基于Workbench狂呼乘人加速度計算及束縛裝置選型
2020-06-09 07:23:52蘇曉峰趙九峰丁舟波李雁冰
機械 2020年5期
關鍵詞:方向
蘇曉峰,趙九峰*,,丁舟波,李雁冰
基于Workbench狂呼乘人加速度計算及束縛裝置選型
蘇曉峰1,趙九峰*,1,丁舟波2,李雁冰1
(1.河南省特種設備安全檢測研究院,河南 鄭州 450008;2.中原工學院 機電學院,河南 鄭州 450007)
以狂呼為例,給出了乘人加速度理論計算方法;并利用Workbench仿真軟件,進行狂呼動力學仿真分析,提取狂呼乘人加速度時間歷程曲線。與理論計算分析比較,仿真結果和理論計算結果非常接近,表明仿真計算結果的可靠性和正確性。通過對乘人加速度的計算,確定設計加速度的分區,指導乘人束縛裝置的選型。其計算方法和結果可為旋轉類游樂設施乘人加速度的計算和束縛裝置的設計選型提供參考,通過束縛裝置本體的可靠性來約束和控制游客的不安全行為,提高游樂設施的本質安全。
狂呼游藝機;加速度;束縛裝置;動力學;虛擬樣機;游樂設施
狂呼是一款大型觀覽車類游樂設備,乘人乘坐在中心對稱的兩個自由旋轉的座艙上,大臂在360°旋轉時,時而失重墜落,時而超重上升,同時座艙依靠離心力自由旋轉[1]。
游樂設施的動態設計,主要考慮機構的運動加速度不能超過人體的承受范圍。設備在運行過程中只要有加速度就會產生慣性力,加速度越大慣性力越大。乘人本身質量產生的慣性力會直接作用在乘人身上。慣性力超過一定限度就會對人身造成傷害,所以有必要規定加速度的允許值[2]。游樂設施采用的是加速度,與通常概念中的加速度有所不同,而標準中對加速度的分析和校核方法未加詳細說明,因而給加速度的分區帶來一定的困擾[3]。
本文在分析狂呼運行特點和載荷特性的基礎上,利用虛擬樣機技術建立狂呼整機的動力學模型,進行狂呼動力學仿真分析計算乘人加速度,并與傳統力學計算結果比較。通過對乘人加速度的計算,確定設計加速度的分區,并確定如何通過加速度的分區來指導乘人束縛裝置的選型。
1 乘人g加速度理論計算
1.1 人體坐標系
加速度是實際加速度與重力加速度的比值,游樂設施中的“實際加速度”和運動學中的加速度的大小和方向不同,運動學中的加速度為速度隨時間的變化率,是描述速度變化快慢的物理量,加速度是矢量,方向為速度變化的方向,與合外力方向相同。而游樂設施中的加速度實質上是慣性加速度,與慣性力(包括重力)方向一致,其大小包含重力加速度[3]。
為保證乘人不受傷害,游樂設施乘人的加速度應限制在一定的范圍內[4],歐盟、美國、澳大利亞標準中對此進行了詳細規定。如歐盟標準給出了加速度的定義,并給出了人體空間坐標系各個方向的加速度及合成加速度的限定范圍,且規定乘人束縛裝置須根據乘人加速度的分區進行選型[3]。GB 8408-2018《大型游樂設施安全規范》[4]引用歐盟加速度部分的規定。人體坐標系規定人體前后方向為軸,壓緊為正,拉開為負;體軀干頭腳之間方向為軸,壓緊為正,拉開為負。如圖1所示。
根據GB 8408-2018中圖3~圖5,確定向加速度a、向加速度a、組合加速度a/a的許用值,可判定乘人加速度是否符合GB 8408-2018要求。

圖1 人體坐標系示意圖
1.2 狂呼乘人加速度計算
狂呼游藝機如圖2所示,為固定式,由底板、立柱、回轉臂、座艙等部分組成;回轉臂通過機座與立柱連接,回轉臂中心是機座,有兩組驅動裝置,分別由電機、減速器、小齒輪、回轉支承進行減速驅動。游客坐在座艙上,設備頂部2臺電機驅動使回轉臂沿水平面作360°旋轉,同時座艙在離心力作用下自由旋轉。
座艙組件運動過程中,受到重力加速度和離心加速度的雙重作用,由于繞著水平軸旋轉,離心加速度方向背離中心水平軸,重力加速度方向始終向下。
座艙運行過程中的加速度如圖3所示,有:
式中:為離心加速度,m/s2;為狂呼回轉臂的半徑,=9.9 m;為回轉角速度,當回轉臂穩定運行時,=0.73 rad/s。
計算得:=5.3 m/s2
根據夾角公式,有:

可得:
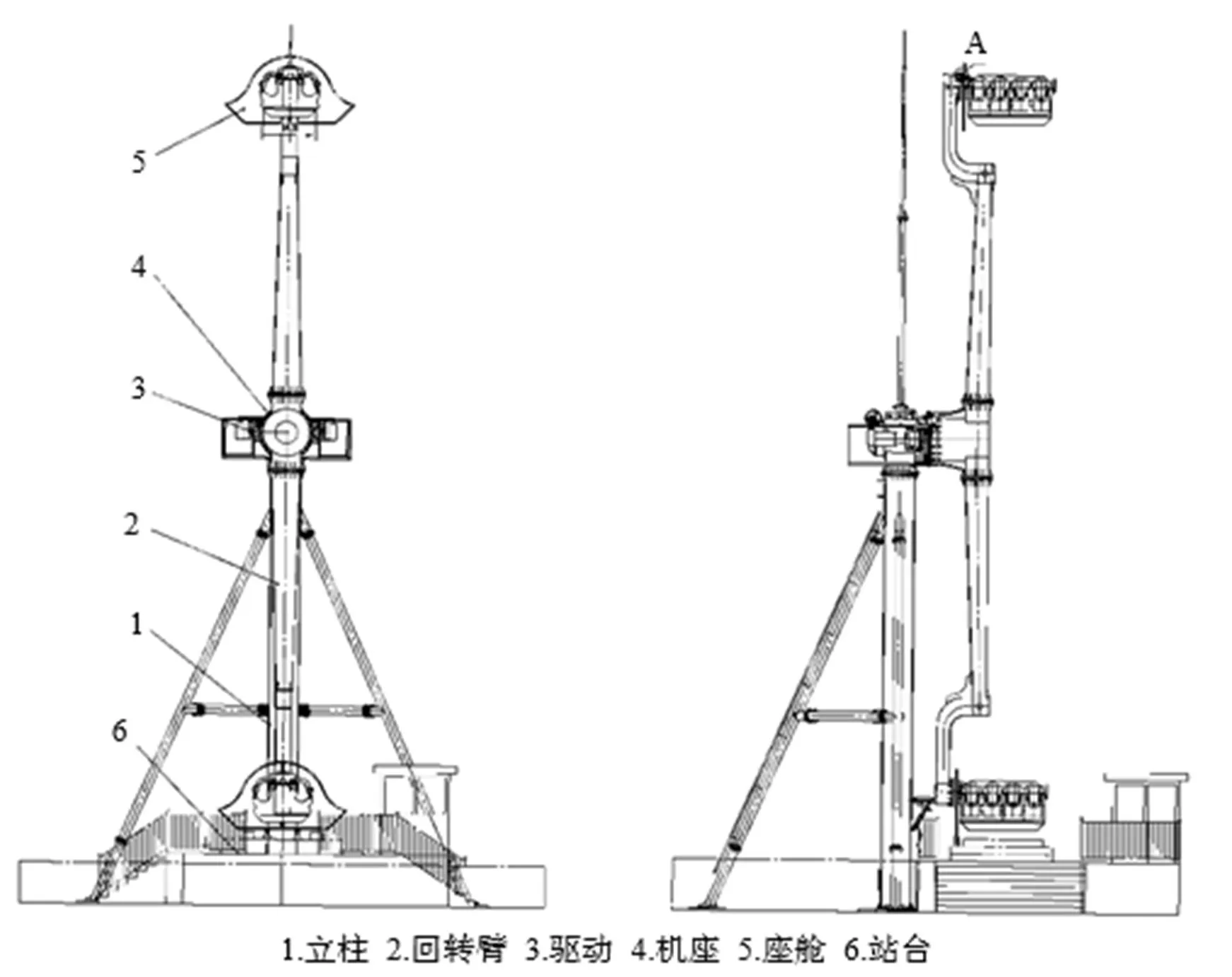
圖2 狂呼結構簡圖
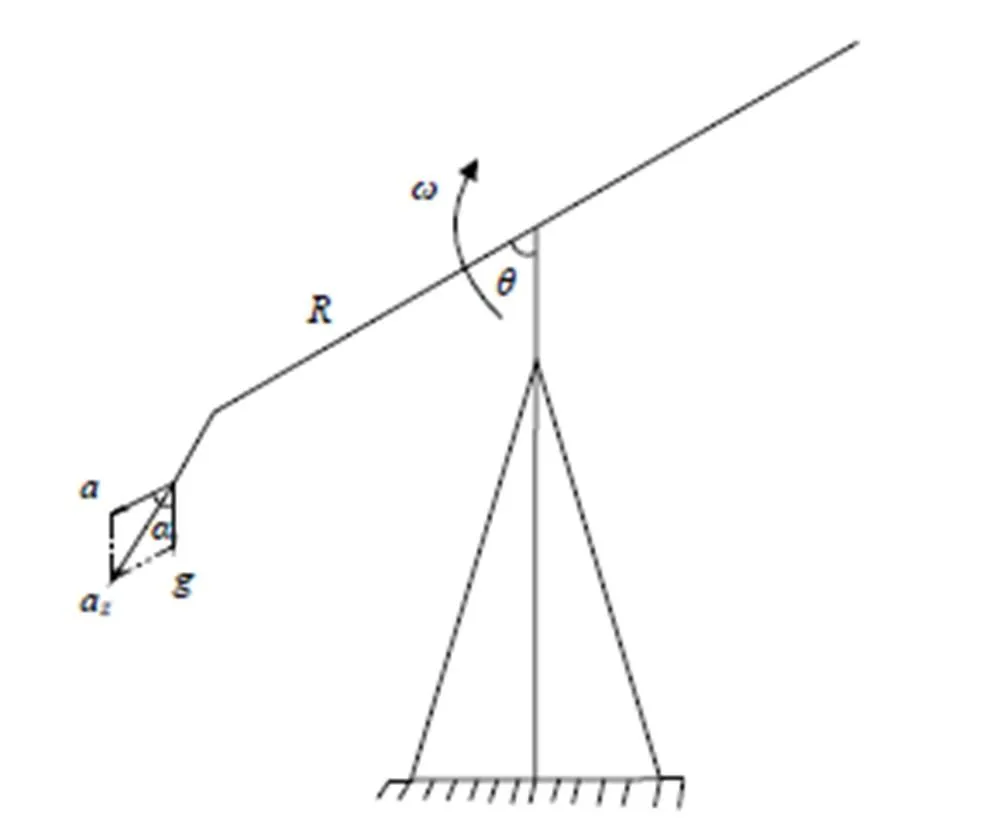
圖3 乘人加速度示意圖
由式(3)可知,運行到最底部時,=0°,重力勢能轉化為動能,速度最大,此時的向加速度最大,為:
a=15.1 m/s2=1.54
運行到最頂時,=180°,向加速度最小,為:
a=4.5 m/s2=0.46
故:a=[0.46, 1.54]
由文獻[4]圖4可知豎直向下[a]=6(1-10%)=5.4。豎直向下相對加速度,由載荷特性分析:a=1.54﹤[a]=5.4,表明豎直方向加速度滿足設計要求。
狂呼旋轉過程中,座艙處于旋轉狀態,由式(2)可知,當回轉臂轉動到水平位置時,離心加速度與重力加速度夾角最大,此時座艙與豎直方向的夾角為:
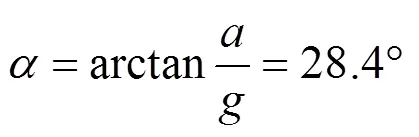

由于座艙為背靠背狀態,乘人加速度對稱,故:
a=[-0.48, 0.48]
由文獻[4]可知,+方向的最大加速度不超過6,-方向的最大加速度不超過3.5[4]。表明乘人前后方向的加速度滿足設計要求。
由于乘人向(側向)無運動,則對應的側向+加速度a=0。
綜上:a=[-0.48, 0.48],a=0,a=[0.46, 1.54]。
2 狂呼的動力學分析
Rigid Dynamics是ANSYS Structural產品的一個附加模塊軟件,它集成于Workbench環境下,在Structural所具有的柔性體動力學(瞬態動力學)分析功能的基礎上,基于全新的模型處理方法和求解算法,專用于模擬由運動副和彈簧連接起來的剛性組件的動力學響應[5]。
Rigid Dynamics提供了完整的運動副類型來自動定義構件的運動關系,并提供了豐富的載荷庫,以此來創建完全參數化的機械系統動力學計算模型。在求解算法上,Rigid Dynamics采用了無需迭代計算和收斂檢查的顯式積分技術,并提供了自動時間步功能,來快速求解復雜系統的動力學特性,輸出位移、速度、加速度和反作用力等歷程曲線[5]。
2.1 載荷與約束
首先依據狂呼的總體尺寸,創建狂呼的有限元實體模型,并分別設置質量屬性,進行幾何樣機的裝配,建立裝配體模型,在此基礎上,進行動力學模型的建立[6]。每個乘人質量為72 kg,利用質量單元(Point Mass),附加到座椅的相應位置。
支架部件的底板固定在地面,因此在立柱底板與地面之間,施加固定(Fixed)約束,模擬底板與地面之間的緊固連接;立柱和撐架與機座之間通過法蘭螺栓固定連接,施加固定(Fixed)約束;在電機、驅動輪的作用下,回轉臂部件繞上部機座中心轉動,座艙通過回轉支承與回轉臂端部連接,在重力和離心力作用下自由旋轉,在相對轉動的約束部位,施加旋轉幅(Revolute)[7]。
運行穩定狀態下,回轉臂部件繞著中軸線轉動的最大角速度為0.73 rad/s。在相對運動的部位,施加驅動載荷(Joint Load),載荷類型為角速度(Rotational Velocity),由于狂呼為單向旋轉類型,啟動時間15 s,達到最大速度,模擬狂呼在整個運行周期內的各種參數,總驅動時間為45 s。
狂呼在整個運行周期內始終受到地球重力的作用,施加重力加速度為9.8 m/s2,方向為負向。載荷與約束如圖4所示。
2.2 結果提取與分析
通過對狂呼動力學仿真分析,可以得到狂呼座艙乘人在運行中的速度、加速度的時間歷程[8]。提取加速度參數,得到圖5。
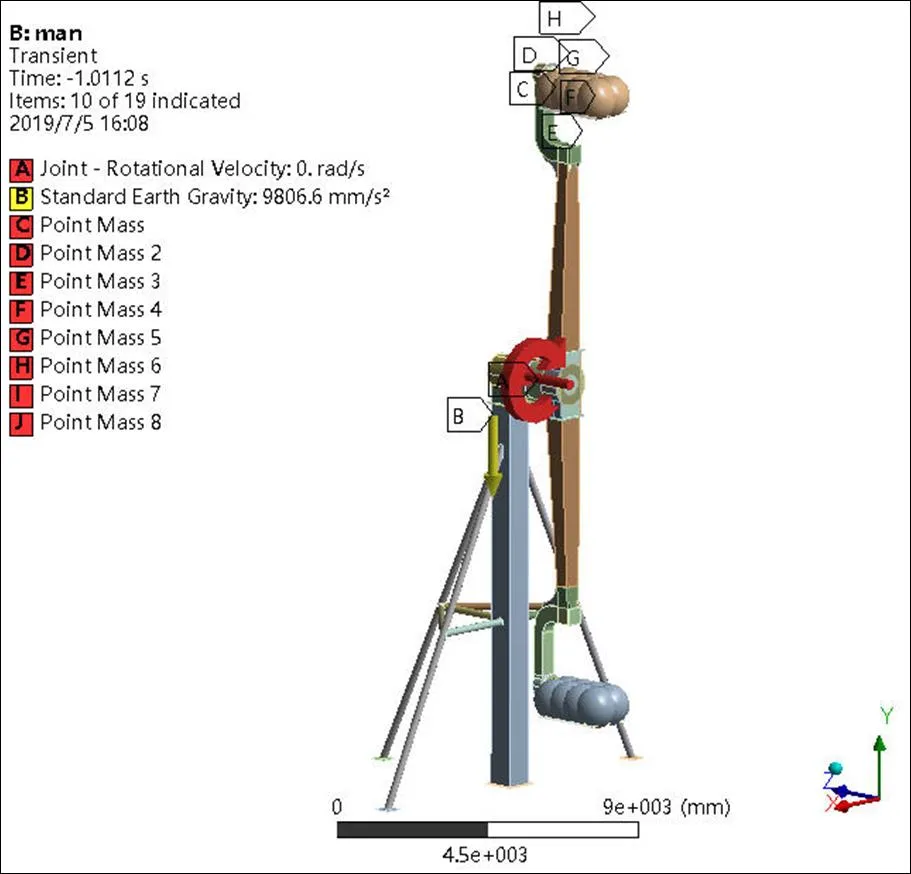
圖4 載荷與約束
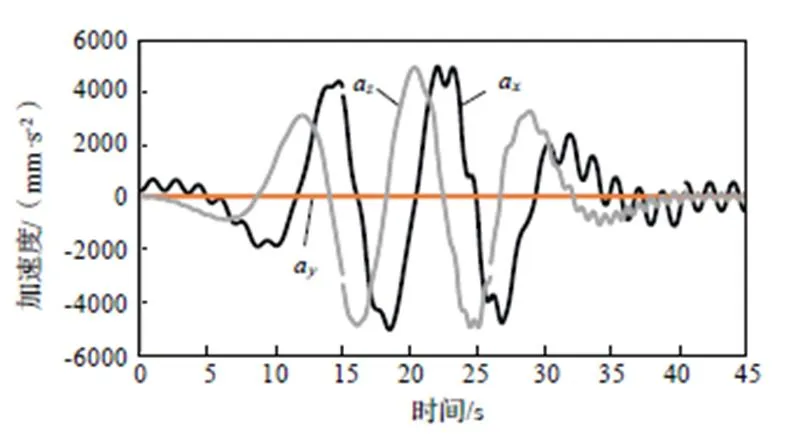
圖5 局部坐標系下乘人加速度
由圖5可知,乘人的最大水平加速度為:
a=5.02 m/s2=0.51
乘人的最大側向加速度為:
a=0
乘人的最大豎直加速度為:
a=±5.11 m/s2=±0.52
由于豎直加速度需考慮慣性加速度,因此:
a=±0.52+1=[0.48, 1.52]
通過以上分析可以看出,仿真結果和理論計算結果非常接近,說明所建立的仿真模型合理,也說明基于虛擬樣機的剛體動力學分析方法和結果的正確性和可靠性。
3 束縛裝置的選型
當游樂設施運行時,乘人有可能在乘坐物內被移動、碰撞或者將被甩出、滑出時,必須設有乘人束縛裝置。束縛裝置包括安全帶、安全壓杠、擋桿等[9]。乘人通過束縛裝置的約束與游樂設施產生一致的運動。安全是游樂設施的根本,與運動加速度相適應的束縛裝置的選型是游樂設施的核心技術之一,過多的束縛是一種浪費,過少的約束又是危險的[10]。
由文獻[4]可知,乘人設計加速度的區域劃分如圖6所示,需依據加速度區域劃分進行束縛裝置選型。由圖6可知大型游樂設施人體坐標系下的、、方向的設計加速度,當加速度a<0(向前)或a<0時(向上),存在將乘人與座艙分離的力,需要安全可靠的乘人束縛裝置。隨著加速度區域由低向5級遞增,危險性不斷增大,應逐漸采取強化措施,提高乘人束縛裝置的安全性和可靠性。
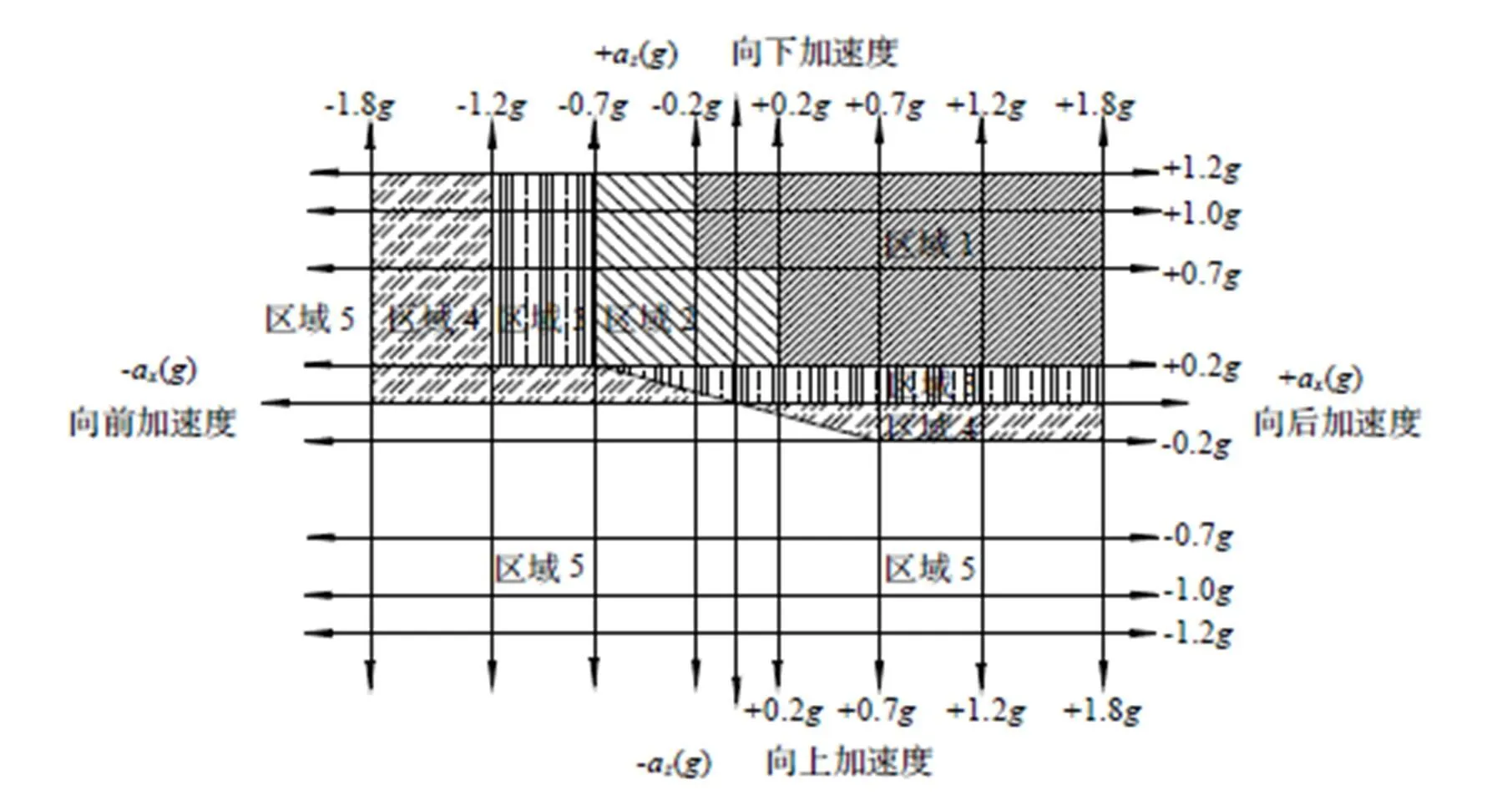
圖6 設計加速度的5個區域
由第1.2節可知,狂呼乘人前后方向、豎直方向的加速度均滿足設計要求。
綜上,狂呼乘人對應設計加速度在圖6區域2。由文獻[4]知,區域2對應2級束縛裝置。根據文獻[4]對束縛裝置的具體要求,設計一套狂呼的束縛裝置,如圖7所示。
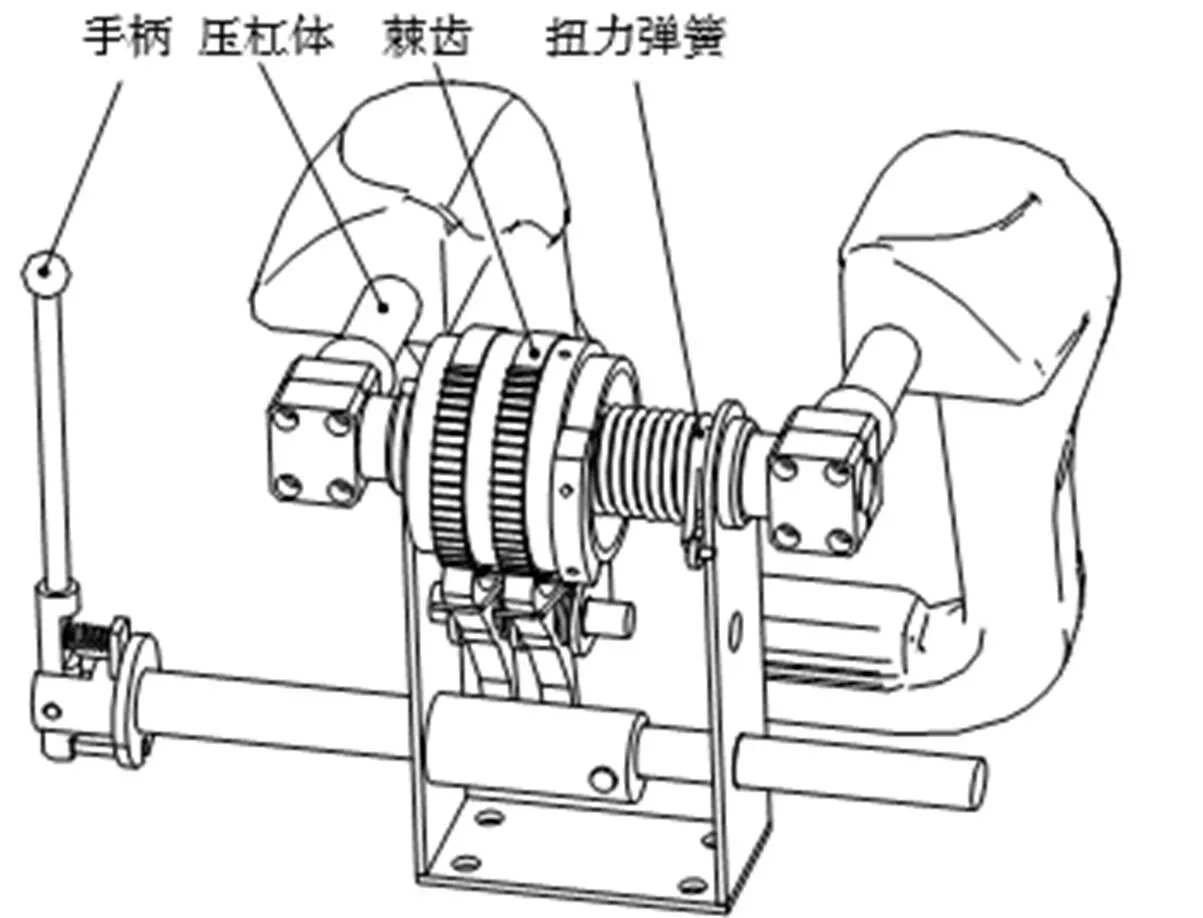
圖7 狂呼束縛裝置
狂呼每個座艙有一套壓杠體裝置和安全帶;鎖緊裝置為棘齒嚙合鎖緊,可以根據乘人體型進行調節,依靠棘齒內彈簧實現自動鎖緊;棘齒鎖緊后,僅能通過操作人員對拉開手柄、打開鎖緊裝置;一套壓杠體鎖緊兩排棘齒,相互獨立。
4 結論
游樂設施乘人束縛裝置的可靠有效與否,直接決定著乘人的人身安全,而乘人加速度的分區,是乘人束縛裝置設計選型的依據[11]。
(1) 通過乘人與束縛裝置的相互作用來確定加速度,并通過實例進行計算,提供了狂呼乘人加速度理論計算方法;
(2)利用Workbench中建立狂呼的動力學模型并進行仿真分析,獲得狂呼乘人加速度時間歷程曲線,狂呼加速度仿真結果與理論計算誤差很小,表明了基于虛擬樣機的剛體動力學分析方法和結果的正確性和可靠性[12];
(3)通過對狂呼乘人加速度的理論計算和仿真分析,可以在設計階段獲得乘人所處的加速度區域,為游樂設施束縛裝置的設計選型和安全評價提供依據,其計算方法和結果可為旋轉類游樂設施乘人加速度的計算和束縛裝置的設計選型提供參考[13]。
[1]王進. “狂呼”游藝機振動建模與力學仿真分析[D]. 湘潭:湖南科技大學,2015.
[2]趙九峰. 基于ANSYS Workbench大擺錘剛體動力學分析[J]. 機械研究與應用,2019(1):44-47.
[3]梁朝虎,沈勇,鄂立軍,等. 游樂設施G加速度分析與判別方法[J]. 中國安全科學學報,2008(11):31-35.
[4]GB 8408-2018,大型游樂設施安全規范[S].
[5]劉笑天,等. ANSYS Workbench結構工程高級應用[M]. 北京:中國水利水電出版社,2015.
[6]朱海榮,陳剛,丁克勤,等. 基于虛擬樣機技術的游樂設施安全分析方法探討[J]. 中國安全科學學報,2004(3):12-15.
[7]梁朝虎,沈勇,秦平彥,等. 滑行車類游樂設施動力學建模與仿真[J]. 中國安全科學學報,2007(9):14-20.
[8]徐永生,鄧貴德,張勇. 數字仿真假人在游樂設施行業中的應用前景[J]. 中國特種設備安全,2018(1):18-23.
[9]張新東. 關于游樂設施人體束縛裝置的思考[J]. 中國特種設備安全,2017(5):9-13.
[10]劉培廣. 游樂設施乘人約束無與加速度的關系[J]. 中國鍋爐壓力容器安全,2005(2):45-50.
[11]徐銳,項輝宇,張勇. 基于加速度的游樂設施乘人束縛裝置應用研究[J]. 中國特種設備安全,2019(10):8-11.
[12]孫穎宏,張曉鐘. 基于虛擬樣機的發動機曲軸系動力學仿真分析[J]. 機械,2007(8):35-38.
[13]趙九峰. 基于ANSYS Workbench自控飛機回轉機構驅動功率的計算及電機選型[J]. 機械,2019(4):30-33.
Acceleration Calculation and Constrained Device Selection of Scream Based on Workbench
SU Xiaofeng1,ZHAO Jiufeng1,DING Zhoubo2,LI Yanbing1
( 1.Special Equipment Safety Inspection and Research Institute of He’nan Province, Zhengzhou 450008, China; 2.School of Mechanical and Electrical Engineering, ZhongyuanUniversity of Technology, Zhengzhou 450007, China )
A theoretical calculation method of acceleration of Scream is given in this paper, and time history curves is extracted on the basis of dynamic simulation analysis by Workbench. Compared with the theoretical calculation results, indicates that the simulation results is reliability and validity. Directs the selection of the passenger constrained device by calculating and dividing into different regions the acceleration of the passenger, which provide the reference for the acceleration calculation and constrained device selection of Rotary type rides, Restrain and control the unsafe behavior of the passengers by the reliability of the constrained device, and improve the intrinsic security of amusement facilities.
scream amusement;g-acceleration;constrained device;dynamics;virtual prototype;amusement facilities
X941
A
10.3969/j.issn.1006-0316.2020.05.003
1006-0316 (2020) 05-0018-06
2019-11-18
蘇曉峰(1972-),女,河南長垣人,高級工程師,主要從事特種設備檢驗技術管理工作。*通訊作者:趙九峰(1981-),男,河南平頂山人,碩士研究生,CAD/CAE工程師、檢驗師,主要從事游樂設備設計計算、特種設備結構仿真與載荷響應研究工作,E-mail:zjf_2002@163.com。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50