無人機用渦噴發動機轉速不跟隨油門故障分析
2020-06-05 02:54:20郭政波房劍鋒劉振剛
燃氣渦輪試驗與研究 2020年1期
郭政波,房劍鋒,劉振剛
(中國飛行試驗研究院發動機所,西安 710089)
1 引言
無人機(UAV)以其優越的作戰性能得到了世界軍事強國的高度重視。特別是高空長航時無人機、無人作戰飛機、無人轟炸機以及高超聲速無人機等高端無人機,已成為國際軍事領域研究的熱點[1-2]。作為無人機的心臟,動力裝置對無人機的性能、成本和可靠性等具有決定性影響[3]。近年來,隨著先進無人機戰技指標的不斷提升,相應地對發動機技術指標提出了更加苛刻的要求,要求發動機在高空低壓、低溫、低速環境下,具備耗油率低、較大負載和引氣、油門速率限幅、工作穩定等主要能力。要實現這些能力,發動機燃油控制系統的功能、性能及其高可靠性就顯得尤為重要[4-6]。為此,業內專家對發動機燃油系統進行了大量研究。李波等[7]針對航空發動機燃油熱管理系統進行了AMESim建模仿真及試驗驗證,為工程人員開展航空發動機燃油熱管理系統方案設計和評估提供了參考。張東輝等[8]就高溫燃油特性變化對發動機控制系統、液壓機械裝置、電器元件和發動機滑油系統的影響進行了分析,給出了燃油溫度限制的參考值。曹惠玲等[9]應用貝葉斯網絡對航空發動機燃油泵組件進行了故障征兆分析和概率計算、數據驗證,引入了代價函數對結果進行評估,為航空發動機燃油系統安全運行提供了合理可靠的檢測途徑。楊康等[10]針對航空發動機燃油系統故障樣本少難以診斷的問題,提出采用分層SDG模型進行故障診斷,縮小故障源搜索空間,根據測量節點之間內在聯系向前搜索,獲得了備選故障源的集合。而在工程應用中,航空發動機主燃油系統在性能設計或制造水平上的提高,離不開一次次的排故和技術積累,特別是實際飛行中所出現故障的分析定位尤為重要。
本文針對無人機用渦噴發動機試飛中出現的轉速不跟隨油門故障,通過對比發動機地面故障復現試驗及實際試飛中轉速不跟隨油門故障數據,分析了主燃油系統工作原理,構建了故障樹,分析了故障機理,定位了故障原因,并給出了相應的解決措施;在地面試驗和后續試飛中對解決措施的可行性和有效性進行了驗證,為促進無人機用渦噴發動機的研發提供了技術支撐。
2 燃油系統工作原理
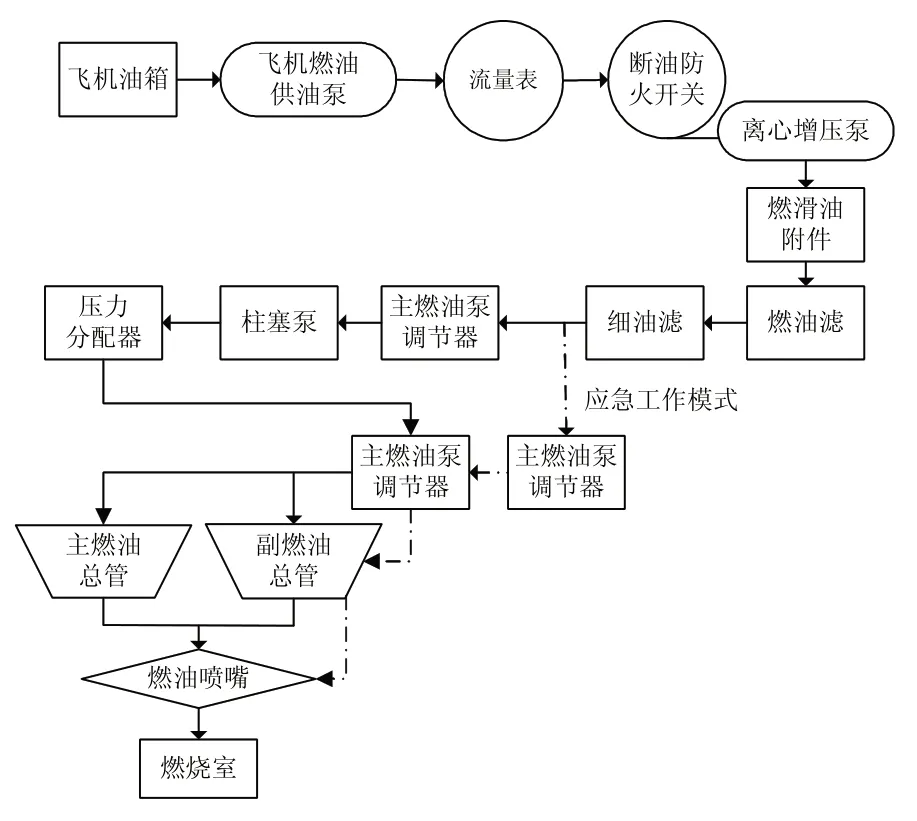
圖1 燃油系統工作原理Fig.1 Working principle of fuel system
發動機燃油系統的功能是向燃燒室供給一定壓力和流量的燃油,當油門變化時能迅速可靠地改變其工作狀態,同時防止發動機超溫、超壓、超轉,保證航空發動機迅速可靠起動。無人機用渦噴發動機燃油系統主要由離心增壓泵、燃油濾、主燃油泵調節器(簡稱主泵)、燃油噴嘴等組成,其工作原理如圖1所示。發動機工作時,燃油從飛機油箱流出,經飛機燃油供油泵→流量表→斷油防火開關→離心增壓泵→燃滑油附件→燃油濾→細油濾后進入主泵。正常情況下,進入主泵的燃油被柱塞泵增壓后經壓力分配器進入主泵,然后到主、副燃油總管,經燃油噴嘴進入燃燒室。應急工作模式下,由副油路單獨供給燃燒室燃油(圖1中虛線所示)。
當無人機在巡航高度執行任務時,所處環境的大氣壓力和溫度較低,空氣密度小,無人機任務載荷設備需要較大的負載和引氣,發動機工作穩定裕度較低,工作可靠性降低。同時,高空低速飛行時雷諾數較低,還會帶來發動機性能下降等問題。為改善燃油霧化效果,增加燃燒室的燃燒穩定性,發動機采用副油路單獨供油,以提高副油路供油壓力和發動機油氣匹配度,保證發動機正常穩定工作。具體供油控制規律為:若副油路壓力小于設定閾值且滿足判定周期后,發動機電子控制器會自動接通斷油電磁閥,切斷主油路通往燃燒室的油路,由副油路單獨向燃燒室供油;當無人機從巡航高度開始下降后,發動機電子控制器自動收油門到慢車,斷開斷油電磁閥,恢復主、副油路供油。
3 故障現象
3.1 飛行故障現象
無人機在巡航高度執行任務過程中,共出現了3次發動機轉速不跟隨油門故障,且情況基本相同。首次故障具體描述如下:無人機在巡航高度以有利巡航速度飛行,發動機副油路單獨供油,從油門桿角度α=43°收至高空慢車(α=33°)過程中,發動機低壓轉子相對換算轉速與α不對應,發動機出現了轉速不跟隨油門故障,如圖2所示。

圖2 發動機轉速不跟隨油門歷程曲線Fig.2 The process curve of engine speed not following the throttle
3.2 地面故障復現
根據飛行故障現象描述,開展主燃油泵調節器地面故障復現試驗。為模擬發動機發生故障時的工作情況,在主燃油泵試驗器上設定了3個試驗條件:①關閉主油路;②=93%;③起動自動器高空慢車調節薄膜壓差Δpm=10~50 kPa。在主燃油泵調節器地面故障復現試驗中,將油門桿調至α=43°,穩定后收油門桿至高空慢車位(α=33°),供油量W基本保持不變,與飛行中故障現象相似。試驗結果如表1所示。
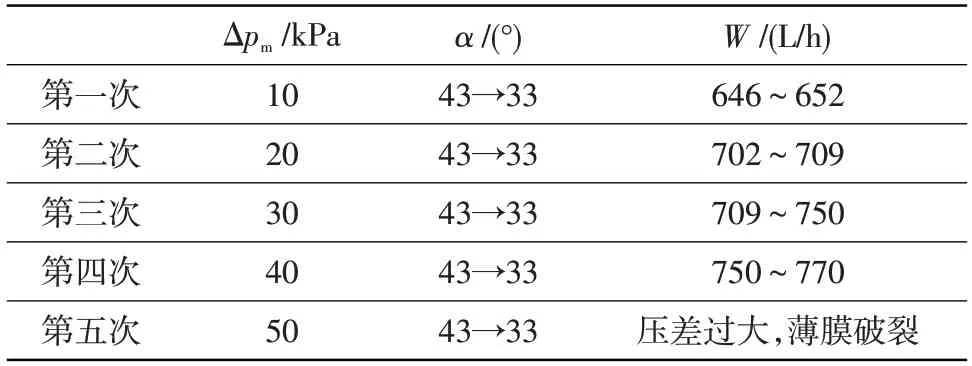
表1 故障復現試驗結果Table 1 Failure recurrence test results
4 故障分析
4.1 故障樹
分析發動機工作機理和系統部件間的邏輯關系[11],針對可能引起發動機轉速不跟隨油門的故障模式建立故障樹,如圖3所示。根據故障樹,導致轉速不跟隨油門的因素可集中歸類為飛機系統和發動機系統兩大塊。根據飛行歷程復查、飛行員描述、故障機理、飛參數據分析和地面試驗,對故障樹中描述的事件開展排查分析:
(1) 燃油化驗正常,可排除油污染事件。
(2) 故障后無人機應急返航,發動機地面開車檢查工作正常、控制邏輯正確,可排除油門桿反饋不準確、主機故障、電路故障、電子控制器故障。
(3) 通過地面開車、部件分解以及主燃油泵調節器故障復現試驗,排除了柱塞泵故障、定壓差活門故障、定壓活門故障、放油活門故障、慢車活門故障、油門開關油針故障、中心油濾堵塞、燃油急降電磁閥故障、斜盤故障、油門桿故障。

圖3 發動機轉速不跟隨油門故障樹Fig.3 Fault tree of engine speed not following the throttle
(4) 通過飛行員描述、安全監控及飛參數據分析,燃油調節電磁閥關斷和恢復主油路功能正常,排除燃油調節器故障。
(5) 開展地面臺架摸底試驗,轉速調節器調節靈敏性好,功能正常,排除轉速調節器故障。
(6) 壓力分配器負責分配主、副油路燃油,飛行中功能正常。
(7) 升壓限制器在發動機加速時負責限制副油路油壓升高速度,僅對加速性能有影響,可排除。
(8) 起動自動器和液壓延遲器負責高空慢車轉速控制,與本次故障密切相關,且地面故障復現表明這兩個部件很可能是故障源。
4.2 故障機理分析
從發動機高空慢車供油核心調節部件——起動自動器入手進行分析。起動自動器由活門、調節薄膜、平衡彈簧等組成,主要作用是保證發動機進入到慢車狀態所需供油,其工作原理如圖4所示。圖中,pfu為副油路壓力,p0為大氣壓力,p3為壓氣機后空氣壓力。
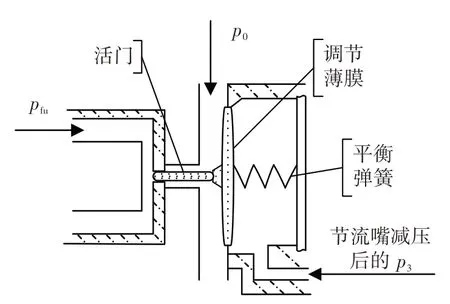
圖4 起動自動器工作機理Fig.4 Working mechanism of the starter
當無人機在巡航高度工作時,發動機主燃油泵調節器關閉主油路,僅副油路供油,活門左側的副油路燃油壓力會迅速升高。而壓氣機后空氣壓力經節流嘴減壓后進入調節薄膜右腔,調節薄膜左腔與大氣相通,大氣壓力與減壓后的壓氣機后空氣壓力共同作用使平衡彈簧伸縮,因此活門的開度取決于活門兩端的作用力。如果活門左側的燃油壓力大于活門右側的壓力,活門就會打開,大量燃油進入低壓腔,造成低壓腔壓力升高。由于液壓延遲器調節活塞直接由低壓腔燃油和定壓油的壓差調節,因此當低壓腔壓力升高到一定程度后,液壓延遲器調節活塞壓差低于裕度值,液壓延遲器活塞隨油門桿的作動失效,導致轉速不跟隨油門故障。
4.3 起動自動器活門及薄膜壓力分析
起動自動器活門打開后,放油嘴直徑D1=4.2~5.2 mm,調節薄膜有效直徑D2=5.4 mm,薄膜內三組彈簧的剛度系數k分別為1.665、2.355和3.675,彈簧壓縮量極限值為3.0 mm。根據起動自動器和液壓延遲器轉速調節機理,以活門為對象,可建立活門打開的薄膜壓差與副油路壓力、伸縮量的關系:

式中:Δx為彈簧伸縮量。
基于地面故障復現試驗數據,通過公式(1)計算得到不同彈簧在最大和最小壓縮量下活門打開極限情況下薄膜壓差與副油路壓力的關系,見圖5。從圖中可看出,故障中薄膜壓差均小于活門打開的極限薄膜壓差,活門左側油壓大于右側壓力,起動自動器活門打開,大量放油,直接導致了故障的發生。
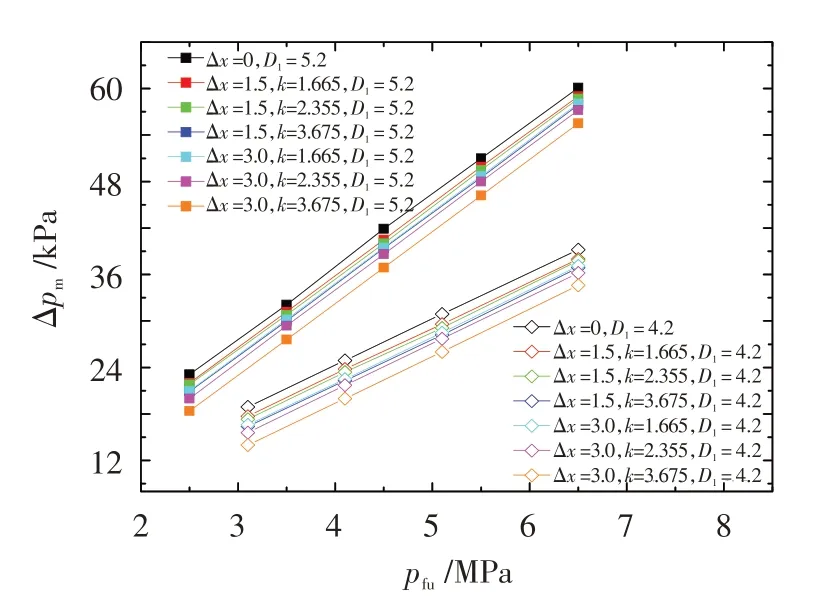
圖5 活門打開極限情況下薄膜壓差與副油路壓力的關系Fig.5 The relationship between the differential pressure of the thin film and the auxiliary oil pressure under the valve opening limit
薄膜腔壓力的減壓系數pm/p3與壓比p0/p3的設計特性曲線如圖6所示。以調節薄膜為對象,建立薄膜兩端壓差關系:

式中:pm為薄膜壓力。
表2示出了實際試飛中出現的3次轉速不跟隨油門故障的主要壓力參數,以及對照圖6設計特性曲線通過公式(2)計算得到的3次故障的薄膜壓差。
5 解決措施及驗證
圖7為故障發動機起動自動器供氣管路示意圖。壓氣機后空氣壓力經放氣嘴和放氣窗分壓后進入薄膜腔。其中,放氣窗在高轉速、高壓比下投入工作,取消放氣窗可以提高薄膜腔壓力,達到關閉起動自動器活門放油的效果。
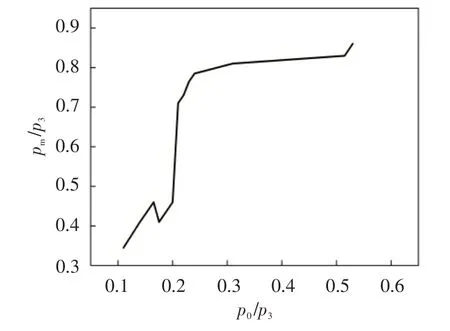
圖6 薄膜腔減壓系數與壓比的設計特性曲線Fig.6 Design characteristic curve for thin film pressure reduction coefficient and pressure ratio

表2 3次故障活門前后的壓力Table 2 Pressure before and after the valve during three faults
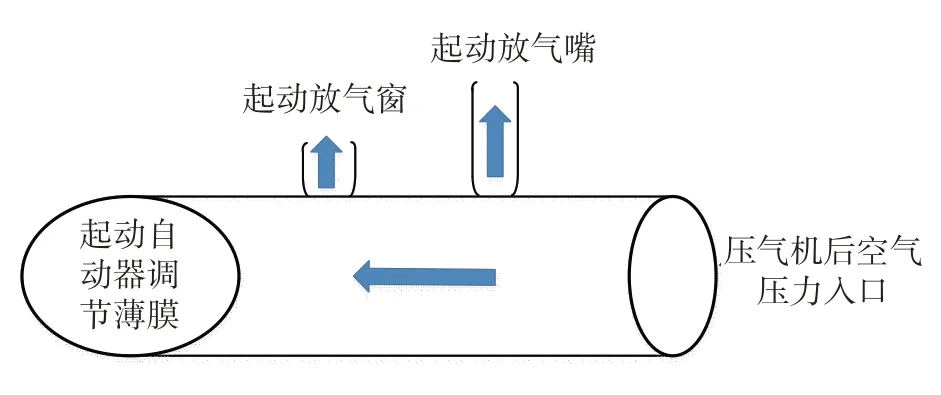
圖7 起動自動器進氣管路示意圖Fig.7 Schematic diagram of starter inlet line
5.1 取消放氣窗可行性分析
從發動機壓氣機引氣,經節流作用以及起動放氣嘴和放氣窗分壓后供給起動自動器薄膜腔。由圖6可知,帶放氣窗的壓比p0/p3在0.25以上時,減壓系數較小,減壓作用不明顯;當p0/p3小于0.25時,則有明顯的減壓放氣作用。起動自動器放氣嘴直徑范圍為0.8~1.8 mm,取消放氣窗后,計算所得減壓系數見表3。可見,在放氣嘴直徑范圍,最低減壓系數為0.70,此時起動自動器薄膜壓力最低。發動機出現故障時減壓系數約為0.30或更小,因此取消放氣窗后起動自動器能夠關閉活門,避免放油。
5.2 取消放氣窗影響分析
取消起動自動器放氣窗后的影響分析如下:
(1) 起動時,壓比p0/p3較高,放氣窗未投入工作,不影響起動。
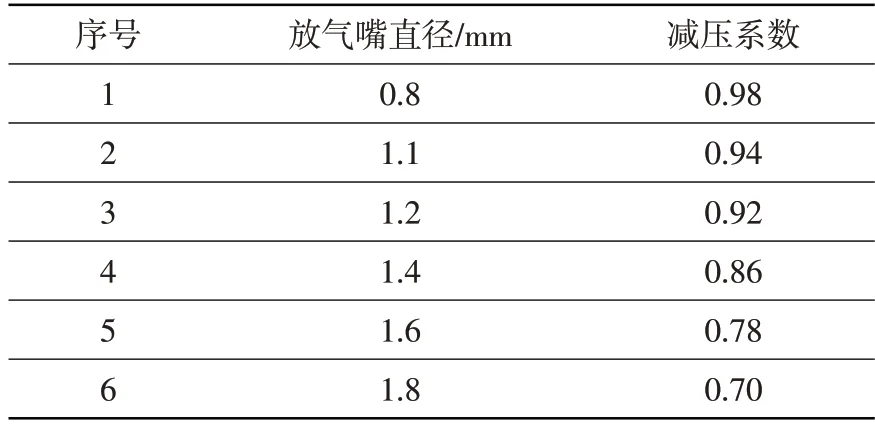
表3 不同放氣嘴減壓系數Table 3 Reduction coefficients of different deflation valve
(2) 該型無人機用發動機使用包線窄、飛行表速低,壓氣機后空氣壓力也較低,使用中壓氣機后最大靜壓不超過1.0 MPa,高空中壓力更低,而薄膜材料可承受約1.3 MPa壓力,因此取消起動自動器供氣管路上的放氣窗安全可靠。
5.3 試飛驗證
針對故障解決措施進行了實際試飛驗證,結果如圖8所示。從圖中看出,實施解決措施后的發動機在巡航高度飛行時轉速與油門桿角度匹配正確、跟隨性好,符合設計指標。
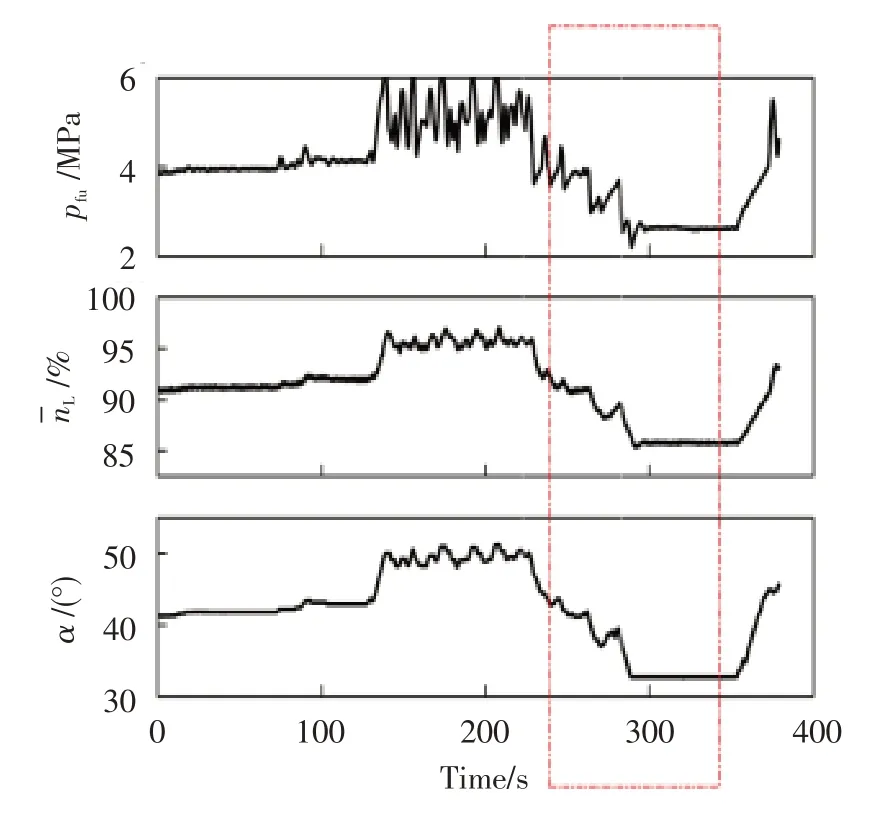
圖8 實際試飛驗證結果Fig.8 Verification results of actual flight test
6 結論
(1) 發動機在巡航高度工作時,副油路單獨供油,起動自動器活門前油壓升高明顯,大于活門后調節薄膜腔壓力,致使活門打開、大量放油,液壓延遲器低壓腔壓力升高、作動失效,喪失轉速調節功能,最終導致轉速不跟隨油門故障。
(2) 取消起動自動器供氣管路上的放氣窗,可提高薄膜腔壓力,關閉起動自動器活門放油,既能保證起動自動器正常工作,也可解決高空轉速不跟隨油門故障;實際試飛也驗證了這一解決措施的可行性和有效性。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15