增程式電動汽車再生制動控制策略仿真研究
2020-06-08 10:06:09劉光隆蔡永明常健李德才李文亮
汽車科技 2020年3期
關鍵詞:控制策略
劉光隆 蔡永明 常健 李德才 李文亮


摘? 要:基于AVL Cruise軟件平臺,建立了增程式電動汽車的仿真模型和再生制動控制策略的控制模塊。對不同的控制策略進行了仿真對比分析,結果表明本文制定的控制策略可以較好的兼顧能量回收利用率和安全性,對實際工程設計具有一定的參考價值。
關鍵詞:增程式;電動汽車;再生制動;控制策略
中圖分類號:U469.72? ? ? 文獻標識碼:A? ? ?文章編號:1005-2550(2020)03-0022-05
Abstract: Based on the AVL cruise software platform, the simulation model and the control module of regenerative braking control strategy of range-extender electric vehicle are established. Different control strategies are simulated and analyzed. The results show that the control strategy proposed in this paper can give a good consideration to energy recovery and safety, it has certain reference value to the actual engineering design.
1? ? 前言
制動能量再生回收是電動汽車最重要的特點之一。在車輛制動時,動力傳動系統(tǒng)中的電機將汽車的制動能量轉換成電能,存儲在能量存儲單元中,從而顯著提高汽車的能量利用效率,降低車輛實際能耗。
本文基于AVL Cruise軟件平臺對一款增程式電動汽車進行整車建模,結合增程式電動汽車的動力系統(tǒng)特點,在滿足ECE制動法規(guī)要求的前提下,制定了一種再生制動能量回收控制策略,同時對控制策略進行了仿真對比分析。
2? ? 制動能量回收控制原則
在電動汽車中,車輛總制動力由機械摩擦制動力和電機再生制動力組成,而電機再生制動力只能作用在車輛驅動輪上。再生制動控制的目的就是解決前后制動力的分配和驅動輪上電機再生制動力與機械制動力的分配問題。再生制動控制策略的制定將直接影響車輛制動能量回收效果和制動時的車輛安全性。針對這種混合制動系統(tǒng),再生制動控制策略的設計既要保證汽車的安全性又要盡可能多的回收制動能量。但是這兩個設計目標存在一定的矛盾性,所以再生制動控制策略的設計就是在這兩個目標之間找到一個合適的平衡點。增程式電動汽車的結構如圖1所示:
基于制動安全考慮,ECE法規(guī)對前后輪制動力分配有嚴格規(guī)定,在總制動力需求一定的情況下,只能在法規(guī)規(guī)定的范圍內(nèi)進行前后輪制動力的分配。基于能量回收最大化的原則,在法規(guī)允許范圍內(nèi)盡可能多的把制動力分配給驅動輪;在電機發(fā)電和電池充電功率的允許范圍內(nèi)盡可能多的把驅動輪的制動力分配給電機再生制動。
3? ? 制動能量回收控制策略
3.1? ?制動模式劃分
基于制動強度,通常把制動劃分為如下三種模式:
輕度制動:汽車在緩慢停車或者長下坡時,對制動力的要求不是很大,駕駛員只需輕踩制動踏板即可滿足要求,該工況為輕度制動工況,本文定義制動強度z<0.2時為輕度制動。由于在輕度制動時,法規(guī)對制動力分配系數(shù)沒有嚴格的限制,所以當車輛在輕度制動時,制動力可以完全由驅動輪提供。通過查閱文獻,國內(nèi)一般小轎車的制動強度門限值一般限制在0.15左右,所以為了能夠更多的回收制動能量,當車輛制動強度z<0.15時,整車制動力完全由驅動輪的再生制動提供。
正常制動:一般汽車在城市道路行駛遇到紅燈或行人需要減速或停車的工況,需要提供一個相對較大的制動力,該工況為正常制動工況,本文定義0.2≤z≤0.7為正常制動。該工況又分停車過程和減速過程,其中停車過程制動力完全由機械摩擦制動提供,減速過程以再生制動為主機械摩擦制動為輔。
緊急制動:當汽車行駛過程中遇到緊急情況,需要迅速減速或停車時,駕駛員通常會深踩制動踏板,該工況為緊急制動,本文定義z>0.7為緊急制動。在該工況下,由于制動時間短,強度大,從安全方面考慮,采用完全機械制動完成。
3.2? ?制動能量回收約束條件
在制定制動能量回收控制策略時,為了兼顧效率、安全、舒適和相關零部件的使用壽命,需要同時考慮一些約束條件。
動力電池的SOC狀態(tài):為了防止過充,當電池組SOC值達到設計允許的上限值時,為保護電池,延長電池的使用壽命,不進入再生制動。
動力電池的充電功率限制:為了保證電池安全,延長電池使用壽命,制動回收的功率不能超過電池的最大充電功率。
車速:當車速較低時,電機制動電動勢較小,能量難以回收,同時考慮制動安全性,不進入再生制動。
制動強度:當制動強度過大是,為了保證制動安全性,同時防止電機、電池瞬間充電功率過大,不進入再生制動。
電池溫度:當電池溫度達到設計的上限值時,不進入再生制動。
3.3? ?再生制動控制策略
車輛運行在增程模式時,增程器按相應的控制策略輸出功率,此時如果車輛進入再生制動模式,增程器和驅動電機將同時給電池充電,如果電機制動回收的功率很大時可能會導致充電功率過大,超過電池充電功率,所以在該工況下當制動回收的功率超過一定限制值時,增程器的發(fā)動機應轉入怠速工況,這樣既可以保護電池過充,又可以防止發(fā)動機頻繁啟停。
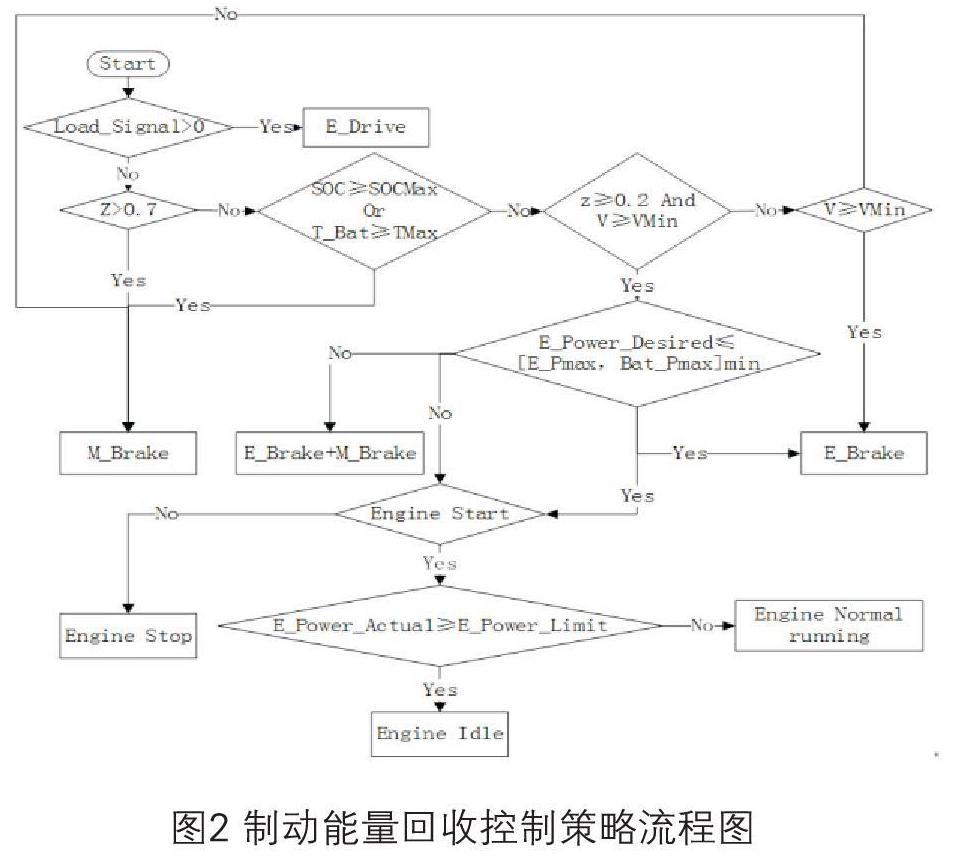
基于前文的制動模式劃分、制動能量回收的約束條件和增程模式下對相關硬件的保護,制定了本文的再生制動控制策略。
當制動強度Z>0.7時,車輛制動力完全由機械制動提供。
當電池電量SOC≥SOCMax或電池溫度T_Bat≥TMax時,車輛制動力完全由機械制動提供。
當車速V≤VMin時,車輛制動力完全由機械制動提供。
當制動強度0.2≤z<0.7和 V≥Vmin時;如果制動回收功率低于最大回收功率限制,車輛分配給驅動輪的制動力完全由再生制動提供;如果制動回收功率高于最大回收功率限制,車輛分配給驅動輪的制動力將由機械制動和再生制動共同提供。
當發(fā)動機工作,車輛再生制動大于設定限值時,發(fā)動機轉入怠速工況。
如圖2所示為制動能量回收控制策略流程圖。
4? ? 制動能量回收策略仿真分析
本文采用AVL Cruise對制動能量回收策略進行仿真分析,其中整車仿真模型在AVL Cruise軟件中搭建;制動能量回收控制模塊根據(jù)制定的控制策略自主搭建,通過生成的DLL文件與AVL Cruise模型形成無縫連接。
4.1? ?仿真模型
本文仿真模型搭建的關鍵在AVL Cruise的整車仿真模型與制動能量回收控制策略模塊之間的信號交互,這是模型搭建的重點。整車仿真模型如圖3所示:
在自主搭建制動能量回收控制器模塊時,為了最大限度的模擬實車狀態(tài),仿真控制策略應基于實車控制策略及相關信號進行搭建。基于前文制定的能量回收控制策略,制動能量回收的控制模型如圖4所示:
4.2? ?仿真結果與分析
基于前文建立的仿真和控制模型,進行了如下三個方面的仿真分析。
在制動強度小于0.15的輕度制動情況下,不同的前后輪制動力分配方案對制動能量回收的影響。
當車輛工作在增程模式下時,車輛進入制動能量回收模式,此時發(fā)動機維持原工作狀態(tài)和轉回怠速狀態(tài),對動力電池的影響。
當車速較低時,對制動能量回收的影響。
圖5是車輛以60Km/h速度勻速下坡時不同坡度與制動強度的關系曲線,從數(shù)據(jù)可以看出,坡度越大制動強度越大,當坡度達到10%時制動強度為0.07。由以上數(shù)據(jù)可以判斷當車輛在下坡工況正常行駛時,制動強度基本不會超過0.15。
圖6、圖7是車輛以60Km/h速度勻速下坡時制動力按例分配給前后輪和制動力100%由驅動輪提供兩種不同的制動力分配下,不同坡度的電機發(fā)電效率對比和電池充電功率對比;其中分配給驅動輪的制動力完全來自于電機再生制動。從數(shù)據(jù)對比可以看出當車輛制動力100%由驅動輪再生制動提供時,電機的發(fā)電效率和電池的充電功率都遠遠高于制動力按比例進行前后輪分配的策略。
由以上分析可以得出當制動強度小于0.15時,整車制動力完全由驅動輪的再生制動提供,這將大大提高制動能量的回收利用率。
如圖8所示為車輛增程模式下車速為60Km/h時進行制動能量回收,不同的發(fā)動機工作工況制動強度與充電功率關系對比。如果發(fā)動機工況點維持不變,則車輛制動能量回收時增程器和回收制動兩部分充電功率的疊加有可能會導致充電功率過高的情況,如圖所示,當制動強度為0.45時,充電功率達到了90Kw以上,但如果讓發(fā)動機轉入怠速工況只維持增程器的運行狀態(tài)而不再給電池充電,則充電功率會低很多。
所以在增程模式下當制動回收功率超過某一限值時,應控制發(fā)動機轉入怠速工況。這樣既可以防止由于兩方面充電功率的疊加可能導致的電池過充,同時也可以避免發(fā)動機的頻繁啟停。
圖9為在制動強度z=0.4時電機發(fā)電效率與車速的關系曲線。在同樣的制動強度下,隨著車速的降低,電機的發(fā)電效率逐漸減小,而且車速越低效率下降的速率越快,當車速低于一定值時,制動能量的回收率是非常低的。
圖10為車速為10Km/h時電池充電功率與制動強度關系曲線。當制動強度z=0.5時,充電功率也只有不到6Kw,而且隨著制動強度降低,該值越小。
結合圖9、圖10分析,當車速很低時,驅動電機的發(fā)電效率和電池的充電功率都非常低,能量難以回收,同時考慮低速停車制動的安全性,當車速低于某一限值時,車輛制動力完全由機械摩擦制動提供。
5? ? 結束語
電動汽車制動能量的回收策略直接決定了制動能量的回收率和車輛的制動安全性,本文利用AVL Cruise軟件平臺搭建了仿真模型和再生制動控制模型,對不同的回收策略進行了仿真對比分析,結果表明該策略可以較好的兼顧能量回收利用率和制動安全性,具有一定的可行性。同時利用本文仿真分析方法可以對實車制動能量回收控制策略制定提供參考和方向,具有一定的實際應用價值。
參考文獻:
[1]周倪青,陶小雨,杜金枝. 制動能量回收策略研究[J]. 科技創(chuàng)業(yè)月刊,2016(6): 109-111.
[2]陳泳丹,席軍強,陳慧巖. 單軸并聯(lián)式混合動力城市客車再生制動檔位決策[J]. 北京理工大學學報,2012(4): 370-376.
[3]張方強. 增程式電動汽車動力系統(tǒng)參數(shù)匹配與仿真研究[D]. 浙江大學,2017.
[4]翟志強,趙國柱,朱思洪. 電動汽車再生制動控制策略研究[J]. 計算機仿真,2013(11): 160-163.
[5]馮能蓮,么居標,俞黎明等. 電動汽車再生制動控制策略 [J]. 北京工業(yè)大學學報,2008(12): 1332-1338.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
