蝴蝶形光纖傳感器撓度監測方法研究
2020-06-07 08:33:34裴輝輝
工程與建設 2020年6期
裴輝輝
(合肥工業大學 土木與水利工程學院,安徽 合肥 230009)
0 引 言
撓度作為最能夠反映橋梁受力情況、評估橋梁質量、分析橋梁潛在問題的重要參數之一,無論是在施工階段還是運營過程中,都是監測的重點。研究適用于橋梁撓度的長期實時監測系統,對橋梁動態撓度變化進行長期實時監測,以避免發生具有漸變性質的重大安全事故,同時為橋梁的日常管理養護提供參考和依據,具有重要的工程實用價值。
目前常用的撓度監測方法有水準儀法[1]、GPS法[2]、光電成像法[3]、連通管法[4]等。水準儀法是利用水準儀和水準尺來測量,根據水準儀前后兩次讀數的差值求得兩點間的高差。該方法設備安裝較為復雜、受氣流和車輛振動影響較大。GPS法是利用全球定位系統對橋梁的線形進行監測,定位速度快精度高,但是成本較高,僅適用于特大型橋梁。光電成像法是利用測點上的激光發射器與參考點的接受器之間的相對位移感知橋梁撓度變化,該方法測量精度易受惡劣氣候環境的影響,設備成本較高。連通管法是利用連通管原理,將橋梁撓度的變化轉化為連通管內液體高度的變化。該方法單獨使用較為困難,需要與其他傳感器結合使用,結構復雜且造價昂貴,不便于推廣。
結合現有撓度監測方法的不足,研究者提出了基于強度調制原理[5]的蝴蝶形塑料光纖位移傳感器撓度監測方法。該傳感器的傳感元件如圖1所示,當蝴蝶形光纖位置固定而G點發生位移時,蝴蝶形光纖的幾何形狀將隨之發生改變,進而導致光纖出射端光功率的變化。因此,本傳感元件通過對蝴蝶形光纖幾何形狀變化引起的光功率損耗進行調制,使G點位移與蝴蝶形光纖光功率損耗一一對應,以此實現對待測點位移的連續自動測量[6-8]。

圖1 蝴蝶形光纖位移傳感器的傳感元件示意圖
為滿足撓度監測系統的可靠性、耐久性、精確度等要求,同時降低監測方案的造價,便于傳感器加工安裝,本文嘗試采用韌性、穩定性以及靈敏度都十分優異的塑料光纖作為傳感元件[9],研發基于強度調制原理的蝴蝶形位移傳感器撓度監測系統。該系統不僅能為橋梁撓度的長期自動、多點同步測量提供一種簡單易行、穩定可靠且成本較低的解決方案,同時也是基于全橋結構健康監測系統的重要組成部分,具有十分重要的工程實用價值和學術研究意義。
1 蝴蝶形光纖傳感元件
1.1 傳感原理
通常,未經處理的光纖的靈敏度不足以檢測結構彎曲的變形。為了提高光纖對曲率的敏感度,將傳感區域光纖纏繞成蝴蝶結形狀。蝴蝶形光纖可以敏銳檢測到其幾何形狀變化導致的光功率損耗。本文作者正是利用這一特性,將蝴蝶形傳感元件作為彎曲調制結構,設計出完整的蝴蝶形光纖位移傳感器,如圖2所示。在傳感器中,光從光源發射,沿彎曲的蝴蝶形傳感元件傳輸。當外力作用于傳感元件引起G點下降時,將帶動傳感元件幾何形狀的縮小,同時將G點位移轉化為蝴蝶形光纖幾何形狀的改變,進而引起光纖出射端光功率的變化[10]。最后通過出射端連接的光功率計和計算機將光信號轉化為電信號并對電信號進行解析與保存。因此G點產生下降位移所引起的光功率損耗即為位移下降前后兩次光功率計記錄數據的差值,具體可表示為:
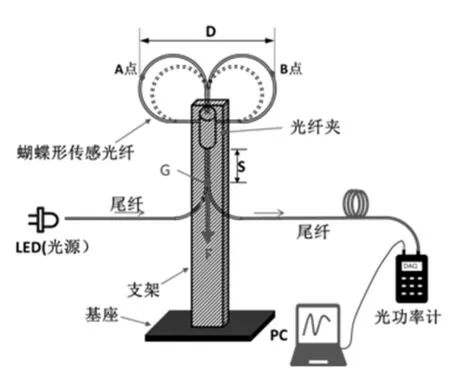
圖2 完整的蝴蝶形光纖位移傳感器示意圖
(1)
1.2 蝴蝶形光纖位移傳感器的傳感元件位移標定實驗
為了驗證所設計傳感器的可行性、穩定性,確定其的位移量程和精度,進行了傳感器的校準實驗。實驗過程中,將光纖纏繞成蝴蝶結形狀(D=12 cm),搭建光纖傳感鏈路,傳感元件通過POF尾纖連接到光源和光功率計。記傳感器初始寬度D=12 cm時為初始狀態,記錄初始狀態光功率計數值L0。沿圖示方向緩慢拉動G點處光纖向下移動增加位移S。G點每下降5 mm,記錄一次對應光功率數值,分別為L1、L2、L3…Li,直至傳感元件達到其最大位移(傳感元件形狀不能繼續縮小時)。操作過程中,位移每下降一次,靜置30 s待傳感器示數穩定后記錄光功率計數值。在上述操作完成后再上拉G點至初始狀態。同樣,G點每上升5 mm,記錄一次相應光功率值。位移的每次下降和上升構成一個完整的循環,重復操作3次。
按照下列公式,處理得到的數據:
(2)
其中,光功率損耗的單位為db,位移下降單位為mm。以3次上升和下降光功率損耗的平均值α作為縱坐標,位移變化S作為橫坐標,得到光纖下滑位移S和光功率損耗α之間的響應曲線。采用指數函數對實驗數據進行擬合,實驗結果如圖3所示。

圖3 傳感器位移與光功率損耗響應曲線
根據位移與光功率損耗之間的響應曲線可以看出,在傳感器位移范圍內(0~130 mm),蝴蝶形光纖傳感器的光功率損耗隨位移的上升(下降)而增加(減小),兩者呈指數級關系。實驗數據的擬合曲線解析式為:
αc=0.008 5·[EXP(0.036 116·S)-1]
(3)
擬合曲線相關系數R2越接近于1,說明擬合效果越好。因此,本次實驗擬合曲線的相關系數R2為0.998 97,說明該曲線可以作為蝴蝶形光纖位移傳感器的位移標定曲線。
2 蝴蝶形光纖傳感器撓度監測系統
根據上節位移標定實驗結果,可知傳感器的精度及穩定性主要取決于傳感元件的設計。本節將蝴蝶形光纖傳感元件應用于簡支梁撓度測量中,搭建一套結構簡單、制造方便、靈敏度高、支持遠程傳輸的蝴蝶形光纖傳感器撓度監測系統應用于簡支梁撓度監測中,為橋梁撓度的長期自動、多點同步測量提供一種簡單易行、穩定可靠且成本較低的解決方案。
2.1 蝴蝶形塑料光纖位移傳感器撓度監測系統的搭建
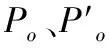
如圖4所示,使用強度較高的鋁合金簡支梁模擬橋梁撓度變化。在實驗裝置搭建過程中,將長3 m的簡支梁架在2個簡易支座上,分別在簡支梁的L/4、L/2和3L/4處搭建3個蝴蝶形光纖位移傳感器組成撓度監測系統。傳感器緊貼簡支梁邊緣放置,使用502膠水將G點處光纖與簡支梁連接在一起。作為實驗結果的對比,將直線位移傳感器(LVDT)緊貼安裝在簡支梁底部,接通光源、光功率計、計算機等實驗設備。
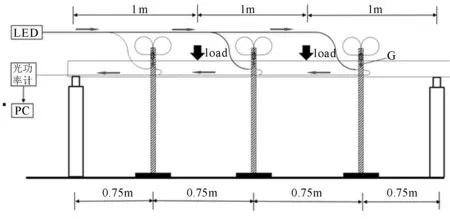
圖4 簡支梁撓度測量實驗示意圖
2.2 撓度測量實驗及結果
實驗加載過程中,分別在簡支梁L/3和2L/3處增加荷載。本實驗選擇規格為2 kg的標準砝碼按照每級2×2 kg在簡支梁L/3和2L/3處對稱逐級加載,荷載等級一共14級,從2×2 kg~2×28 kg依次增加砝碼。每次加載完成靜置30 s待傳感器示數穩定后再記錄加載等級、簡支梁撓度、光功率計示數等數據。加載完成后再按照同樣程序逐級卸載直至荷載為零。加載和卸載2個階段構成1個完整的測量周期。為減小誤差,共進行3個周期的撓度測量實驗,取3個周期實驗數據的平均值作為待測點撓度數據輸出。實驗結果見表1。
表1 三個測點撓度測量結果對比
由表1中簡支梁撓度監測實驗數據的對比可以看出:隨著荷載等級的增加,根據蝴蝶形光纖傳感器的輸出光功率損耗得出的計算撓度與LVDT測量的實際撓度基本一致。加載過程中,在簡支梁L/4、L/2和3L/4位置的3個待測點上,計算撓度與實際撓度之間的誤差均較小,絕對誤差小于1.5 mm,最大相對誤差僅為3.64%。進一步分析可知,L/2處測量結果的平均誤差為1.32%,小于其他2個測點平均誤差(L/4和3L/4處平均誤差分別為1.52%和1.51%)。這可能是由于撓度變形時,簡支梁跨中測點除撓度外無轉角產生,而其他兩個測點產生轉角影響了測量精度。經過深入分析認為,邊跨測點誤差較大的問題可以通過優化傳感器與簡支梁的接觸方式加以解決。
3 分析與結論
擾度是橋梁質量鑒定和健康安全狀態評估的重要考核指標,它直接反應橋梁的整體剛度、承載能力和整體穩定性。因此,合適的撓度監測方法對完善橋梁結構健康監測系統具有十分重要的意義。本文研發的蝴蝶形光纖位移傳感器撓度監測系統可以不受橋梁現場的塵埃、霧氣、濕度以及橋梁下部水位和交通情況等周圍環境的影響,適用于各種橋型的撓度測量,且無須額外參考點、安裝簡單、造價低。在簡支梁撓度測量實驗中,撓度監測結果與實際撓度發展趨勢基本一致,該系統測量誤差為mm級,相對誤差控制在4%以內,能夠滿足橋梁工程撓度測量的要求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
中國公路(2017年11期)2017-07-31 17:56:30
中國公路(2017年10期)2017-07-21 14:02:37
山東工業技術(2016年15期)2016-12-01 05:31:04
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
