基于離散蒙特卡洛的一種3T1R并聯(lián)機(jī)構(gòu)工作空間分析
2020-06-09 07:24:12李旭羅霞羅成孫淼
機(jī)械 2020年5期
李旭,羅霞,羅成,孫淼
基于離散蒙特卡洛的一種3T1R并聯(lián)機(jī)構(gòu)工作空間分析
李旭1,羅霞1,羅成1,孫淼*,2
(1.東方電氣集團(tuán)東方汽輪機(jī)有限公司,四川 德陽 618000;2.四川省機(jī)械研究設(shè)計(jì)院,四川 成都 610063)
針對一種拓?fù)浣Y(jié)構(gòu)為2-PRPU型的3T1R空間并聯(lián)機(jī)構(gòu),采用離散式蒙特卡洛法,通過對動(dòng)平臺轉(zhuǎn)動(dòng)自由度作離散化處理,在輸入對稱的情況下,實(shí)現(xiàn)了整個(gè)空間并聯(lián)機(jī)構(gòu)的定姿態(tài)工作空間、可達(dá)工作空間和靈活工作空間的可視化。從定姿態(tài)工作空間、靈活工作空間和可達(dá)工作空間的角度分析2-PRPU型空間并聯(lián)機(jī)構(gòu)的工作性能,表明該機(jī)構(gòu)動(dòng)平臺的可達(dá)工作空間范圍較大,且大部分為靈巧工作空間。這為多自由度空間并聯(lián)機(jī)構(gòu)的研究和應(yīng)用提供理論基礎(chǔ)。
3T1R;并聯(lián)機(jī)構(gòu);工作空間;離散蒙特卡洛
并聯(lián)機(jī)構(gòu)是具有兩個(gè)或兩個(gè)以上自由度,且以并聯(lián)方式驅(qū)動(dòng)的一種閉環(huán)機(jī)構(gòu)[1-2],其中3T1R并聯(lián)機(jī)構(gòu)[3-6]能夠?qū)崿F(xiàn)三個(gè)方向的平移和繞一個(gè)軸的轉(zhuǎn)動(dòng)。根據(jù)所繞軸線的不同,可將3T1R機(jī)構(gòu)分為3T1R、3T1R、3T1R,即動(dòng)平臺可實(shí)現(xiàn)三維平動(dòng)(,,)和分別繞、、軸的轉(zhuǎn)動(dòng)[7]。目前應(yīng)用最多的是3T1R型并聯(lián)機(jī)構(gòu)。在實(shí)際生活中,3T1R并聯(lián)機(jī)構(gòu)由于剛性好、動(dòng)態(tài)性能好等優(yōu)點(diǎn)在快速抓取、高速分揀等領(lǐng)域被大量應(yīng)用。工作空間是3T1R機(jī)構(gòu)工作性能的重要指標(biāo)之一,通過對工作空間的可視化研究可以幫助設(shè)計(jì)人員完善和改進(jìn)機(jī)構(gòu)設(shè)計(jì),幫助控制人員完成路徑規(guī)劃等。
并聯(lián)機(jī)構(gòu)工作空間的研究方法主要有解析法、圖論解法及數(shù)值法[8],其中以解析法和數(shù)值法最為常見。解析法具有較高的精度,但依賴于求解機(jī)構(gòu)運(yùn)動(dòng)學(xué)正解,而對并聯(lián)機(jī)構(gòu)而言,正解求解過程一般非常繁瑣。數(shù)值法既可依賴于機(jī)構(gòu)運(yùn)動(dòng)學(xué)正解也可依賴于機(jī)構(gòu)運(yùn)動(dòng)學(xué)反解,由于正解求解困難,故數(shù)值法一般通過機(jī)構(gòu)的運(yùn)動(dòng)學(xué)反解分析工作空間。文獻(xiàn)[9-10]使用數(shù)值法分析了六自由度并聯(lián)機(jī)構(gòu)的工作空間。文獻(xiàn)[11-12]采用極坐標(biāo)搜索法研究3-RRR平面并聯(lián)機(jī)器人的工作空間邊界,并對邊界進(jìn)行了優(yōu)化。文獻(xiàn)[13]采用基于混沌映射算法的水波法對并聯(lián)機(jī)構(gòu)的工作空間進(jìn)行快速搜索,并對相應(yīng)的機(jī)構(gòu)參數(shù)進(jìn)行了優(yōu)化研究。文獻(xiàn)[14]中通過D-H方法建立3-PRRU并聯(lián)機(jī)構(gòu)的正解數(shù)學(xué)模型,得到非線性方程組,利用MATLAB數(shù)值求解方程,實(shí)現(xiàn)了工作空間的仿真。
1 2-PRPU機(jī)構(gòu)描述與分析
本文研究的2-PRPU型3T1R空間并聯(lián)機(jī)構(gòu)如圖1所示。O-yz和O-yz分別為固定在機(jī)架和動(dòng)平臺上的笛卡爾坐標(biāo)系,它們通過2個(gè)PRPU支鏈相互連接,每個(gè)PRPU支鏈包含一個(gè)與機(jī)架相連的PR副(P副與R副組成一個(gè)C副),C副的軸線平行于U鉸鏈中第一個(gè)R副的鉸鏈。動(dòng)平臺通過2個(gè)R副與2個(gè)支鏈相連,兩個(gè)R副的軸線相互平行并且在運(yùn)動(dòng)中一直保持平行關(guān)系。1和3分別是點(diǎn)1和2到定坐標(biāo)系原點(diǎn)O的距離,表示兩個(gè)與機(jī)架相連的P副的輸入運(yùn)動(dòng)變量。2和4分別是構(gòu)件11與22的長度(即支鏈長度),表示剩下兩個(gè)P副的輸入運(yùn)動(dòng)變量。表示構(gòu)件12的長度。姿態(tài)角是構(gòu)件12與軸間的夾角(逆時(shí)針方向?yàn)檎硎玖藙?dòng)平臺的轉(zhuǎn)動(dòng)運(yùn)動(dòng)。角度θ(=1,2,…,6)分別表示了6個(gè)R副的副變量。1和θ2、4和5、3和6依次為與軸、、的逆時(shí)針方向夾角。
圖1所示機(jī)構(gòu)中,兩個(gè)C副的軸線分別平行于軸和軸,因此兩個(gè)U鉸鏈的第二個(gè)R副的軸線均平行于軸。1和2是兩個(gè)U鉸鏈的幾何中心。1(2)是1(2)到軸()垂線的垂足。兩個(gè)U鉸鏈的第二個(gè)R副的軸線方向必須保持相互平行,而兩個(gè)U鉸鏈的第一個(gè)R副轉(zhuǎn)動(dòng)方向均由各自相連的PRPU支鏈從幾何上確定。因此,在運(yùn)動(dòng)過程中動(dòng)平臺法方向不變,動(dòng)平臺始終繞()軸旋轉(zhuǎn)。

圖1 機(jī)構(gòu)示意圖
2 機(jī)構(gòu)的位置反解與約束條件
以四元組(1,2,3,4)T表示輸入運(yùn)動(dòng)空間中的一點(diǎn),1、2、3和4對應(yīng)各個(gè)驅(qū)動(dòng)器的運(yùn)動(dòng)變量。以在定坐標(biāo)系O-yzb中動(dòng)平臺上點(diǎn)1坐標(biāo)(1,1,1)和姿態(tài)角唯一表示動(dòng)平臺的位姿。以四元組(1,1,1,)T表示工作空間中的一個(gè)點(diǎn),即機(jī)構(gòu)的實(shí)際工作空間由(1,1,1,)T的集合表示。
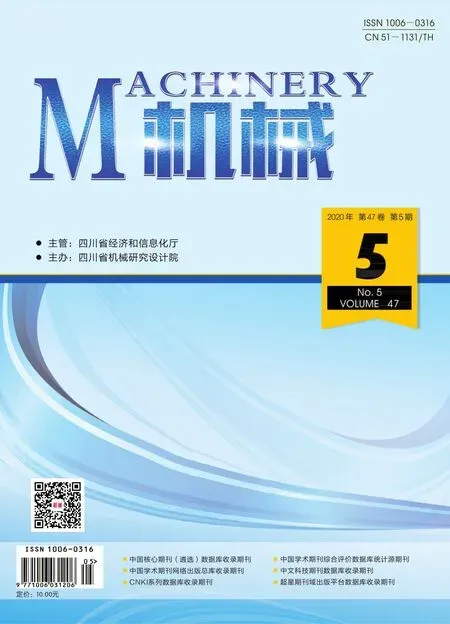
直接由圖1可以得下列關(guān)系:


式中:1、2、1、2為在坐標(biāo)系O-xyz中對應(yīng)各點(diǎn)的坐標(biāo)向量。
運(yùn)動(dòng)學(xué)反解分析是在給定動(dòng)平臺位姿的情況下,找到所有滿足約束條件的驅(qū)動(dòng)器參數(shù),即在給定(1,1,1,)T的情況下,找到所有的(1,2,3,4)T。在本文研究的2-PRPU型3T1R并聯(lián)機(jī)構(gòu)中,一旦給定1、1、1和,輸入運(yùn)動(dòng)參數(shù)1和2可以計(jì)算為:

然后,2點(diǎn)的坐標(biāo)可以由式(3)算出:

最后,剩下的輸入運(yùn)動(dòng)參數(shù)3和4計(jì)算為:

考慮對應(yīng)于實(shí)際情況的P副一般由直線電機(jī)或者油缸等驅(qū)動(dòng)器驅(qū)動(dòng),其直線行程有一定范圍,相應(yīng)地假設(shè)該2-PRPU型3T1R并聯(lián)機(jī)構(gòu)中四個(gè)P副的直線輸入運(yùn)動(dòng)在一定范圍內(nèi)且均為[0,20]。則可有如下工作空間約束條件:

3 并聯(lián)機(jī)構(gòu)工作空間分析的離散式蒙特卡洛法原理
3T1R機(jī)構(gòu)包含四個(gè)自由度,其可視化相對較難,往往需對其降維。本文采用的離散式蒙特卡洛法不但可應(yīng)用于最常見的3T1R型四自由度并聯(lián)機(jī)構(gòu),亦可用于3T1R型和3T1R型。
離散式蒙特卡洛法基于蒙特卡洛法,是一種利用“隨機(jī)數(shù)”或“偽隨機(jī)數(shù)”結(jié)合機(jī)構(gòu)運(yùn)動(dòng)學(xué)反解進(jìn)行并聯(lián)機(jī)構(gòu)工作空間可視化分析的方法,其適用于絕大多數(shù)3T1R空間并聯(lián)機(jī)構(gòu)。關(guān)于離散式蒙特卡洛法的具體原理介紹及算法流程可以參考文獻(xiàn)[15]。結(jié)合前期的工作,可以給出應(yīng)用Mathematica軟件分析該2-PRPU并聯(lián)機(jī)構(gòu)的算法,如圖2所示。

圖2 計(jì)算流程圖
4 工作空間可視化分析
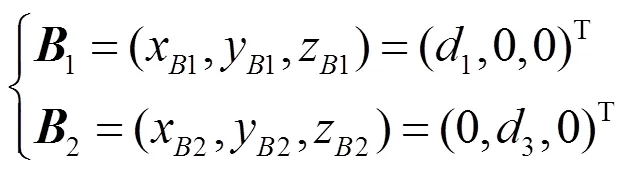
下面以本文中的2-PRPU型3T1R空間并聯(lián)機(jī)構(gòu)工作空間可視化為例,在Mathematica中可視化分析機(jī)構(gòu)的定姿態(tài)工作空間、靈活工作空間和可達(dá)工作空間,相關(guān)參數(shù)如表1所示。
表1 機(jī)構(gòu)相關(guān)參數(shù)表
4.1 定姿態(tài)工作空間
定姿態(tài)工作空間是指機(jī)構(gòu)的動(dòng)平臺在約束條件下以某一固定姿態(tài),動(dòng)平臺參考點(diǎn)能夠到達(dá)的所有位置的點(diǎn)的集合[16]。本文機(jī)構(gòu)中,用前面所述的角表示動(dòng)平臺的繞()軸的姿態(tài)夾角,1為動(dòng)平臺參考點(diǎn),則定姿態(tài)工作空間S是取定每一個(gè)α角對應(yīng)的1點(diǎn)所能達(dá)到的范圍。這里取姿態(tài)角為0、π/4、π/2、3π/4、π對應(yīng)的定姿態(tài)工作空間如圖3所示。

圖3 姿態(tài)角為0、π/4、π/2、3π/4、π時(shí)定姿態(tài)工作空間
從圖3可以看出,當(dāng)姿態(tài)角為π時(shí),工作空間是最大;當(dāng)姿態(tài)角為π/2時(shí),工作空間最小。姿態(tài)角從0~π過程中,工作空間呈現(xiàn)先逐漸較小后逐漸增大的趨勢。
4.2 可達(dá)工作空間
機(jī)構(gòu)的可達(dá)工作空間指在結(jié)構(gòu)限制下機(jī)構(gòu)動(dòng)平臺的姿態(tài)角在0~2π范圍內(nèi)連續(xù)變化,所得到的所有定姿態(tài)工作空間的并集[17]。從圖4可以看出,該并聯(lián)機(jī)構(gòu)的可達(dá)工作空間體積較大,邊界清晰且內(nèi)部無空腔或空洞,機(jī)構(gòu)動(dòng)平臺運(yùn)動(dòng)范圍較大。這有利于該型3T1R并聯(lián)機(jī)構(gòu)的實(shí)際應(yīng)用,也能為在該機(jī)構(gòu)基礎(chǔ)上改進(jìn)大工作空間的并聯(lián)機(jī)器人提供參考。
4.3 靈活工作空間
靈活工作空間指機(jī)構(gòu)末端執(zhí)行器任意能夠到達(dá)的區(qū)域[18]。靈活工作空間范圍越大說明機(jī)構(gòu)的工作性能越好。給出2-PRPU型3T1R空間并聯(lián)機(jī)構(gòu)的靈活工作空間如圖5所示,可以看出該機(jī)構(gòu)的靈活工作空間占可達(dá)工作空間的比例較大,因此該機(jī)構(gòu)具有較好的工作性能。

圖5 靈活工作空間
5 結(jié)論
結(jié)合離散式蒙特卡洛法分析了2-PRPU型3T1R空間并聯(lián)機(jī)構(gòu)的定姿態(tài)工作空間、可達(dá)工作空間、靈活工作空間,結(jié)果表明該2-PRPU的定姿態(tài)工作空間隨姿態(tài)角變換而變化,且在姿態(tài)角為π時(shí)最大。通過各姿態(tài)角對應(yīng)的定姿態(tài)工作空間的并集,可得該機(jī)構(gòu)的可達(dá)工作空間,從可達(dá)工作空間的可視化結(jié)果可看出,該機(jī)構(gòu)的動(dòng)平臺能到達(dá)的空間范圍較大,這將為該機(jī)構(gòu)的實(shí)際應(yīng)用奠定有利基礎(chǔ)。通過各姿態(tài)角對應(yīng)的定姿態(tài)工作空間的交集得到該機(jī)構(gòu)的靈活工作空間,可發(fā)現(xiàn)靈活工作空間占可達(dá)工作空間的比例較大,但還有提升空間,這將為以后改進(jìn)該機(jī)構(gòu)提供參考。
[1]翟慶鐘,王衛(wèi)兵,馮靜安,等. 基于Stewart平臺的六軸并聯(lián)機(jī)床的研究[J]. 機(jī)械,2013(11):23-26.
[2]汪蘇,懷其武,苗新剛,等. 一種二自由度并聯(lián)機(jī)構(gòu)設(shè)計(jì)及空間誤差建模[J]. 機(jī)械,2012(8):7-11.
[3]Amine S,Mokhiamar O,Caro S. CLASSIFICATION OF 3T1R PARALLEL MANIPULATORS BASED ON THEIR WRENCH GRAPH[J]. Journal of Mechanisms & Robotics,2017,9(1):011003.
[4]石志新,葉梅燕,羅玉峰,等. 3T1R并聯(lián)機(jī)構(gòu)結(jié)構(gòu)設(shè)計(jì)與位置分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(8):364-369.
[5]涂葉凱. 3T1R并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析與尺度優(yōu)化[D]. 杭州:浙江理工大學(xué),2018.
[6] Tu Y.,Chen Q.,Ye W.,et al. Kinematics, singularity, and optimal design of a novel 3T1R parallel manipulator with full rotational capability[J]. Journal of Mechanical Science and Technology,2018,32(6):2877-2887.
[7]朱偉,顧開榮,王傳偉,等. 一種3T1R并聯(lián)機(jī)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)學(xué)性能分析[J]. 中國機(jī)械工程,2018,29(1):14-21.
[8]劉志忠,柳洪義,羅忠,等. 機(jī)器人工作空間求解的蒙特卡洛法改進(jìn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2013,44(1):230-235.
[9]Arai T,Cleary K,Nakamura T,Adachi H,Homma K. Design, analysis and construction of a prototype parallel link manipulator [C]. IEEE International Workshop on Intelligent Robots and Systems IROS’90,1990:205-212.
[10] Fichter E F. A Stewart-Platform based manipulator: general theory and practical construction[M]. Sage Publications Inc.,1986.
[11]曹麗亞,崔建昆,宋亞楠. 3-RRR平面并聯(lián)機(jī)器人工作空間邊界求解和靈活性研究[J]. 機(jī)械傳動(dòng),2016,40(8):38-42.
[12]朱心平,崔建昆,張?jiān)? 求解3-RRR平面并聯(lián)機(jī)器人工作空間的迭代搜索法[J]. 機(jī)械研究與應(yīng)用,2010(3):48-49.
[13]夏永強(qiáng),羅玉峰,石志新,等. 基于水波法的并聯(lián)機(jī)構(gòu)的工作空間分析與參數(shù)優(yōu)化研究[J]. 機(jī)械傳動(dòng),2018(6):58-63.
[14]劉家念. 3-PRRU并聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)分析[D]. 天津:天津理工大學(xué),2013.
[15]陳光平,韓遠(yuǎn)飛,肖鐵忠. 基于計(jì)算機(jī)的空間并聯(lián)機(jī)構(gòu)工作空間的可視化分析(英文)[J]. 機(jī)床與液壓,2018,46(12):139-144.
[16]Snyman J A,Plessis L J D,Duffy J. An Optimization Approach to the Determination of the Boundaries of Manipulator Workspaces[J]. Journal of Mechanical Design,2000,122(4):447-456.
[17]夏永強(qiáng),羅玉峰,石志新,等. 3T1R并聯(lián)機(jī)構(gòu)的工作空間與參數(shù)優(yōu)化[J]. 機(jī)械設(shè)計(jì)與研究,2017(6):10-14.
[18]朱海飛,管貽生,吳文強(qiáng),等. 基于二分逼近原理的定姿態(tài)工作空間快速搜索方法[J]. 機(jī)器人,2013,35(6):709-715.
A Discrete Monte Carlo Approach to Workspace Analysis of a Type of 3T1R Parallel Mechanism
LI Xu1,LUO Xia1,LUO Cheng1,SUN Miao2
(1.Dongfang Turbine Co., Ltd., Dongfang Electric Corporation, Deyang 618000, China; 2.Sichuan Provincial Machinery Research & Design Institute, Chengdu 610063, China)
The paper studies a type of 3T1R spatial parallel mechanism with the topology of 2-PRPU. Discrete Monte Carlo approach is applied to perform the discretization of the rotational degrees of freedom of the moving platform, which enables the visualization of the fixed-orientation, reachable and dexterous workspace of the mechanism with symmetrical inputs. The performance analysis of 2-PRPU mechanism based on fixed- orientation, reachable and dexterous workspace indicates that the reachable workspace of the mechanism’s moving platform is large and the dexterous workspace accounts for a large proportion of the reachable workspace, which laid the foundation of the research and application of multi-DOF parallel mechanism.
3T1R;parallel mechanism;workspace;discrete Monte Carlo
TH112
A
10.3969/j.issn.1006-0316.2020.05.005
1006-0316 (2020) 05-0027-06
2020-01-06
四川省科技計(jì)劃(國際合作)資助項(xiàng)目(2018HH0144)
李旭(1977-),男,四川資陽人,高級工程師,主要研究方向?yàn)闄C(jī)械設(shè)計(jì)及制造。*通訊作者:孫淼(1987-),男,四川德陽人,工學(xué)碩士,工程師,主要研究方向?yàn)闄C(jī)構(gòu)學(xué)、機(jī)電控制,E-mail:sunmiao198@sina.com。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44