基于船載衛(wèi)星通信三軸天線的跟蹤搜索技術(shù)*
2020-06-08 10:08:58馬吉文米青超郭云玲楊亞軍
通信技術(shù) 2020年5期
關(guān)鍵詞:信號(hào)
馬吉文,米青超,郭云玲,楊亞軍
(中國(guó)電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081)
0 引 言
船載天線廣泛應(yīng)用于衛(wèi)星通信、電子偵察以及信息對(duì)抗等領(lǐng)域,作為系統(tǒng)的前端完成各類信號(hào)的接收和發(fā)射。隨著船載衛(wèi)星通信的發(fā)展,衛(wèi)星頻率越來越高,波束越來越窄,對(duì)船載天線快速捕獲、搜索、跟蹤衛(wèi)星帶來了更大挑戰(zhàn)。一般的搜索方法搜索時(shí)間長(zhǎng)、捕獲困難,于是提出了一種新的搜索方法。
1 船載三軸天線系統(tǒng)
船載三軸天線系統(tǒng)[1]主要包括方位驅(qū)動(dòng)裝置、俯仰驅(qū)動(dòng)裝置、交叉驅(qū)動(dòng)裝置、極化驅(qū)動(dòng)裝置、限位保護(hù)裝置、慣性導(dǎo)航模塊、饋源網(wǎng)絡(luò)、跟蹤接收機(jī)和天線控制單元等,如圖1 所示。其中,方位軸安裝滑環(huán),可以實(shí)現(xiàn)360°多圈連續(xù)轉(zhuǎn)動(dòng)。
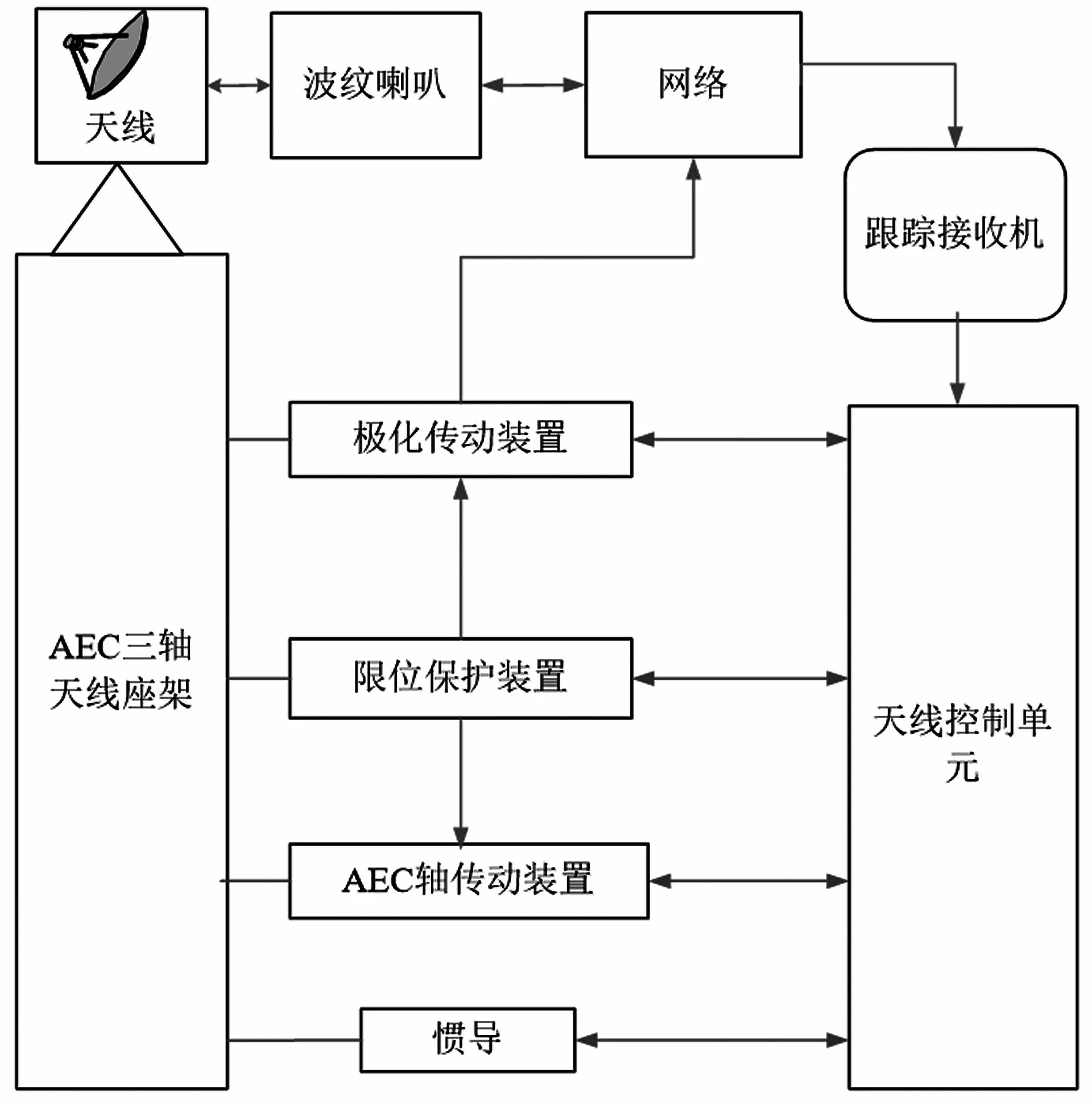
圖1 船載三軸天線系統(tǒng)組成
方位、俯仰、交叉、極化驅(qū)動(dòng)裝置主要負(fù)責(zé)各軸的轉(zhuǎn)動(dòng)控制和軸角測(cè)量。限位保護(hù)裝置保護(hù)天線各軸在合理范圍內(nèi)運(yùn)動(dòng)。慣性導(dǎo)航模塊[2]主要由MEMS 陀螺、加速度計(jì)和GPS 天線/北斗天線組成,對(duì)載體航向、縱搖角、橫搖角、經(jīng)度和緯度等信息敏感。饋源網(wǎng)絡(luò)完成微波信號(hào)的各種處理、傳輸?shù)取8櫧邮諜C(jī)[3]將饋源網(wǎng)絡(luò)處理后的信號(hào)經(jīng)過變頻、濾波、移相以及A/D 等處理,最終輸出信噪比、誤差電壓和鎖定信號(hào)等數(shù)字量。天線控制單元負(fù)責(zé)采集天線各設(shè)備狀態(tài)信息,實(shí)現(xiàn)伺服控制策略,控制天線自動(dòng)搜索目標(biāo)衛(wèi)星,實(shí)現(xiàn)對(duì)目標(biāo)衛(wèi)星的穩(wěn)定跟蹤。
2 跟蹤搜索算法
2.1 初始捕獲
首先,計(jì)算目標(biāo)衛(wèi)星的指向角度[4]。根據(jù)船載體經(jīng)度、緯度以及目標(biāo)衛(wèi)星的經(jīng)度,計(jì)算出方位指向角A和俯仰指向角E。
其中,方位地理角A為地理坐標(biāo)系中天線指向衛(wèi)星時(shí)的方位角度;俯仰地理角E為地理坐標(biāo)系中天線指向衛(wèi)星時(shí)的俯仰角度;衛(wèi)星經(jīng)度λ為地心坐標(biāo)系中同步衛(wèi)星的經(jīng)度;衛(wèi)星高度h為地心坐標(biāo)系中同步衛(wèi)星距地面的高度;衛(wèi)通站經(jīng)度λs為地理坐標(biāo)系中衛(wèi)通站的經(jīng)度;衛(wèi)通站經(jīng)度φs為地理坐標(biāo)系中衛(wèi)通站的緯度;Re為地球半徑。
然后,利用船載體的航向、橫搖角和縱搖角,通過地理坐標(biāo)系到載體坐標(biāo)系的坐標(biāo)變換[5],得到載體坐標(biāo)系中的方位目標(biāo)甲板角Aj、俯仰目標(biāo)甲板角Ej交叉目標(biāo)甲板角Cj。
其中,H為船的航向;R為船的橫搖角;P為船的縱搖角;Aj為天線的方位甲板角;Ej為天線的俯仰甲板角;Cj為天線的交叉甲板角。
在初始捕獲階段,根據(jù)計(jì)算得到的目標(biāo)甲板角Aj、俯仰目標(biāo)甲板角Ej交叉目標(biāo)甲板角Cj,天線控制單元控制天線各軸快速穩(wěn)定地轉(zhuǎn)動(dòng)到位。角度到位且待天線各軸穩(wěn)定后,轉(zhuǎn)入搜索階段。
2.2 搜 索
搜索策略的工作原理:以地理目標(biāo)角為中心,在設(shè)置的矩形空間范圍內(nèi),以規(guī)劃的速度在方位和俯仰兩個(gè)空間方向上逐步搜索;搜索范圍依次為搜索范圍1,搜索范圍2,搜索范圍3…,范圍逐漸縮小,如圖2 所示。天線控制單元控制天線在搜索范圍1 內(nèi)按照設(shè)置的方位速度和俯仰速度進(jìn)行搜索。在搜索過程中,判斷跟蹤接收機(jī)上報(bào)的預(yù)鎖定信號(hào)和鎖定信號(hào)是否為真,即天線是否搜索到目標(biāo)。若預(yù)鎖定信號(hào)和鎖定信號(hào)為真,則進(jìn)入搜索范圍2;搜索中心不變,但搜索范圍縮小并繼續(xù)搜索,以此類推。在搜索過程中,天線方位和俯仰在空間上合成鋸齒形狀的搜索軌跡。根據(jù)速度的大小設(shè)置不同,軌跡密度也不同。圖3 為搜索速度較大時(shí)的軌跡,圖4 為搜索速度較小時(shí)的軌跡。
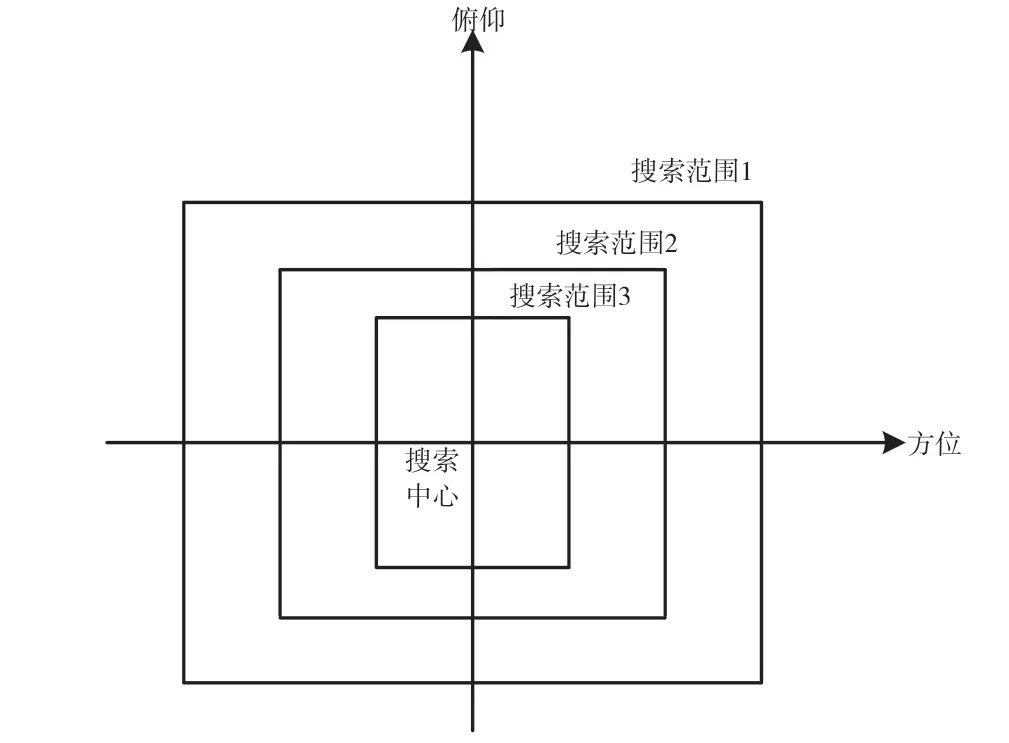
圖2 搜索范圍
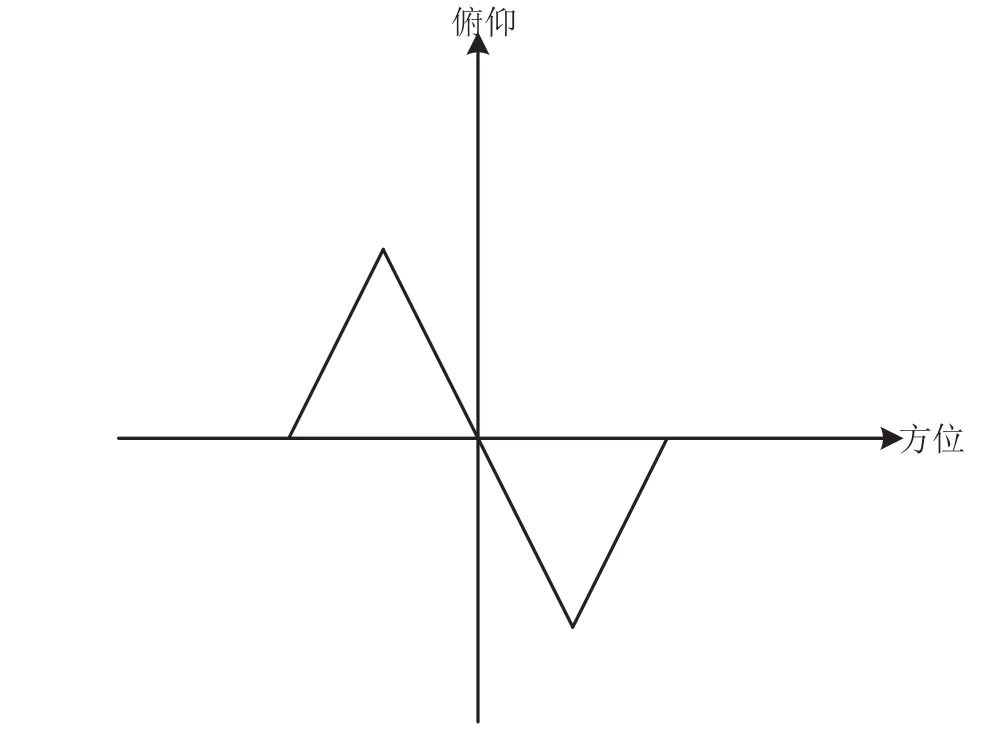
圖3 快速搜索時(shí)天線在空間的軌跡
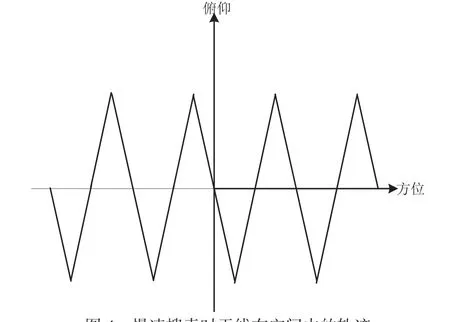
圖4 慢速搜索時(shí)天線在空間內(nèi)的軌跡
在搜索過程中,每個(gè)程序周期結(jié)束后。方位和俯仰在地理坐標(biāo)系中的偏移量分別為ΔA、ΔE,則新命令角度為中心角與搜索偏移量之和為(ΔCenter+ΔA, ΔCenter+ΔE)經(jīng)地理坐標(biāo)系到載體坐標(biāo)系的坐標(biāo)轉(zhuǎn)換,得到天線新的方位甲板角、俯仰甲板角和交叉甲板角。天線控制單元控制天線各軸快速穩(wěn)定地轉(zhuǎn)動(dòng)到位,完成一個(gè)程序周期的搜索。
船載三軸天線的跟蹤搜索具體流程如下。
第1 步:以目標(biāo)地理角為搜索中心,在設(shè)置的范圍內(nèi)搜索,搜索參數(shù)數(shù)組1,包括方位搜索范圍、俯仰搜索范圍、方位搜索速度以及俯仰搜索速度等。在搜索過程中,實(shí)時(shí)判斷跟蹤接收機(jī)預(yù)鎖信號(hào),預(yù)鎖定成功則轉(zhuǎn)入第3 步;在設(shè)置的范圍內(nèi)搜索結(jié)束且無預(yù)鎖信號(hào),則轉(zhuǎn)入第2 步。
第2 步:以目標(biāo)地理角為搜索中心,天線按照搜索參數(shù)2,在360°范圍內(nèi)進(jìn)行搜索。由于MEMS 慣導(dǎo)器件存在精度較差且航向漂移速度較快等缺點(diǎn),慣導(dǎo)上報(bào)的航向是不準(zhǔn)確的,因此天線有時(shí)需進(jìn)行大范圍搜索。在搜索過程中,實(shí)時(shí)判斷跟蹤接收機(jī)預(yù)鎖信號(hào),預(yù)鎖定成功則轉(zhuǎn)入第3 步;在設(shè)置的范圍內(nèi)搜索結(jié)束且無預(yù)鎖信號(hào),則連續(xù)搜索n次,n次搜索結(jié)束后仍無跟蹤接收機(jī)預(yù)鎖信號(hào),則搜索失敗,轉(zhuǎn)入第6 步。
第3 步:采用“對(duì)稱法”尋找信號(hào)最大點(diǎn)的位置,如圖5 所示,中心點(diǎn)A=(B+C)/2。以目標(biāo)地理角為中心,天線按照搜索參數(shù)3 進(jìn)行逐步搜索,粗找中心位置,并記憶中心角度和接收機(jī)信噪比;通過尋找“最大信號(hào)-2 dB”的左、右兩個(gè)位置,取平均值,精確確定中心位置并記憶中心角度;根據(jù)中心反推航向值,然后向捷聯(lián)慣導(dǎo)發(fā)送航向修訂命令,進(jìn)入第4 步。
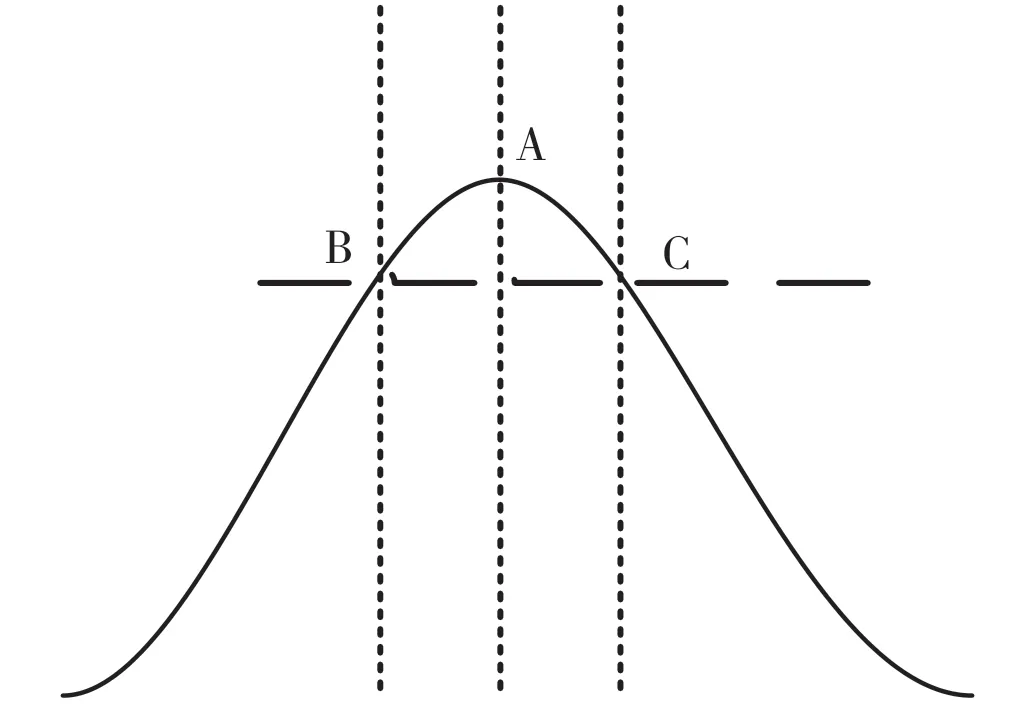
圖5 對(duì)稱法
第4 步:引導(dǎo)至信號(hào)最大值位置,并以此為搜索中心,按照搜索參數(shù)4 進(jìn)行精確搜索。同時(shí),記憶開始進(jìn)入該步時(shí)方位和俯仰的當(dāng)前地理角度、信噪比;搜索過程中,判斷是否滿足轉(zhuǎn)跟蹤的條件,即接收機(jī)鎖定且方位、俯仰誤差電壓同時(shí)小于Δ。若滿足跟蹤條件,則進(jìn)入第5 步;若搜索結(jié)束且不滿足跟蹤條件,則降低跟蹤門限后,繼續(xù)在該步搜索;如果降低跟蹤門限后搜索結(jié)束但仍不滿足跟蹤條件,則返回第1 步重新開始搜索。循環(huán)n次后,若一直未搜索到信號(hào)則搜索失敗,轉(zhuǎn)入第6 步。
第5 步:搜索成功后,轉(zhuǎn)入跟蹤。
第6 步:搜索失敗后,天線不再搜索,轉(zhuǎn)入待機(jī),并上報(bào)搜索失敗告警提示。
2.3 跟 蹤
在跟蹤過程中,跟蹤接收機(jī)提供的方位、俯仰誤差電壓作為環(huán)路反饋,天線控制單元控制天線朝著誤差電壓減小的方向運(yùn)動(dòng),通過不停調(diào)整保證方位、俯仰誤差電壓均在零附近,即天線時(shí)刻對(duì)準(zhǔn)目標(biāo)且誤差電壓越接近零,天線跟蹤目標(biāo)的精度越高。同時(shí),實(shí)時(shí)記憶中心角度,并根據(jù)當(dāng)前中心角度反推出航向,定時(shí)修正捷聯(lián)慣導(dǎo),消除慣導(dǎo)航向的零漂。
3 結(jié) 語
基于捷聯(lián)慣導(dǎo)的船載三軸天線跟蹤搜索技術(shù)可以實(shí)現(xiàn)對(duì)目標(biāo)衛(wèi)星的快速搜索跟蹤,搜索鎖定時(shí)間縮短為常規(guī)搜索時(shí)間的一半,解決了船載衛(wèi)通天線捕獲目標(biāo)衛(wèi)星時(shí)間長(zhǎng)的問題。目前,該跟蹤搜索技術(shù)已成功應(yīng)用于多種不同座架形式的船載天線,并且取得了良好的效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
