基于多源遙感影像的海上溢油監測處理系統
2020-06-08 04:45:58陳彤彤許鳳至李建偉
船海工程 2020年2期
陳彤彤,許鳳至,李建偉
(1.煙臺海事局,山東 煙臺 264000;2.北海航海保障中心煙臺通信中心,山東 煙臺 264000;3.中海石油環保服務(天津)有限公司,天津 300457)
隨著我國水運行業的迅速發展,海上活動日益頻繁,加大了海上交通事故和溢油事故的發生風險,對海洋生態環境和沿岸經濟的發展造成了重大的影響,溢油事故的實時監測是降低溢油污染風險,提高溢油應急響應能力的有效方法[1]。
目前基于遙感影像進行海上事故監測大多還使用人工處理的操作,處理速度相對緩慢,缺乏高效的綜合信息處理系統支撐平臺,分析結果的內容和表現形式也相對單一,為決策部門提供技術支持時存在局限性。近年來已經開展了一系列海上溢油監測技術研究[2],但是現有的系統大都僅使用了SAR影像數據,很少涉及到資源更加豐富的光學影像,而且對于海上目標的監測僅涉及溢油區域的監測[3],存在監測目標單一、數據種類少等問題,不能夠滿足海上資源監測實時迅速的要求。
1 系統架構
本文基于C/S的系統架構,結合光學和雷達影像,針對船舶、敏感資源(海冰、養殖區)、溢油等多種海上目標,設計了包含數據管理、影像預處理、自動化監測、報表制作和管理的海上溢油監測處理系統(見圖1),可以滿足海上多種資源實時快速監測的需求。整體架構分為業務層、服務層、數據層。應用層提供地圖瀏覽、影像處理、圖斑管理、專題制圖、報表生成、歸檔管理等功能,邏輯層主要提供海上目標的自動識別功能,數據層主要是用來存儲原始影像、處理后影像、圖斑、報表、AIS數據等數據庫。

圖1 遙感溢油監測處理系統架構
2 關鍵技術
2.1 影像預處理
2.1.1 光學影像
光學傳感器影像可以提供多光譜影像,提供地表真實圖像,同時還可以提供近紅、短多紅外等波段為海上目標的監測提供更多的信息。系統中支持多種光學傳感器,包括landsat-8、Sentinel-2、GF-1、GF-2、ZY-3、MODIS、Pleiades等影像(見表1),分辨率范圍0.5~1 000 m,時間分辨率范圍1~16 d,通過集成多種傳感器影像,可以支持短周期不同場景下的海上目標監測需求。

表1 光學影像產品參數表
2.1.2 SAR影像
合成孔徑雷達影像相對于光學影像具有穿云透雨、全天時、全天候的工作能力,并且可以在夜間工作,具有大范圍目標探測、工作方式靈活、能夠適應惡劣天氣的優勢[4],尤其是溢油事故監測具有的時間和位置不確定的特性。系統集成了多種雷達影像,包括Radarsat-2、COSMO Skymed、GF-3、ENVISAT-ASAR、Terra SAR-X等,見表2。
2.1.3 影像預處理
系統內集成了針對上述影像的自動化預處理流程,包括格式轉換、幾何校正、正射校正、輻射定標、投影轉換、海陸分離、影像裁剪、去噪、拉伸、鑲嵌、融合等功能。影像預處理功能主要依靠GDAL庫實現,GDAL是一個在X/MIT許可協議下的開源柵格空間數據轉換庫。預處理算法主要采用C++實現,同時針對雷達影像成像過程中產生的幾何形變問題,需要對原始影像做地理編碼,這一過程采用IDL調用Sarscape地理編碼功能模塊實現[5]。

表2 SAR影像產品參數表
2.2 海上目標自動監測
針對船舶、海冰、養殖區、溢油等4類海上目標,實現了多種自動化提取方法,包括恒虛警率算法、faster r-cnn算法、自動化閾值算法、Unet算法。實現從原始數據到預處理、目標識別、特征信息計算的全自動化過程。
2.2.1 海上船舶的自動提取
恒虛警率(CFAR)是船舶提取的主流算法(見圖2),算法原理簡單,易于實現,對于簡單海況上的船舶識別有較高的精度,但是在高海況海域中,該算法易受海雜波、海島的影響,同時進行CFAR識別之前還需要進行海陸分離操作,因此,系統中還集成了基于faster r-cnn框架的深度學習算法,通過引入不同環境下的樣本,實現海上船舶的自動提取。
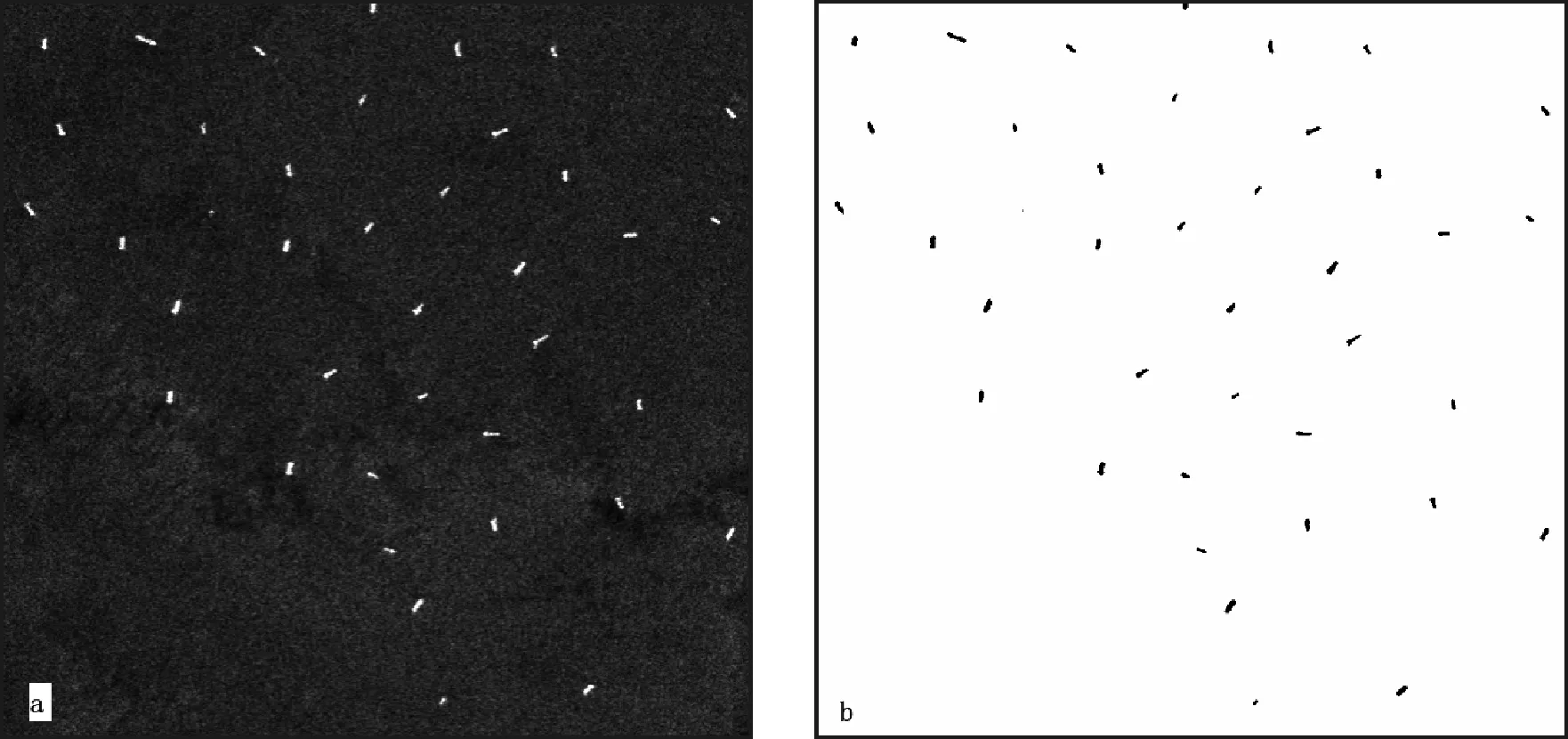
圖2 基于CFAR算法的船舶提取
2.2.2 海上敏感資源的自動提取
遼東灣是我國緯度最高、冰情最重的海區,周邊沿海地區是我國重要的經濟開發區。海冰已成為遼東灣海域海上工程設計、航運和開發生產中必須考慮的重要環境要素。系統中分別針對雷達和光學影像集成了基于紋理的雷達影像、基于自適應閾值算法的光學影像海冰自動提取功能,見圖3、4。

圖3 基于landsat-8影像的海冰提取
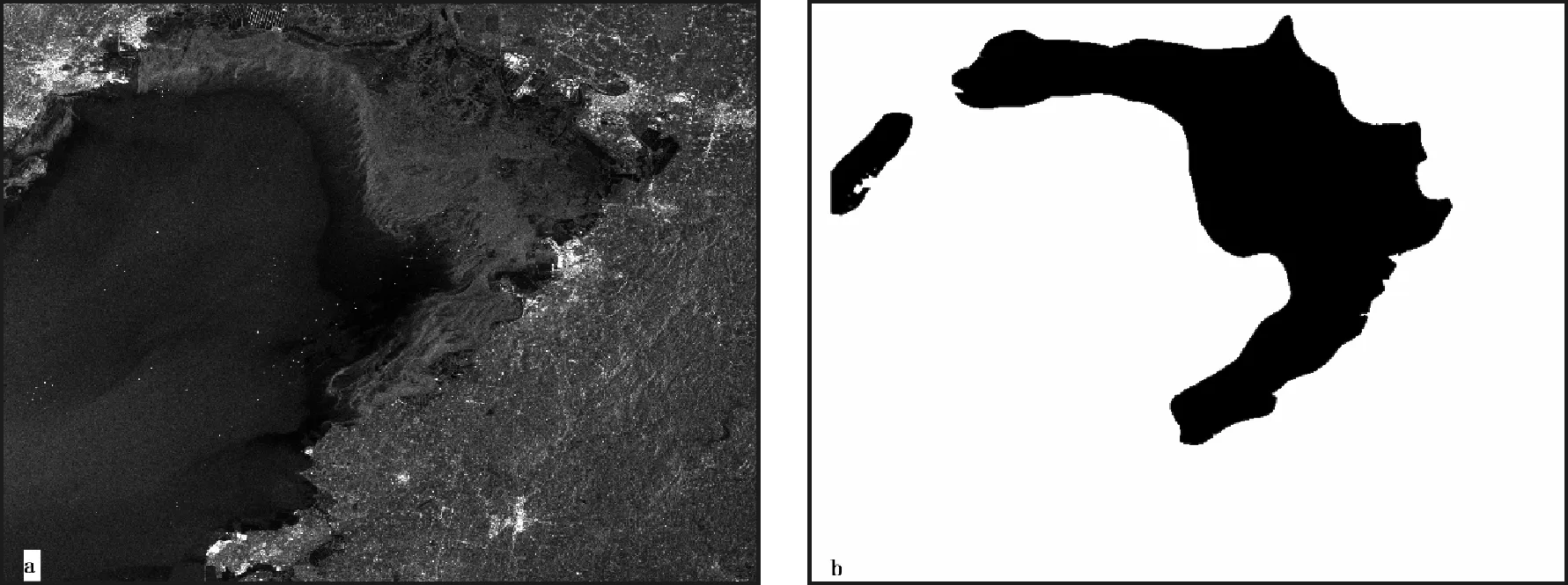
圖4 基于Radarsat-2影像的海冰提取
利用遙感圖像快速提取養殖區范圍(見圖5),可以幫助養殖場選址、決定養殖區品種、開展養殖區密度、養殖水體監測;同時結合GIS技術,還可以對養殖區進行規劃和管理,評估水產養殖區對環境的影響。系統中使用Unet深度學習框架,通過人工構架養殖區樣本,訓練養殖區分割模型,實現了對海上養殖區的自動化提取。

圖5 基于Radarsat-2影像的海上養殖區提取
2.2.3 海上溢油自動提取
海上溢油事故監測是系統中的主要模塊,系統集成了單極化SAR溢油自動識別算法,主要分為3個步驟:暗目標提取;暗目標特征提取;油膜與疑似油膜分類,通過構建大量的樣本庫對溢油區域進行識別。海上溢油提取結果見圖6。

圖6 海上溢油提取結果
3 系統實現
系統采用了C/S框架,以GIS和遙感技術為基礎,采用C#語言,基于Arcgis Engine10.0嵌入式GIS組件庫,目標識別模塊采用C++和python語言,基于GDAL/OGR開源柵格/矢量控件數據轉換庫開發而成。系統包含地圖操作基本、自動化目標識別、圖斑管理、專題制圖、報表生成和歸檔管理等功能。
自動化目標識別是用戶加載影像后,可以實現一鍵海上目標的自動化識別,主要包括影像預處理、海陸分離、目標識別、目標特征信息(中心坐標、面積、周長、時間)等4個過程。
專題圖制模塊用于制作溢油監測報表中所需的溢油圖斑專題圖、海冰圖斑專題圖、養殖區圖斑專題、船舶圖斑專題圖。具體包括鷹眼圖圖層管理、制圖范圍顯示、導出圖片、專題圖圖層管理、圖斑整飾、圖斑制圖處理。用戶可以根據實際需求執行設置排版操作、選擇紙張類型、比例尺、添加注記、線段、顯示符號等操作。
報表生成根據報表模板自動生成溢油監測、養殖區監測、船舶監測、海冰監測報表。主要功能包括文字填寫、插入鷹眼圖與專題圖、導出word或PDF等。
對使用系統的原始影像、預處理成果影像、監測產生的結果進行建庫和管理。包括:監測報告查詢、海上目標圖斑管理、原始影像管理、處理結果影像管理。
4 結論
基于多源遙感影像的海上溢油監測處理系統通過遙感圖像處理技術和深度學習算法,實現了海上目標的實時監測,解決了傳統的人工操作效率低下的問題。與現有的海上溢油監測系統相比,本系統除SAR影像外,還支持了國內外多種光學影像。除溢油監測外,還針對海上交通集成了船舶、海冰、養殖區的自動化監測,提升了系統對海上資源多元化的監測能力,能夠為國家海事部門提供高質量的溢油業務化監測服務。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
海洋通報(2021年3期)2021-08-14 02:20:38
成都信息工程大學學報(2021年2期)2021-07-22 07:23:32
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子技術與軟件工程(2016年24期)2017-02-23 19:13:41
中國學術期刊文摘(2016年8期)2016-02-13 13:04:44
