低重頻雷達回波準最大似然速度估計
2020-06-06 10:54:10朱天林黃亞楠傅茂忠鄧振淼
雷達科學與技術 2020年2期
關鍵詞:信號
金 勝, 朱天林, 黃亞楠, 傅茂忠, 鄧振淼
(1.北京跟蹤與通信研究所, 北京 100094; 2.廈門大學信息科學與技術學院, 福建廈門 361005)
0 引言
脈沖雷達是目前廣泛使用的雷達體制,而其固有的速度模糊問題一直沒有很好的解決方案[1-2]。在雷達信號處理領域,火箭、導彈等高速目標的快速捕獲和跟蹤一直是研究熱點,近年來具有高速高機動特性的臨近空間飛行器使脈沖雷達面臨更加艱巨的挑戰[3-10]。跟蹤這類高速目標時的速度模糊現象會產生錯誤信息并嚴重影響接下來的目標檢測、成像和跟蹤等算法的性能[11]。為此,本文對脈沖雷達的速度解模糊問題進行深入研究。
目前已經有多種方法可以實現解多普勒模糊。廉志玲等提出利用發射多重頻脈沖信號的方法來解速度模糊,但是這類方法計算量較大且需要改造雷達相應硬件結構,不利于工程實現[12]。孟飛等研究使用距離跟蹤數據的微分值來解速度模糊。該方法通常需要2 s以上的觀測時間才能得到較為平穩的觀測值。另外由于距離跟蹤數據存在測量誤差,因此該方法的誤差較大[13],濾波器輸出結果的速度估計值精度通常在十幾米每秒左右。李亞超等對寬帶信號采用相鄰相關法進行速度估計,可以得到目標的無模糊速度,但是該算法不適用于窄帶信號[14]。蘇軍海等基于Radon變換,通過構造代價函數的方式對速度模糊折疊數進行搜索[15]。該方法由于使用了基于圖像的處理方法,因此需要在高信噪比條件下使用大量脈沖數進行估計。綜上所述,目前已有的解模糊算法在脈沖雷達上的工程實現受到了諸多限制,且性能還不夠理想。
本文分析了脈沖雷達的目標回波信號,在不改變現有脈沖雷達系統的基礎上,根據回波信號的似然函數的分布特性提出了一種速度粗估計方法。該方法基于相參脈沖回波信號的距離-速度模糊函數的盲速旁瓣在速度真值處達到最大值,在真值兩側的旁瓣對稱逐漸減小的性質,通過合適的算法設計搜索盲速旁瓣的峰值位置,該位置對應的速度即為目標速度估計值。本方法利用通常認為是不利且盡量避免的盲速旁瓣進行速度粗估計,只需要利用少數脈沖即可以得到目標速度的估計值,在脈沖重復頻率較低的脈沖雷達里具有較好的應用前景。
1 數學模型
線性調頻脈沖是現代雷達常用的一種發射信號形式,其基帶信號的復數形式為

(1)

雷達信號在空間內傳播,被目標反射后到達雷達接收端。因此,雷達接收到的目標回波可以寫為
(2)
式中,r(t)為在t時刻雷達與目標散射點之間的徑向距離,fc為載波中心頻率,c為光速,z=A· exp(jθ)為未知的目標復散射系數,u(t)為復加性高斯白噪聲。由于本文討論的是低重頻雷達,雷達信號的脈沖寬度遠小于脈沖重復間隔(PRI),因此可以采用走停模型描述回波信號,即認為目標相對于雷達的運動在脈內可以忽略不計,而僅考慮脈間目標相對于雷達運動所產生的時延。因此,可以將回波信號中的瞬時往返時延2r(t)/c近似替換為脈間的往返時延τm。在一個相參處理間隔(CPI)內,假設目標作勻速直線運動,那么第m個脈沖的往返時延可以表示為
(3)
式中,tm=mTr為慢時間,Tr為脈沖重復間隔PRI的時間寬度,r0和v0分別為t=0時刻目標相對于雷達的徑向距離和速度。當目標沿著徑向遠離雷達時v0為正,靠近雷達時v0為負。將式(2)中的2r(t)/c替換為τm,得到走停模型下的基帶回波信號:

(4)
對基帶回波的時域信號作傅里葉變換,可以推出回波信號的頻域表達式:

(5)

對基帶回波信號進行匹配濾波就可以實現脈沖壓縮,并且匹配濾波器的傳輸函數是發射信號的脈沖包絡的共軛。因此,在頻域上對基帶回波信號進行匹配濾波,實現如下:
YPC(f)=Srb(f)S*(f)
(6)
將式(5)代入式(6)中,得到
(7)
Yk,m=zexp(-j2π(fc+kΔf)τm)+Uk,m
(8)
式中,k=-K,…0,…K為頻域上信號帶寬內的采樣點,Δf=γΔt為頻域采樣步長,每個脈沖的帶寬B0=(2K+1)Δf,m=-M,…0,…,M為一個CPI內的積累脈沖序號,積累脈沖數Np=2M+1。經過匹配濾波器(線性濾波器)后的噪聲項Uk,m仍然可以近似為復加性高斯白噪聲,設它的方差為σ2。為了方便下文仿真分析,這里先定義輸入信噪比為脈沖壓縮后的頻域數字信號的信噪比,即

(9)
利用多個相參脈沖回波可以構造目標的距離-速度模糊函數,從中可以得到目標的運動參數信息。接下來首先給出距離-速度二維模糊函數的構造方法,隨后分析速度維模糊分析的特性,由此推導出一種快速速度粗估計方法。
2 速度維似然函數分析
由式(8)可知,樣本Yk,m服從均值為z· exp(-j2π(fc+kΔf)τm)、方差為σ2的復高斯分布,其概率密度分布為
p(Yk,m;z,r,v)=
(10)
由于不同樣本間滿足相互獨立的條件,因此對所有樣本求取似然函數,得到

(11)
進一步求得對數似然函數
lnL(z,r,v)=-(2K+1)(2M+1)ln(πσ2)-
(12)
求解上式的最大值,得到目標運動參數的最大似然估計:

exp(j2π(fc+kΔf)τm(r,v))|
(13)
因此,具體在求取目標運動參數的最大似然估計時,需要在可能的參數空間內對目標的徑向距離和速度進行聯合搜索。理論上,在滿足樣本數足夠多且搜索步長足夠小的條件下,通過最大似然估計就能達到參數估計的克拉美-羅限,即實現理論上的最優估計。
為了分析速度模糊現象并引出本文算法,這里另外定義r,v的似然函數:
(14)
將Yk,m中的信號復散射系數z置為1,噪聲項Uk,m置為0后代入上式,得到
H(r,v)=
(15)
注意到r0,v0只是決定了H(r,v)在距離維和速度維上的中心位置。為了分析方便,將r0,v0置為0,將H(r,v)的中心位置設在原點,最終得到了只與r,v有關的似然函數表達式:
(16)
取r≡0代入上式,得到速度維似然函數:

(17)
上式中的函數G定義為

(18)
函數G在絕對值符號內是一個周期性的sinc函數,其周期大小為2π且在γ=2nπ(n為任意整數)處周期性地出現峰值。
為了直觀地觀察展示速度維似然函數分布,這里給出一組典型的雷達參數:載波中心頻率fc=3 GHz、帶寬B=5 MHz、采樣頻率fs=10 MHz、脈寬T=25 μs、脈沖重復頻率fr=300 Hz以及積累脈沖數Np=33。圖1 (a)為速度真值所在的無模糊范圍內的速度維似然函數分布,它接近sinc包絡。而從大范圍進行觀察時,速度維似然函數會周期性地出現峰值(除速度真值對應的主峰之外的峰稱為盲速旁瓣),如圖1 (b)所示,各峰值之間的間隔即為最大無模糊周期,并且各個峰值形成了巨大的外包絡。從整體上看,構成外包絡的局部小峰值隨著速度與真值的偏移呈現衰減趨勢。
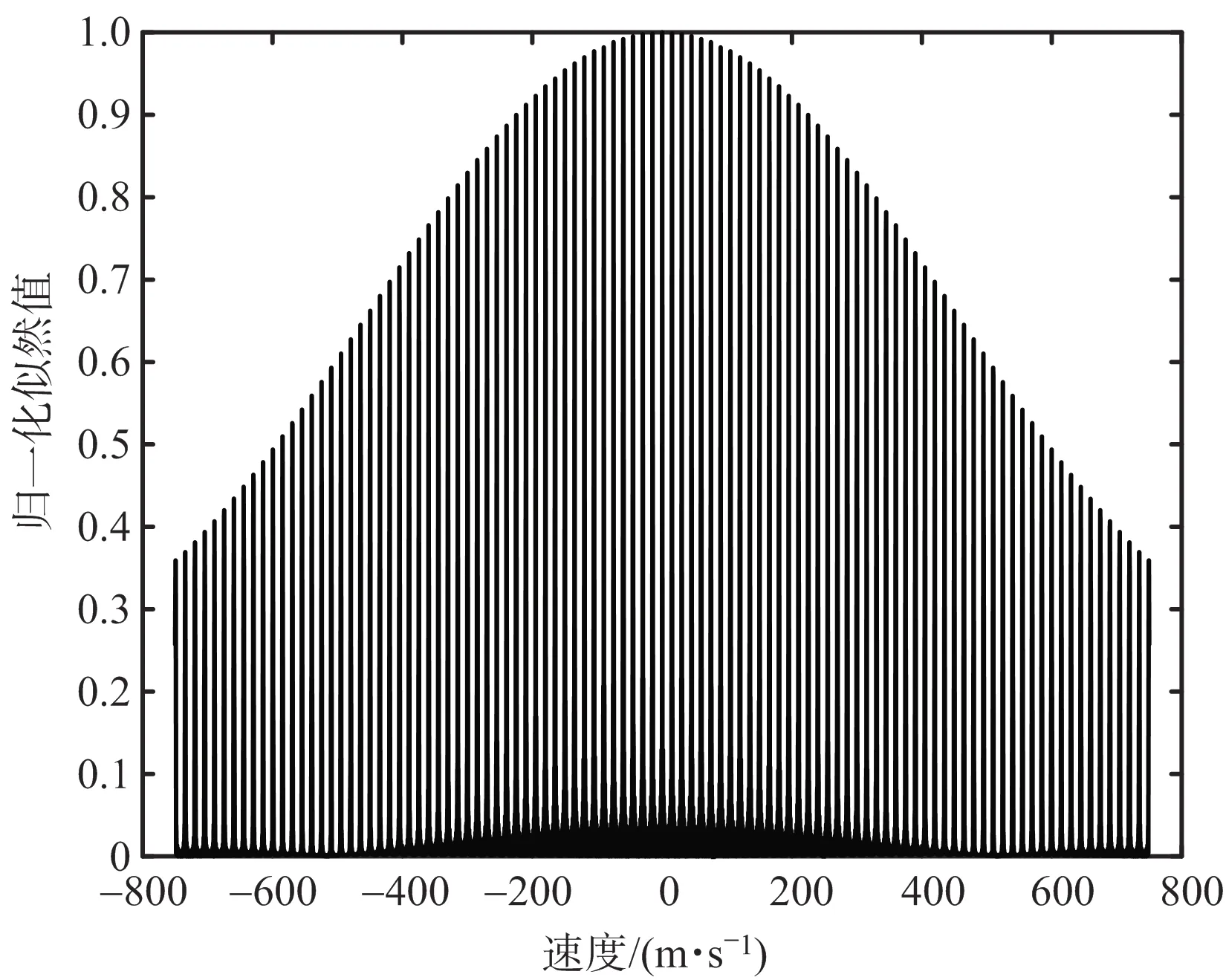
(b) 整體
由于式(17)的表達式過于復雜,不便于進行定量分析,因此需要繼續對式(17)進行化簡分析。假設
(19)

(20)
按照前面對函數G的討論,可以得到函數W(v)的周期為
(21)
可以看到,式(21)的具體值與m有關。而函數U(v)的周期為

(22)
假設v為vu的整數倍,即v=Nvu,N為整數,此時有

exp(2π×N)=1
(23)
將式(23)代入式(17)可以得到外包絡分布函數:

(24)
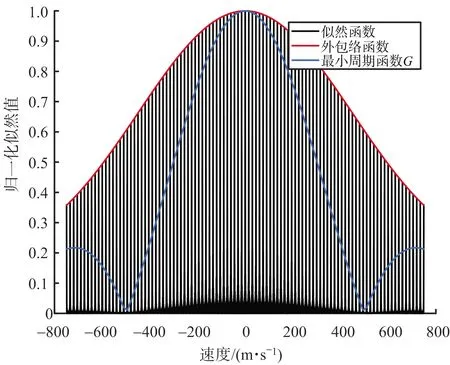
圖2 外包絡函數、似然函數和最小周期函數G對比

從速度維模糊函數可以看出,其外包絡在速度真值兩邊隨著速度值與真值的差單調減小。由此,可以根據這個特性進行目標速度的估計。
3 準最大似然速度粗估計
按照前面對速度維似然函數分布的分析,一種比較簡單、直接的解速度模糊思路是:以獲得的目標速度估計值作為初始值,設定vs作為步長,大范圍地求取速度維似然函數外包絡上的各峰值,最后搜索最高峰所在的位置。但是在圖1 (b)的情形下,在真值附近范圍的外包絡過于平緩,并不存在一個突出的峰值,容易受到噪聲影響,因此最終搜索到的不一定是速度真值。


(25)

(26)


(27)
(28)

(29)

4 仿真及分析
由于前面給出的解速度模糊算法需要對給定雷達參數的速度維似然函數進行具體分析,為了方便討論,這里使用表1中的B組雷達參數下進行仿真實驗與分析。同時,目標運動參數設為r0=100 km,v0=2 000 m/s。假設距離跟蹤數據的微分值與目標真實速度相差較大,為vc=2 100 m/s。
無模糊范圍間隔數n是本算法的關鍵參數。但是,目前并沒有給出關于間隔數n的合適選值,這里將n設為整數10,20…50,進行5組仿真實驗。為了研究噪聲和間隔數n對算法精度的影響,在各組仿真中設置輸入信噪比-10~5 dB,步長1 dB,每個信噪比下進行1 000次蒙特卡羅仿真。最終得到在給定的具體雷達參數下,本節所提出算法的速度估計值均方根誤差與輸入信噪比之間的關系如圖3所示。如果算法得到的速度估計值落在以速度真值v0為中心的無模糊范圍內,即認為正確解模糊;反之,則得到錯誤的解模糊結果。解模糊的正確率也是評判算法的標準之一。同樣地,設置輸入信噪比-10~5 dB,步長1 dB,每個信噪比下進行1 000次蒙特卡羅仿真。可以得到算法的解模糊正確率與輸入信噪比之間的關系如圖4所示。
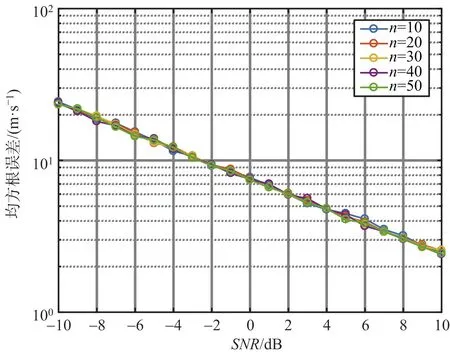
圖3 速度估計值均方根誤差與間隔數及輸入信噪比之間的關系
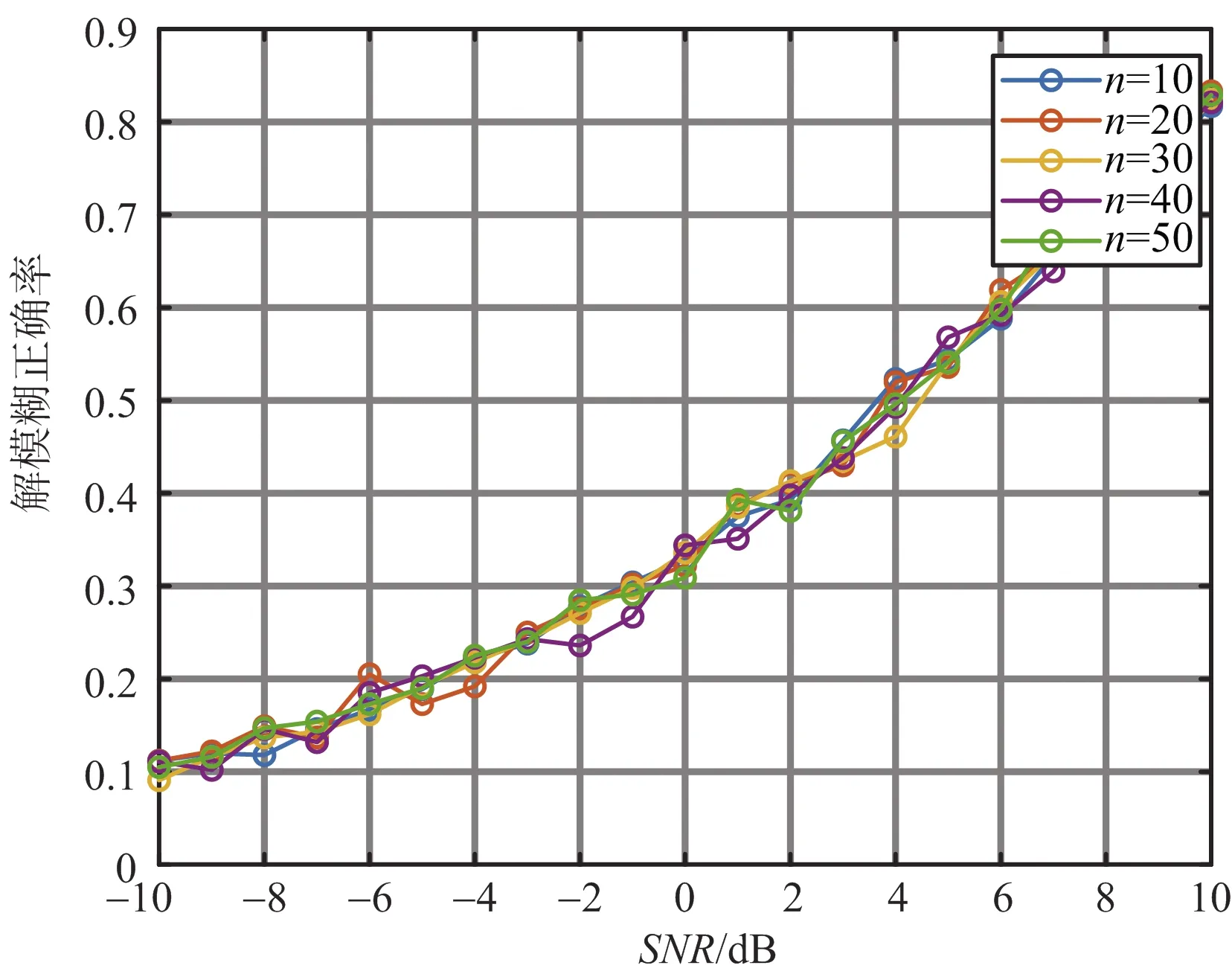
圖4 解模糊正確率與間隔數及輸入信噪比之間的關系

n∈Z+
(30)
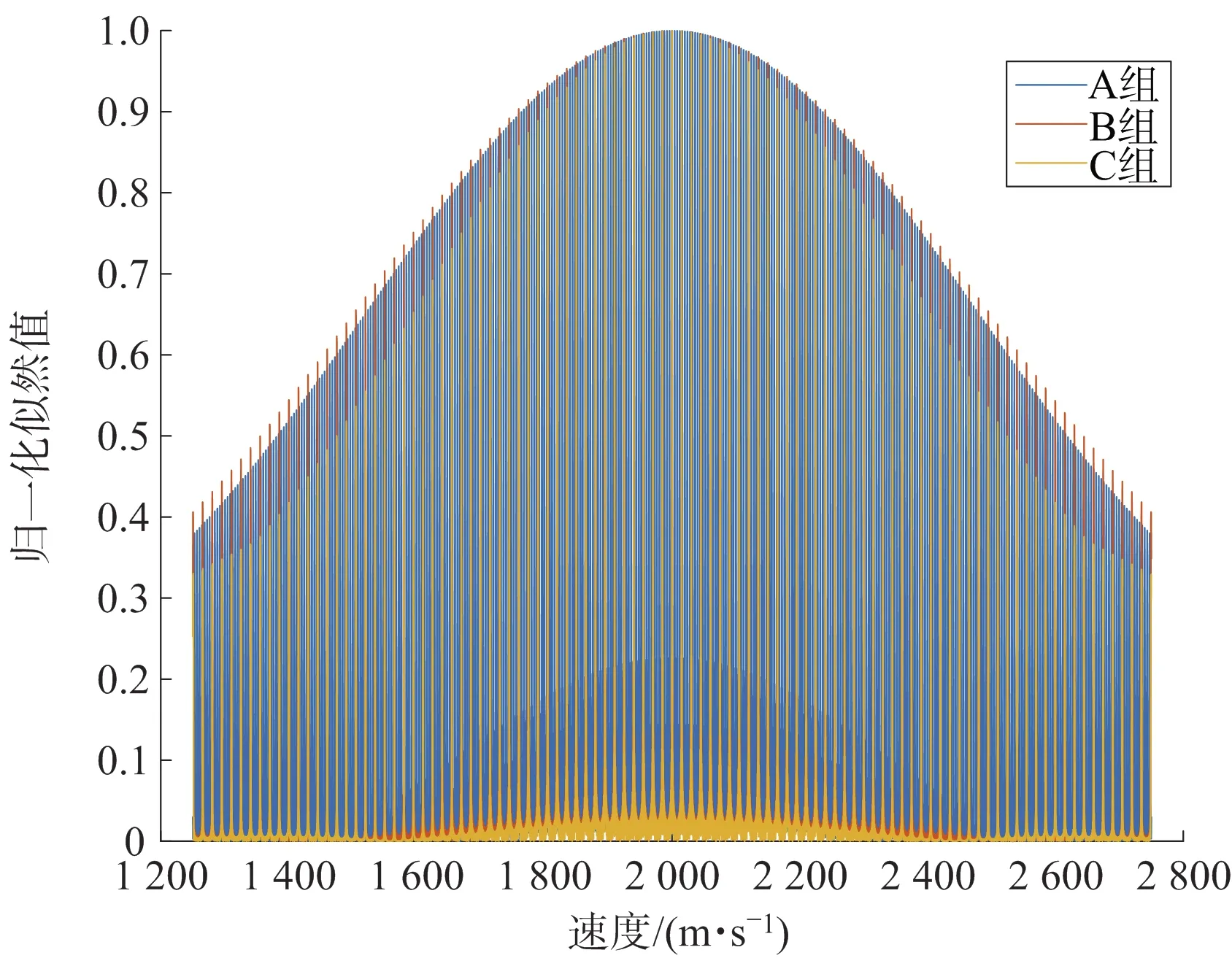
本文提出的算法依賴于速度維似然函數分布的特性,因此本節還將討論雷達參數對速度維似然函數分布的特性的影響。這里選取表1中3組雷達仿真參數進行仿真分析。如圖5所示,A組參數與B組參數的外包絡主瓣寬度接近,C組參數外包絡主瓣寬度較小。另外,可以看到B組參數與C組參數的無模糊周期一樣,而A組參數峰值更為密集。

表1 雷達仿真參數

(a) 局部
(b) 整體
圖6 A組、B組和C組雷達仿真參數下均方根誤差對比

圖7 A組、B組和C組雷達仿真參數下解模糊正確率對比
5 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06