輕小型無人機飛控測姿數據輔助測圖精度性問題探討
2020-06-10 09:37:16陶源
科學技術創新 2020年9期
關鍵詞:影響
陶源
(中國市政工程中南設計研究總院有限公司,湖北 武漢430014)
隨著我國經濟體制的不斷發展與完善,現代土地資源管理工作的要求也在持續提高。其中,無人機測繪作為土地資源數據匯總的主要手段,若是在測圖精度方面存有偏差,不但會影響土地資源管理與審核的準確性,使土地資源的可控性降低,同時也會影響后續地籍管理等工作的開展,使土地資源的利用率下降。因此,如何有效提升無人機飛控測姿數據測圖精度,便需要得到技術部門與人員的重視。
1 姿態轉換與測量精度的影響
站在輕小型無人機飛控測姿數據輔助測圖精度偏差誘因角度來看,目前主要可分為以下四種:(1)原有傳感器原件技術水準偏低,并且測算精度很難滿足現代航測圖紙提高精度的要求,普遍姿態精度都會低于±2.00°,由此便極易誘發測繪精度不足與偏差問題;(2)輕小型無人機采用了姿態傳感器與攝影傳感器剛性連接的措施,使得無人機航測過程中的數據會相互影響,最終使姿態與攝影傳感器的軸向產生系統誤差,而經過調查,此種偏差數值通常可以控制在0.50°以內;(3)受地域氣候、設備技術與網絡環境等因素影響,飛控系統在操作相機攝影的過程中,經常會存有曝光延遲的情況,這使得姿態數據與影像數據的傳到產生微小偏差,技術人員很難核對并確定曝光延遲時間,因此便會造成不可控的精度差異;(4)通常飛控測姿數據需要結合ROll、Pitch、Yaw三者數據繪制攝影測量坐標系,過程中受外界元素影響,經常會使坐標系數據產生偏差,對此便需要經常對坐標系數據進行變換, 此時坐標系數據受無人機姿態的影響,通常會產生微小的偏差。對于此種情況,操作者通常會將坐標系原點定位在傳感器的中心,并自動核實東方、北方與垂直向上的坐標軸,以便外方位元素與攝影測量坐標系關聯,使二者偏差數值便于轉換與識別。
而從無人機航空攝影測量角度來看,ω、φ、κ 三者也是較常見的精度數據。其中,ω 與φ 若是出現測量數據偏差,極易使平面與高程方向的測算數據精度受影響; 而κ 若是出現測量數據偏差,則會直接對平面數據的測量精度造成影響,三者影響特征各不相同,但都會使最終數據出現失真的問題。
2 影響飛控測姿數據精度的問題特征
姿態轉換主要包括7 個過程:①ROll、Pitch、Yaw角轉換為ωz、φz、κz;②將每個架次中的每條航線得到的ωz、φz、κz與“空三”數據ω、φ、κ 對應相減得到每條航線總誤差V; ③求得每條航線總誤差V的平均值即Vm;④將每條航線總誤差V與Vm相減剔除地面坐標軸與安裝形成的系統誤差,得到電子元器件對姿態所形成的粗差Vv; ⑤求得每個架次中所有航線的3 個角度的中誤差|Vs(φ)|、|Vs(ω)|、|Vs(κ)|,以此來反映姿態數據所形成的誤差;⑥按照航向重疊度60%計算俯仰角對航向影響最大光線角度,對高度影響最大光線角度; 按照旁向重疊度40%計算側滾角對旁向影響最大光線角度,對高度影響最大光線角;⑦利用航測數據高程平均值作為飛行行高H,結合最大光線角度及以上每個架次ω、φ、κ 姿態角所求的中誤差Vs(φ)、Vs(ω)、Vs(κ)利用相關公式分別進行測圖精度影響分析。
結合飛控測姿數據內容可知,在地理定向期間,所有無人家架次姿態呈現以下特征:(1) 無人機俯仰角誤差最小為0.74°, 最大為5.60°, 平均誤差值為3.256°;(2) 無人機側滾角誤差值最小為0.44°,最大為6.42°,平均誤差值為3.469°;(3)無人機偏航角誤差值最小為0.67°,最大為11.38°,平均誤差值為5.12°。
通過姿態測量精度偏差推演公式可知,無人機的地面測圖的精度數值與角度、光線、主光軸夾角有明顯的關聯性,隨著無人機飛行高度的持續提升,這種測圖精度的偏差還會逐漸增加。其中,無人機飛行高度與俯仰角測算偏差的關系為0.066H, 與地面高程測算的關系為0.266H;飛行高度與橫滾角偏差的平面關系為0.078H,與地面高程測算的關系為0.161H; 無人機飛行高度與偏航角偏差的平面關系為0.099H。
另外,數碼傳感器的規格與姿態測量精度數值也有所關聯。通常, 無人機選用傳感器規格普遍為36X24mm, 像元4.9μm, 焦距28mm。此類傳感器的航向重疊度普遍為60%,旁向重疊度為40%,此時若無外界環境因素影響,則地面分辨率可控制在0.1m,若無人機飛行高度達到570m范圍,則定向俯仰角測量誤差會達到39.41m左右,而高程誤差則會達到146.22m;在橫滾角測量誤差方面,數值可達到50.94m,高程誤差數值可達到89.12m;偏航角測量誤差方面數值可達到60.60m,普遍誤差值較高,難以為地面測圖工作的開展提供有效幫助。
3 飛控測姿數據的改正對策
若要使無人機飛控測姿數據的精度滿足地面測圖工作要求,通常姿態信息可通過高精度POS設備采集并處理, 以便使測姿數據的質量得以保障。但從無人機操作與使用角度來看,高精度POS設備的重量、體積功耗均很難應用至無人機設備中,否則極易對輕小型無人機的升空高度與續航能力造成影響。因此,目前常通過外方位數據內容反向推算無人機的姿態數據,通過平差內容判斷大致的計算結果,以便得出相對準確的姿態真值。但從目前數據處理與匯總條件來看,我國在無人機飛控測姿數據領域資料研究深度明顯不足, 若要尋找一條專用于評估無人機姿態穩定的數據存有較高難度。
為謀求飛控測姿數據的科學性與準確性,本文基于以往飛控經驗與數據統籌平臺,對飛控系統內記錄的姿態數據與影像內容進行了研究,由專業人員對姿態數據與外方位元素進行核對,以便判斷輕小型無人機俯仰角、橫滾角與偏航角的確切狀況與誤差分布。具體數據如表1 所示。
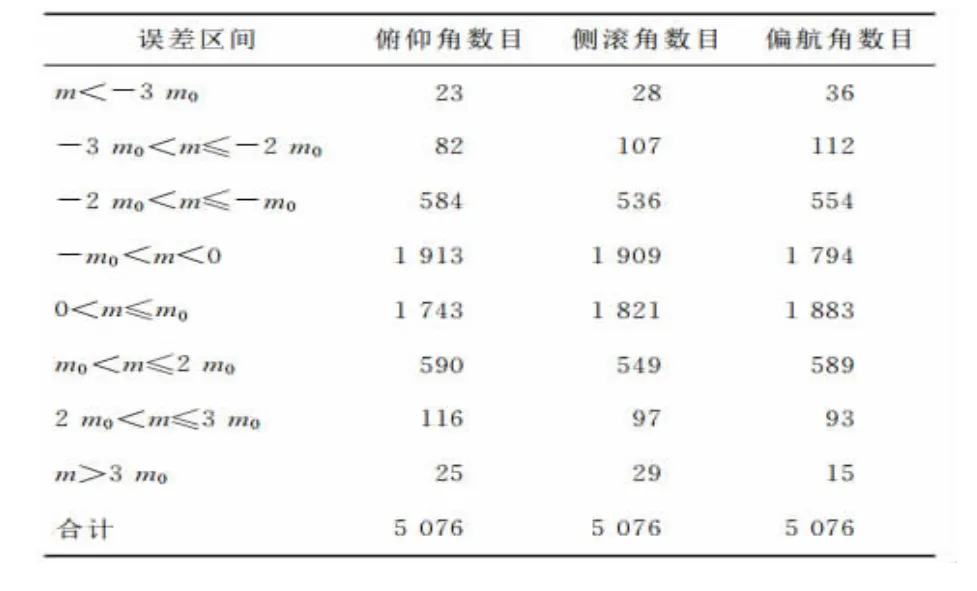
表1 姿態角觀測值誤差分布情況
其中,m代表著無人機各觀測數值的偏差, 而m0為該區間內觀測值的偏差。由表1 數據可知,輕小型無人機觀測過程中,俯仰角、側滾角與偏航角數目偏差多集中在單倍幅度內,并且俯仰角2 倍誤差數值占總比例的4.94%,側滾角占5.14%,偏航角占5.05%。基于偏差正態分布規律可知,偏差值P<0.05,其偏差數值可劃分至小概率事件,而三種角度偏差都集中在臨近0.05 的區間內,這便說明飛控測姿數據超出2 倍誤差數值的概率較低,對整體地面測圖精度的影響較小。因此,即便是輕小型無人機采用無集成座駕系統,在地面測圖工作中的精度能夠滿足遙感作業的標準與精度要求。而若是能夠將集成座駕系統應用于輕小型無人機設備內,同樣能夠有效將俯仰角、橫滾角與偏航角的偏差值降低,使地面測繪數據的整體精度得到提升。
另外,在輕小型無人機操控期間,操作人員可借助“空三”數據對航行軌道的方位進行三角測量,以便得到確切的空間坐標,便于求證俯仰角、側滾角與偏航角的偏差數值,而在同名點點位與數量不變的情況下,操作人員同樣可借助POS 確定外方位元素,而后根據實際測算情況替換“空三”的元素內容。為確保測算精度得到提升,操作人員仍需基于數據對航行軌道方位進行三角測量,并確定各個同名點的空間坐標,計算數據的偏差值。可知,平面航向與高程偏差值范圍遠低于原有偏差,因此通POS 外方位元素轉換對策,能夠有效縮減輕小型無人機俯仰角、側滾角與偏航角的偏差,使飛控測姿數據的精度得到優化。
4 結論
飛控測姿數據改正措施的有效落實,既能夠通過飛控姿態數據的外方位元素與“空三”外方位元素的轉換關系,縮減無人機俯仰角、橫滾角與偏航角的偏差數值,使偏差精度控制在允許范圍內,同時憑借POS 裝置的應用,也能夠優化測控數據的質量,使測控精度得到最基本的保障。故而,在論述如何縮減飛控測姿數據的精度偏差期間,必須明確坐標系與設備技術存在的問題,以便更有效的控制地理測圖的精度數據。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
知識經濟·中國直銷(2016年3期)2016-02-27 16:15:49
現代檢驗醫學雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學低年級版)(2011年3期)2011-01-01 00:00:00