485通訊完成傳感器壓力信號的采集,并在GUI上完成數據歸一化處理[4]。
本文基于MATLAB平臺GUI設計串口通訊網絡,配合觀測設備GPVS,開發卵礫石輸移壓力實時監測系統,應用于原型觀測中,可實時獲取水下壓力數據變化,觀測人員能實時了解水下卵石運動情況,大大提高推移質輸移觀測精度和時效性。
1 基于水下壓力傳感器的GPVS
1.1 觀測設備GPVS結構
GPVS設備主體由上下兩塊鋼板及鋼制保護罩組成,整體高度為11 cm左右,上鋼板尺寸為60 cm×60 cm,是整個測量系統的主要接觸面,下鋼板尺寸為60 cm×60 cm。整個設備重量約為80 kg,自重保持設備在水下穩定而不被沖走。圖1為GPVS設備透視示意,設備核心部分是位于上方鋼板下面的水下壓力傳感器,壓力傳感器長×寬×高為170 mm×35 mm×45 mm,傳感器均采用防水技術水密處理,4個傳感器傳輸線匯聚成1根由防護罩側面預留孔穿出,傳輸線在儀器外部的部分套有金屬軟管保護。水下壓力傳感器共有4個,分布在儀器的四角為1#、2#、3#、4#,與鋼板直接接觸,傳感器頂部用螺絲與頂板連接,壓頭放置于底板的凹槽內,壓力傳感器支撐起整個結構,1#~4#傳感器的壓力總和即為GPVS壓力數據。鋼制保護罩起防止卵石沖擊設備內部的作用,其下方與下鋼板用螺絲固定,上方與上鋼板之間留有1~3 mm左右的縫隙,保證壓力傳感器能上下自由活動,縫隙四周貼有透明膠皮,膠皮可以防止細小泥沙顆粒進入設備內部影響壓力數據。
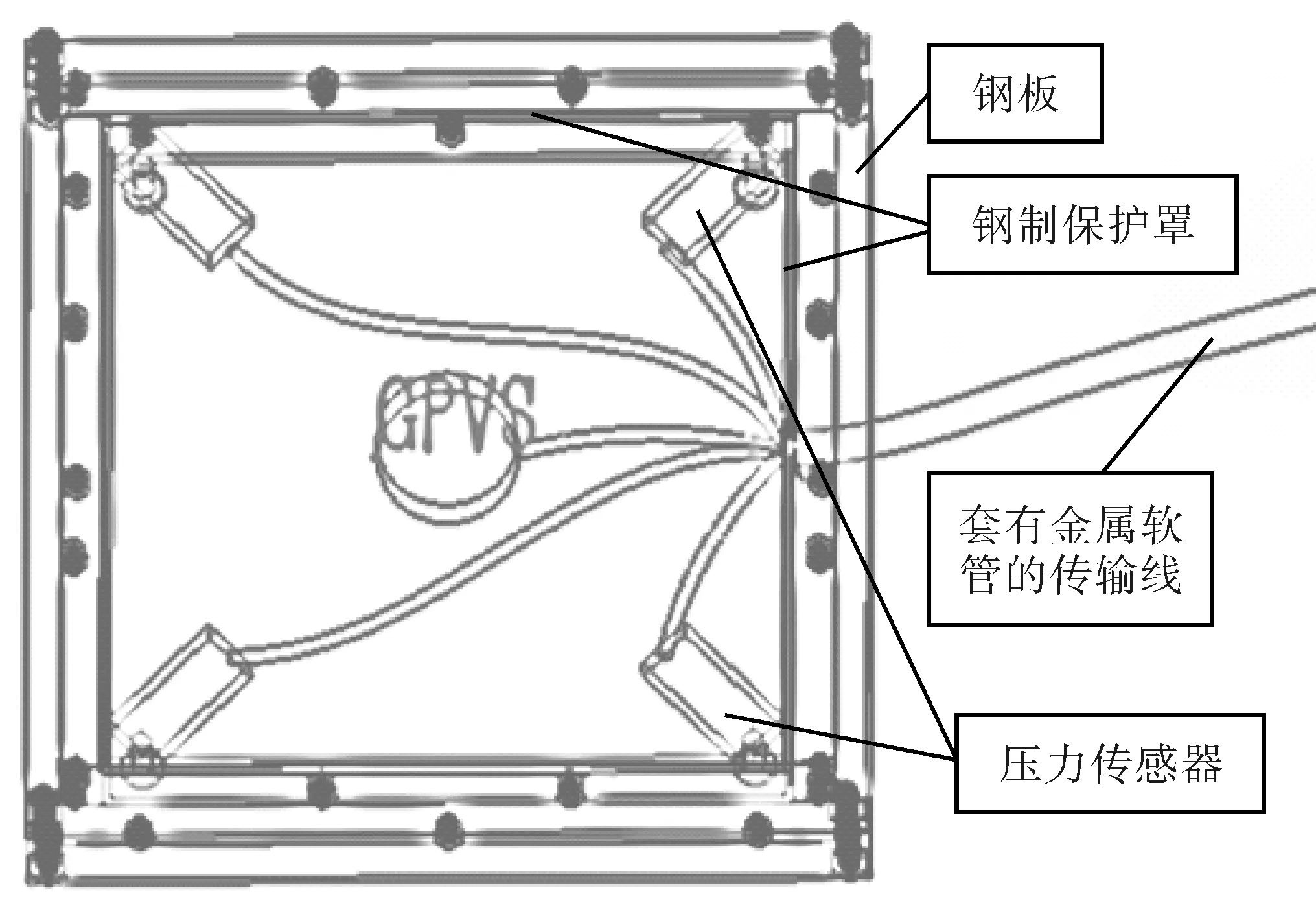
圖1 GPVS透視示意
1.2 水下壓力傳感器關鍵技術
1.2.1傳感器通訊方式
GPVS采用的水下壓力傳感器為GXBDW-ADSS型號,因在水下幾十米使用,傳感器采用全激光焊接,有效避免水流的侵蝕。壓力傳感器采用RS485方式通訊,可實現長達1 000 m的有線通訊。
1.2.2協議指令及解析
GPVS儀器內部的1#~4#傳感器擁有獨立的地址為01~04,傳感器發送協議指令采用 “幀頭+主機命令+地址+內容”方式,發送數據為主機命令,即從PC機傳輸至傳感器,需傳感器執行的命令;傳感器接收協議指令采用“幀頭+應答命令+地址+內容”方式,接收的數據為模塊應答,即傳感器響應主機命令,返回給主機的指令。
GPVS實際壓力數據為4個傳感器之和,由于單個讀取傳感器重量數據步驟繁雜且不能實時得到壓力數據,因此,重量讀取采用同步報數的方法。同步報數指令主機發送“11+幀頭(27)+主機命令+開始地址+結束地址”,傳感器收到指令,首先將自身重量放入緩沖區待發,然后從開始地址的傳感器開始各自發送自身重量,每個傳感器會實時監測發送傳感器的地址,當輪到自己發送時及時發送緩沖區重量,這樣可以便捷快速的得到傳感器壓力數據總和,為下一步的計算提供保證。
由于在傳感器計算過程中,接收的初步生成壓力信號為單精度浮點數形式數據,此數據無法讓用戶直觀了解壓力變化狀況,因此,本系統設置了進一步換算功能。計算遵循IEEE-754標準將單精度浮點數形式的原始數據轉換為十進制的數據,最后乘以內部協議的換算系數得到單位為kg的重量數據,用戶最終得到的數據單位為kg(見圖2),如此即可實現壓力值實時直觀顯示。
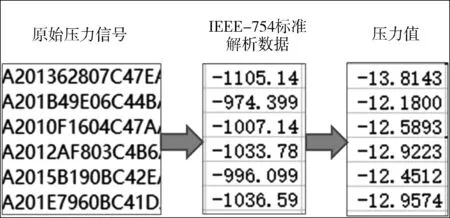
圖2 壓力數據解析過程示意
2 卵礫石輸移壓力實時監測系統
2.1 系統架構
在現有卵礫石輸移觀測設備GPVS的基礎上,提出了卵礫石輸移壓力實時監測系統研究方案,其系統結構見圖3。以1臺GPVS、1套供電系統以及PC機為例,供電系統由裝有蓄電池的供電箱以及3塊太陽能采集板組成,是為觀測設備GPVS以及PC機提供電力輸出;GPVS采集的壓力數據信號通過串口網絡通訊沿傳輸線發送到PC機緩沖區,保存在物理上分布的存儲系統中,通過更換存儲設備,觀測人員可獲得已采集的卵礫石輸移壓力數據。

圖3 卵礫石輸移壓力實時監測系統結構示意
2.2 網絡通訊結構
卵礫石輸移壓力實時監測可視化系統的網絡通訊結構是基于MATLAB平臺GUI串口通訊功能,如圖4所示,整個系統實現通訊分為兩個階段:即系統對觀測設備GPVS壓力數據的初步獲取階段以及在MATLAB的GUI上實現數據的處理并實時顯示階段。GPVS內傳感器數據采集原理為傳感器工作的壓力信號通過AD轉換傳送給下位機,下位機采用MSP430F247,通過RS485串口將數據發送到PC機的緩沖區[5],GUI界面利用MATLAB的串口通訊實現壓力傳感器的壓力信號獲取。

圖4 基于MATLAB平臺GUI的系統網絡通訊架構示意
觀測人員可根據傳感器地址發送相應指令獲取壓力數據,同時利用MATLAB GUI的繪圖功能繪制高質量的曲線圖,實時顯示壓力數據變化曲線。
3 原型觀測及分析
目前重慶交通大學已在寸灘水文站投放GPVS觀測設備6套,下一步將在三峽庫尾變動回水區典型灘險進行GPVS設備的投放,通過現場實地考察,選取胡家灘、三角磧、朱兒磧、廣陽壩,洛磧、碼頭磧6處典型灘險投放GPVS設備。以胡家灘現場觀測數據為例,分析卵礫石輸移壓力監測系統的現場應用情況。
胡家灘河段礙航主要是消落期水流條件造成卵石輸移變化導致的,從近幾年收集的資料以及現場壓力數據看,卵石輸移主要發生在4月,選取4月變化有代表性的幾日,通過現場獲取壓力數據推測其卵石輸移狀態(僅分析GPVS總變化值)。
3.1 現場壓力數據
1) 壓力平緩變化
2019年4月18日,胡家灘淺灘投放GPVS觀測設備1周,卵礫石在平緩增加后堆積在GPVS表面,且在新一批卵礫石輸移來的同時堆積卵石也輸移離開。4月18日測圖顯示,5:00—7:00卵石重量由43.1 kg增加至49.8 kg,并逐漸增加,于14:00達到最大重量 52.9 kg,然后緩慢下降至48.9 kg。據壓力變化可知,輸移量不大,堆積量不多(見圖5)。

圖5 4月18日卵石輸移壓力變化示意
2) 壓力陡增變化
2019年4月22日,胡家灘GPVS觀測設備監測到新的卵石輸移壓力變化,卵礫石在陡然增加后堆積在GPVS表面,而后呈線性變化逐漸輸移離開。對4月22日測圖進行分析知,6:00—7:00卵石重量由52.5 kg陡然增加至64.5 kg,接著線性減少到53.4 kg,然后平緩增加至63.5 kg。據壓力變化可知,存在卵石移動沙體迅速輸移至GPVS來又逐漸離開的現象(見圖6)。

圖6 4月22日卵石輸移壓力變化示意
3) 壓力線性減少
2019年4月23日,胡家灘淺灘整體壓力變化不大,堆積在GPVS表面的卵礫石呈線性減少變化逐漸輸移離開。對4月23日測圖進行分析知,0:00—23:00卵石重量由64.7 kg線性減少至58.1 kg,據壓力變化可知,卵石移動沙體輸移呈現線性減少現象(見圖7)。
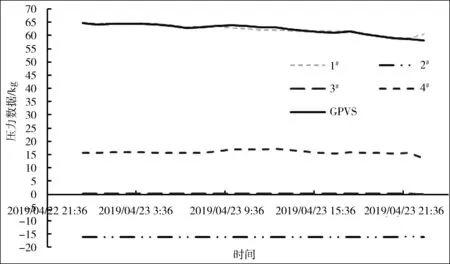
圖7 4月23日卵石輸移壓力變化示意
4) 壓力陡降變化
2019年4月24日,胡家灘淺灘投放GPVS觀測設備2周,堆積在GPVS表面卵礫石首先線性減少,而后陡然減少輸移離開趨于平緩。對4月24日測圖進行分析知,0:00—6:00卵石重量由56.8 kg線性減少至52.2 kg,6:00—7:00又陡然減少到38.8 kg,然后卵石重量上下浮動不大。據壓力變化可知,存在堆積在GPVS表面卵礫石突然輸移離開的現象(見圖8)。

圖8 4月24日卵石輸移壓力變化示意
3.2 卵礫石輸移狀態
根據實際調查收集的資料以及現場壓力數據情況,概化出了胡家灘4月卵礫石輸移狀態示意(見圖9)。從圖9可以看出,自胡家灘淺灘投放GPVS觀測設備以后,隨時間的變化卵石沖淤狀態不斷發生改變,卵石移動沙體在GPVS表面進行多次推移。圖9中所展示的僅為典型灘險觀測的一小部分,要了解整個消落期各淺灘卵礫石輸移狀態還需進行更多的觀測及分析。
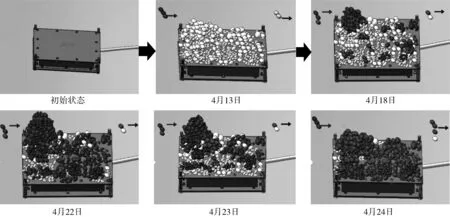
圖9 胡家灘卵石輸移狀態示意
4 結語
三峽水庫175 m蓄水后,卵礫石推移質消落期在枯水航槽集中輸移,極易出現卵礫石沙波運動礙航和航槽淤積礙航,但受限于卵礫石運動原型觀測技術的發展,現有觀測技術在對卵石運動過程以及強度的實時跟蹤觀測方面仍有一定困難,不能有效、實時的反映卵石運動過程。重慶交通大學研發了卵礫石輸移壓力與音頻實時觀測設備(GPVS),本文基于MATLAB平臺GUI設計串口通訊網絡,配合觀測設備GPVS,開發卵礫石輸移壓力實時監測系統:一是系統可直接應用于航道泥沙原型觀測中,為航道泥沙研究的發展提供重要的技術支撐;二是能實時了解水下卵石輸移狀態,大大提高推移質輸移觀測精度和時效性;三是可實現河道橫斷面多點、多區域長期的同步實時顯示。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
