基于PLC和伺服電機的主動沖箱式造波系統的控制及實現
2020-06-12 05:34:00郝宗睿李超張浩華志勵任萬龍
山東科學 2020年3期
關鍵詞:實驗
郝宗睿,李超,張浩,華志勵,任萬龍
(齊魯工業大學(山東省科學院) 山東省科學院海洋儀器儀表研究所,山東 青島 266100)
造波作為一項重要的實驗技術,在海洋工程領域占有重要的位置。造波機能夠實現各種模型實驗所需的模擬波浪,在有限的區域范圍內盡可能模擬出真實的海域環境[1]。而船舶及海洋裝備的發展對模擬實驗的準確度提出了更高要求,迫切需求較高精度的波浪模擬設備[2]。模型實驗的波浪效果一方面由造波水槽及執行機構的本身結構及力學性質決定,另一方面由實驗環境能否準確地反映自然的海浪環境決定。為了提高實驗環境的準確性及可靠性,就必須不斷改善和提高造波技術[3]。近年來,國內外專家學者對實驗水池的建設投入了大量的研究工作,造波技術取得了長足的發展。從最初的直流電機驅動傳動機構進行機械式造波,之后的電液模擬量伺服系統的應用,到現在的交流伺服電機運動控制技術的開發,造波設備越來越能夠真實地模擬各種海況,為實驗提供更科學的依據。伺服電機驅動具有響應速度快、控制精度高的特點[4],其得到的波浪更接近于目標波浪,可以提供更好的實驗環境。1996年日本長崎研究所利用伺服電機運動控制技術,設計了適航性水池中的多向不規則波造波機控制系統[5]。2001年荷蘭把CAN總線技術和Ethernet/IP網絡技術與伺服控制器結合在一起建造了MARIN水池網絡化多向不規則波造波機[6]。2006年,大連理工大學開發了國內第一臺采用伺服電機作為動力源的可模擬斜向不規則波的波浪水池造波設備[7]。我國702研究所建立的實驗水池也是采用了交流伺服電機控制方式[8]。然而國內外造波機存在共同的缺陷,即特定的頻率范圍內波高無法保持不變,波高精確控制問題依舊是現有造波技術的瓶頸。因此,造波水平的差距主要表現在對造波機的精確控制上。本文采用的造波控制系統在伺服驅動器內部閉環控制的基礎上,還增加了基于PID(proportion integration differentiation)算法的波高和頻率閉環控制,能夠有效地提高造波精度。
本文以楔形板在垂直方向做上下往復運動產生規則波為造波需求完成造波運動。首先利用造波控制理論計算出造波機楔形板的運動參數;然后由運動控制器根據運動參數計算出楔形板的控制參數,控制伺服電機驅動楔形板運動;再利用PID負反饋算法提高波高與周期的精度;最后上位機界面通過TCP(transmission control protocol)與運動控制器通信,實現對現場的實時監測和控制。仿真數據結果表明,采用PID算法比動力學模型的造波效果更好,精確度更高。
1 造波機系統參數計算
本文造波系統的實驗水槽尺寸為10 m×1 m×0.5 m,距離地面0.4 m,造波參數為波高0~10 cm,頻率0.5~3 Hz。造波機構由楔形塊、固定支架組成。通過楔形塊的垂直上下運動,產生波浪,如圖1所示。圖中水深為h,楔形塊在水面下垂直深度為b,楔形塊最大移動距離為Y,中心線距離波面的距離為a。

圖1 沖箱造波機結構示意圖Fig.1 Structural diagram of wave maker with striking box
本文以規則波造波理論為基礎,計算造波機系統參數。根據造波理論需要得到波高和頻率,反向計算沖箱式造波系統的設計參數。楔形塊的運動方程是通過推板式造波系統的設計參數推導得出[8],主要包括水動力學系統A,波長L,波數k,楔形塊移動最大行程Smax,最大運動速度Vmax,最終得到楔形板最大行程對應的位移x和速度v。具體的造波設計參數算法流程如圖2所示。

圖2 造波機設計參數計算流程圖Fig.2 Flow chart for the calculation of wave maker design parameters
由上述流程得到的楔形板最大行程對應的位移和速度,不僅給造波機系統運動結構的設計、伺服驅動系統的選型及動力學模型的建立提供了參考,而且給后續的控制算法的數學推導和仿真分析提供了所需的數據支撐[3]。
2 造波機控制系統
2.1造波機運動控制系統組成
造波機控制系統由工控機、PLC控制器、伺服驅動器、伺服電機、楔形板和浪高傳感器等構成。硬件系統設計如圖3所示。

圖3 基于交流伺服電機的下壓式造波機控制系統框圖Fig.3 Block diagram of the control system of the downstroke wave maker based on the AC servo motor
系統采用西門子S7-200 Smart PLC及EM235作為運動控制器和模擬量采集模塊,主要負責接收上位機控制指令,運行下位機造波控制程序,采集傳感器信息,實現造波算法。伺服控制器采用西門子V90,功率為0.75 kW,集成PROFINET通信,可實現用戶數據、過程數據和診斷數據的實時傳輸,完成驅動任務[9]。伺服電機為S-1FL6低慣量型電機,功率為0.75 kW,轉速為3000 r/min,2500線增量編碼器,主要驅動楔形塊的上下位移和速度。上位機通過TCP/IP與PLC直接通信,利用組態王軟件對系統整體狀態進行控制。
具體工作方式為工控機以TCP/IP通信方式給PLC控制器下發指令,PLC控制器通過伺服驅動器驅動伺服電機運動,并轉換為楔形塊的上下運動。伺服驅動器一方面通過PROFINET總線獲得PLC發送的電機轉速和位移信息,另一方面,通過檢測的電機編碼器信號進行負反饋調節。電機的狀態信號經PLC采集后發送給主控計算機,由主控計算機顯示電機工作狀態。浪高傳感器將采集的浪高信號經浪高儀濾波、放大、去噪處理后發送給模擬量采集模塊,PLC控制器再利用PID算法對運行參數進行調整和修正。
2.2 PID控制算法
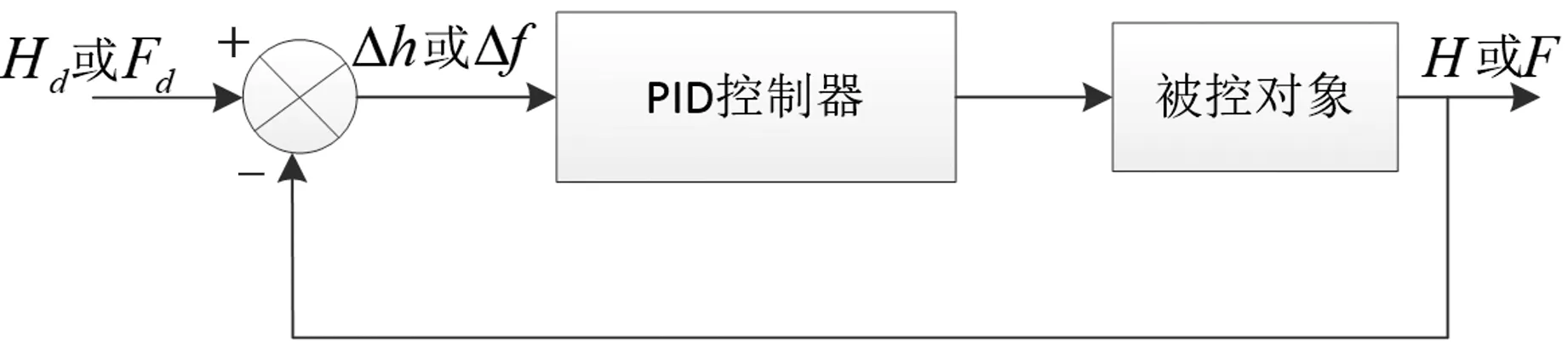
圖4 PID控制器結構Fig.4 PID controller structure
為了提高造波的準確性,采用PID控制器對被控對象進行控制。這是一種線性控制器,通過對控制系統中偏差的比例(P)、積分(I)、微分(D)進行線性組合來重新調整控制量[10-11]。圖4為PID控制器結構圖,控制器的輸入為需要的波高Hd或頻率Fd,以及浪高傳感器采集的實際波高H或頻率F,求得偏差Δh和Δf,然后利用PID閉環控制算法得到被控對象位移和速度,并再次反饋給輸入,不斷地調整和修正參數。
PID算法的數學表達式為:
(1)
其中:kp為比例放大系數;Ti為積分時間常數;Td為微分時間常數,其值應根據造波機的實際工作情況來確定。通過不斷的造波實驗來修正系數,以找到最合適的數值對造波機進行控制。
2.3 上位機軟件設計
造波機上位機界面采用組態王軟件,通過TCP與PLC控制器通信。組態王軟件具有適應性強、開放性好、易于擴展、經濟、開發周期短等優點,不但可以實現對現場的實時監測與控制,且在自動控制系統中具有完成上傳下達、組態開發的重要作用[12]。本文的組態界面主要包括湊譜、控制界面、波形采集顯示和數據處理。
湊譜可根據第1節中的系統模型函數,輸入波浪周期、波高、水深等參數,計算出波浪控制數據,如圖5所示。控制界面可用作控制造波機的啟停和故障檢測,標定PID系數,如圖6所示。波形采集界面可通過浪高儀采集波浪數據,并實時顯示在上位機界面上。數據分析界面對采集的數據點數進行分析,如通過統計分析得到規則波的波個數、平均波高、最大波高和平均周期、最大周期等[13]。
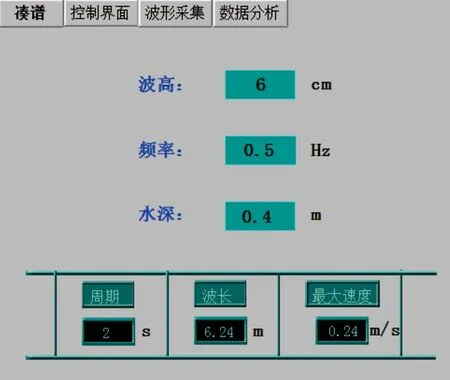
圖5 湊譜Fig.5 Gater spectrum

圖6 控制界面Fig.6 Control interface
3 實驗驗證
為了驗證主動造波功能,選定在0.4 m水深的波浪水槽內做規則波運動,設定波高為6 cm,頻率為0.5 Hz。圖7是在實驗水槽內做的規則波運動,從圖中可以看出,波形接近正弦波。

圖7 實驗水槽規則波運動Fig.7 Regular wave motion in the experimental flume

圖8 實驗數據對比Fig.8 Comparison of experimental data
另外,我們運用Matlab軟件分別對系統參數計算方法和PID算法對造波的波形進行對比。圖8為3種波形的仿真數據的比較,黑色曲線y1為標準正弦波波形,藍色虛線y2是由水動力傳遞函數得出的波形,紅色曲線y3為PID算法得到的波形。從圖中可以看出,規則波總體效果較好。在2 s之前,y3波形呈無規律變化;2 s之后,造波效果越來越接近標準波,而y2波形在幅度和周期上與標準波誤差越來越大,原因是隨著周期的增加非線性的影響也在增加。因此,在造波中采用PID控制算法可以滿足精度要求。
4 結論
本文對沖箱式造波系統的造波原理進行了理論分析,并對造波機的控制系統進行了詳細介紹。該系統在控制方式上利用PLC控制器通過伺服驅動器驅動伺服電機運動;在造波控制算法上,用PID負反饋算法代替原來的水動力學算法,使產生的波浪更接近于理論的目標波浪,從而提高了控制精度,為波浪實驗提供了更精確的條件。
本文設計的造波機主要是針對規則波,對于非規則波的研究,還要進行大量的實驗驗證。另外,由于在水槽尾部沒有設計消波裝置,隨著時間的增加,波形會受到二次反射波的影響。因此,以后在此基礎上,還要進行大量的非規則波分析實驗,以及對造波系統進行改進,實現造波機的吸收功能。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
