基于最小二乘的全局信息融合方法在分布式POS中的應(yīng)用
2020-06-13 05:42:56莫明崗孫兆偉鄒思遠
中國慣性技術(shù)學報 2020年1期
莫明崗,孫兆偉,鄒思遠
(1.哈爾濱工業(yè)大學航天學院,黑龍江哈爾濱 150001;2.北京自動化控制設(shè)備研究所,北京 10074)
機載多任務(wù)航空遙感系統(tǒng),是目前空基對地觀測的重要發(fā)展方向。機載多任務(wù)航空遙感系統(tǒng)要實現(xiàn)超高分辨率成像,需獲取各載荷的高精度運動參數(shù),進行運動補償[1]。位置姿態(tài)測量系統(tǒng)(Position and Orientation System,POS),可以為成像載荷提供位置姿態(tài)運動信息,是目前機載對地觀測系統(tǒng)中獲取遙感載荷安裝點運動參數(shù)的主要手段[2,3]。
隨著集成多任務(wù)成像載荷的新型超高分辨率航空遙感系統(tǒng)的發(fā)展,柔性基線多節(jié)點運動信息測量有了新的需求,如陣列天線SAR(Synthetic Aperture Radar)性能越高,所需天線數(shù)越多,基線越長。受陣風、平臺機動等多源擾動影響,柔性長機翼產(chǎn)生多模撓曲變形和顫振耦合運動,部分節(jié)點的最大振幅可達米級、撓曲變形角高達10 °左右,柔性基線效應(yīng)顯著。單節(jié)點運動信息測量問題,變?yōu)槿嵝曰€多節(jié)點運動信息和相對空間信息測量的新問題[4,5]。傳統(tǒng)單POS已經(jīng)無法滿足不同載荷安置點的高精度運動參數(shù)測量需求。因此,為滿足各節(jié)點間相對位置測量精度需求,多節(jié)點柔性基線分布式POS信息融合研究成為制約航空遙感發(fā)展的關(guān)鍵技術(shù)。
分布式POS 系統(tǒng),通常是在飛機機腹安裝高精度主POS,它是采用高精度IMU(Inertial Measurement Unit)和GPS(Global Positioning System)進行數(shù)據(jù)融合輸出高精度的時空基準信息,為分布在機翼兩側(cè)的子IMU提供基準信息,進而通過主子傳遞對準獲得子IMU對應(yīng)節(jié)點處的高精度運動參數(shù)[4]。與高精度單POS比較,柔性基線分布式POS由單節(jié)點測量變?yōu)槎喙?jié)點測量,單個IMU增加為多個IMU,剛性基線變?yōu)槎嗉壢嵝曰€。柔性基線效應(yīng)導(dǎo)致各節(jié)點運動信息相互之間動態(tài)時變,且狀態(tài)不確定,現(xiàn)有剛性基線高精度POS信息融合方法無法用于柔性基線多節(jié)點時空基準信息精確測量[5]。
通過分布式POS的局部信息融合,即主子傳遞對準,可以獲得柔性基線各節(jié)點的局部信息融合值。傳統(tǒng)的主子傳遞對準主要集中在建立近似撓曲變形模型及優(yōu)化估計方法兩方面進行研究。文獻[6]基于二階馬爾科夫建立了近似的柔性基線模型,估計撓曲角的隨時間的變化,進而實現(xiàn)運動補償;文獻[7]基于非線性UKF(Unscented Kalman Filter)濾波估計,提出自適應(yīng)后處理估計方法,提高估計精度,實現(xiàn)高精度主子運動信息補償;文獻[8] 基于EKF(Extended Kalman Filter)提出一種雙濾波器后處理估計方法,用于提高非線性系統(tǒng)估計精度;文獻[9] 基于CDKF(Central Difference Kalman Filter)提出一種雙濾波器平滑估計方法,用于分布式POS后處理研究。除此之外還有大量的關(guān)于非線性估計方法提高分布式POS傳遞對準精度的研究。
然而現(xiàn)有傳遞對準濾波估計的目的是對某一局部節(jié)點進行狀態(tài)估計,得到的結(jié)果僅是針對某個節(jié)點進行時間維的估計,利用了節(jié)點時間維的相關(guān)性。而對于整個柔性基線分布式POS系統(tǒng),機翼形變是連續(xù)的,安裝在機翼上的遙感載荷在同一時刻它們的運動信息可被認為相互關(guān)聯(lián),現(xiàn)有主子傳遞對準方法未對節(jié)點空間上運動信息的相關(guān)性、連續(xù)性進行充分研究。所以為進一步充分利用柔性機翼各子節(jié)點運動信息的連續(xù)相關(guān)性,克服柔性基線效應(yīng),有關(guān)擬合的方法可以考慮用來解決該問題。
本文在主子傳遞對準的基礎(chǔ)上,利用高精度主POS和各節(jié)點子IMU局部狀態(tài)估計后的所有觀測信息,基于最小二乘正交多項式擬合,充分利用各子節(jié)點的空間信息相關(guān)性,獲得系統(tǒng)更高精度、高可靠的全局估計值,提高分布式POS各子IMU的測量效果。最后通過地面模擬實驗驗證該方法的有效性。
1 機翼柔性基線模型建立
飛機在航行時,機翼的彈性振動分為兩種,一是飛機在機動時產(chǎn)生的撓曲變形,二是機翼結(jié)構(gòu)受空氣動力作用產(chǎn)生顫振。在飛行過程中,機翼周圍會產(chǎn)生高速流體,流體具有粘性及壓縮性,使機翼產(chǎn)生變形,變形導(dǎo)致機翼所受氣動載荷分布產(chǎn)生變化,載荷分布的變化又會使機翼產(chǎn)生幾何變形。氣動載荷與機翼變形的相互作用,會引起機翼一定條件下的連續(xù)顫振。
柔性機翼會產(chǎn)生多階模態(tài)運動疊加而成的非線性撓曲變形和顫動,其中高階模態(tài)振幅較小,且隨機性強,因此柔性基線撓曲運動建模時,主要考慮低階模態(tài)的影響。根據(jù)飛機氣動特性和結(jié)構(gòu)參數(shù),結(jié)合分布式POS布局及柔性基線動力學頻譜特性,基于氣動彈性動力學理論,采用運動模態(tài)疊加方法,建立柔性基線多模態(tài)撓曲運動復(fù)合模型。
對于大變形機翼彈性變形角,考慮飛機航行時所受載荷,機翼的振動及彈性變形主要是繞機體y軸,即在機翼表面垂直于機翼展向的坐標軸[10],所以在分布式POS信息融合中,本文僅考慮繞y軸的彈性變形角θy。將機翼模擬近似為懸臂梁,其撓曲變形[11]可描述如圖1所示。其中,x軸沿機翼展向方向;y軸沿機翼表面垂直于機翼展向的方向;z軸為垂直于機翼表面向上。

圖1 機翼受均布載荷撓曲變形示意圖Fig.1 Deformation of the wing under uniform load
基于彈性力學模態(tài)疊加理論[11],機翼撓曲運動表示如式(1)所示:

其中,x是機翼展向坐標,uy(x,t)是機翼繞y軸的彎曲變形;n代表桿臂的n階模態(tài);ψi(x)是第i階模態(tài)的振型函數(shù),qi(t)是第i階模態(tài)的模態(tài)坐標。繞y軸的撓曲變形角可表示為:

可用模態(tài)坐標分析機翼顫振[10],描述為:

其中,ζqi是模態(tài)阻尼系數(shù);ωqi是模態(tài)頻率;fqi是廣義外力。機翼結(jié)構(gòu)受空氣擾動產(chǎn)生的廣義外力fqi,一般可基于擾動信號的頻率范圍來確定,大氣擾動的頻率一般在十幾~幾十赫茲左右[1]。機翼隨時間的振動可以看作機翼受外力產(chǎn)生顫振,由于飛機在正常飛行過程中,模態(tài)阻尼系數(shù)均為小阻尼震顫ζqi< 1,所以模態(tài)坐標函數(shù)可視為欠阻尼二階系統(tǒng)。飛機在巡航過程中,載荷近似為均布載荷,廣義外力表示為fqi,可近似為一種階躍激勵,得模態(tài)坐標函數(shù)為:

機翼i階模態(tài)對應(yīng)振型函數(shù)表示如下[12]:

其中,l為單側(cè)機翼總長,βi為待定系數(shù),可通過ANASYS分析及振型曲線擬合得到。
飛機在航行中,受到的大氣湍流等外部擾動的頻率與一階模態(tài)頻率近似,遠小于震顫頻率,本文取一階彎曲模態(tài)建立機翼撓曲模型錯誤!未找到引用源。。由于航行器在巡航時,機翼可近似為懸臂梁,機翼所受升力可視為均布載荷,用Q表示。振型函數(shù)方程可表示為:

其中,EI為機翼抗彎剛度。
則繞y軸變化取其微分形式為:

將式(4)(7)代入式(2),撓曲變形角近似表示為:

2 基于最小二乘正交多項式全局信息融合算法
針對上述建立的機載柔性基線彎曲變形角模型,可以看出,撓曲變形角是關(guān)于時間和空間的二元函數(shù),由時間維的顫振和空間維的彎曲組成。分布式POS通過主子傳遞對準,各子節(jié)點可以充分利用時間上的相關(guān)性,分別獲得每個子IMU對應(yīng)節(jié)點的隨時間變化的運動參數(shù)。但通過主子傳遞對準,只能獲得離散的子節(jié)點的運動信息,且并未充分利用柔性機翼各子節(jié)點的連續(xù)空間相關(guān)性。為了進一步提高精度,獲得連續(xù)的節(jié)點運動信息,采用基于最小二乘的正交多項式擬合算法進行分布式POS全局信息融合,提高各節(jié)點的位置速度姿態(tài)測量精度。
設(shè)經(jīng)主子傳遞對準后各子IMU相對運動參數(shù)為 離散序列{f(x,t)}m×p,其中x表示子節(jié)點沿機翼展向 的空間坐標,t表示時間,m表示節(jié)點個數(shù),p表示采樣總時間。根據(jù)機載柔性基線各節(jié)點變形相關(guān)性,f(x,t)間接體現(xiàn)了撓曲角的變形規(guī)律,全局信息融合方法主要解決柔性基線多階模態(tài)運動疊加導(dǎo)致的撓曲角的不確定性,為提高各節(jié)點的測量精度,融合方法就要無限逼近實際撓曲角變形所帶來的載荷運動規(guī)律。
正交多項式擬合是基于最小二乘擬合原理的一種函數(shù)逼近方法。不要求擬合函數(shù)y=g(x)經(jīng)過所有點(xi,f(xi,tj)),而只需要在給定點xi上殘差δi=g(xi)-yi按照某種標準達到最小,通常以歐式范數(shù)為衡量標準,即最小二乘擬合,其中,i表示桿臂上第i個子節(jié)點,j表示第j時刻。針對所有時刻的分布式 POS 所有節(jié)點運動信息,進行正交多項式擬合。根據(jù)給定節(jié)點x0,x1,…,xm及權(quán)函數(shù)ρ(x)> 0,推導(dǎo)多項式{Qn(x)},其中n≤m,用遞推公式表示Qk(x),即:

其中,Qk(x)是首項為1的k次多項式,
根據(jù)Qk(x)的正交性,有:

其中,權(quán)函數(shù)ρ(xi)根據(jù)子節(jié)點與主POS距離確定,距離越遠,柔性基線效應(yīng)影響越顯著,權(quán)值越小。根據(jù)距離進行歸一化,最終確定權(quán)值大小。
根據(jù)式(9)(10)逐步求得Qk(x),其相對應(yīng)系數(shù)可表示如下:

逐步把a*k·Qk(x)累加到S(x)中,最后可求得擬合函數(shù)為[13]:

本文將分布式POS各個子系統(tǒng)定義為相應(yīng)節(jié)點x0,x1,…,xm,對每個節(jié)點對應(yīng)的基線值及姿態(tài)角進行正交多項式擬合,充分利用各個子節(jié)點的信息連續(xù)相關(guān)性,得到更高精度的基線及姿態(tài)角。
3 仿真實驗驗證
分布式POS多個子IMU傳遞對準后進行多源信息融合,為充分利用各子POS的時間空間相關(guān)性,進行多源全局信息融合,進一步提高分布式POS的測量精度,本節(jié)擬基于上述模型及融合方法,開展分布式POS全局信息融合地面模擬實驗。
實驗技術(shù)方案如下:將高精度激光主IMU固定安裝在“機身”處。沿機翼模型展向安裝低精度子IMU。首先進行分布式POS主子傳遞對準,再將主子傳遞對準結(jié)果進行全局信息融合。對所有子IMU對應(yīng)節(jié)點的基線結(jié)果進行最優(yōu)擬合,從擬合結(jié)果中提取擬合后各子IMU的運動參數(shù)。最后對擬合結(jié)果進行誤差分析。
(1)試驗條件
①分布式模擬實驗平臺:柔性機翼模型、大理石平臺、轉(zhuǎn)臺。如圖2所示。
②POS系統(tǒng)方面:一套高精度激光POS系統(tǒng);一套較低精度的光纖POS系統(tǒng),記為2#光纖POS;三個MEMS,分別記為1#MEMS、2#MEMS、3#MEMS;一套高精度光纖IMU,及其配套PCS用于存儲IMU數(shù)據(jù),以高精度1#光纖POS的處理結(jié)果作為基準。其中,陀螺及加速度計精度參數(shù)如表1所示。各設(shè)備水平距離示意圖如圖3所示。

表1 陀螺及加速度計精度參數(shù)Tab.1 The parameter of the gyroscope and accelerator

圖2 分布式模擬實驗平臺Fig.2 Simulation experiment platform of distributed POS
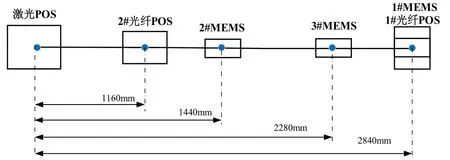
圖3 模擬機翼設(shè)備安裝示意圖Fig.3 Schematic diagram of wing equipment installation
(2)實驗步驟
①在模擬機翼機身處,安裝激光IMU,靜止安裝于轉(zhuǎn)臺,可以降低抖振影響;在第二節(jié)點處安裝2#光纖 IMU;MEMS精度較低,體積小,作為子傳感器分布在機翼各節(jié)點,在第三節(jié)點處安裝2#MEMS IMU,第四節(jié)點處安裝3#MEMS IMU,1#MEMS IMU與1#光纖IMU固連安裝于第五子節(jié)點處。其中1#光纖IMU作為基準。1#MEMS IMU與光纖IMU提前做好標定實驗,已知測量系統(tǒng)的安裝誤差角。
②所有傳感器安裝完畢后,模擬機翼空載條件下靜止,然后將機翼末端用固定支架支撐,使機翼達到平直狀態(tài)。保持靜止5分鐘。
③將支撐支架撤走,使模擬機翼放置為自然垂下狀態(tài),靜止5分鐘,并記錄千分尺數(shù)據(jù)。然后分別在機翼末端分別放置1 kg、2 kg、3 kg、5 kg砝碼,各靜止5分鐘后記錄千分尺數(shù)據(jù)。
④最后取走砝碼,待模擬機翼在空載條件下靜止,手動加載兩次瞬時脈沖外力,使之自然震顫至靜止。
⑤試驗結(jié)束,關(guān)閉實驗設(shè)備。實驗時間約1 h。(3)試驗處理及結(jié)果
首先,激光IMU作為主POS,激光IMU與差分GPS進行組合導(dǎo)航,獲得主POS的位置速度姿態(tài)數(shù)據(jù),分別對各子IMU進行主子傳遞對準。將子IMU的運動信息與主POS的運動信息矢量相減,求得對應(yīng)節(jié)點基線距離及橫滾姿態(tài)信息。本文主要考慮機翼繞y軸的變形。
其次,主子傳遞對準后,分布式POS系統(tǒng)基于提出的融合方法進行全局信息融合,對多個子POS信息進行空間維正交多項式擬合。由于機載干涉SAR主要需要基線測量信息進行相位補償,且繞y軸的撓曲變化直接影響基線及橫滾角測量精度,又因為在地面演示試驗及飛機飛行過程中,我們主要考慮機翼沿桿臂z軸的變形,即垂直于桿臂水平面的方向,所以本文分布式POS測量系統(tǒng)主要以基線和水平姿態(tài)橫滾角作為評估對象。
各子IMU對應(yīng)節(jié)點處的基線全局融合結(jié)果如圖4所示,其中x軸表示時間,y軸是模擬機翼的水平坐標,z軸是分布式POS基線測量結(jié)果隨時間及桿臂水平坐標的變化。
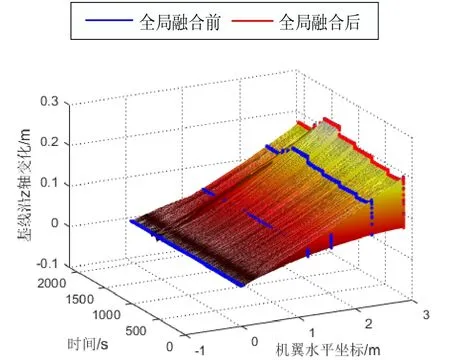
圖4 分布式POS各節(jié)點基線全局融合時空結(jié)果圖Fig.4 The results of baseline global fusion in each node of distributed POS
取擬合后某一節(jié)點處的基線結(jié)果進行驗證。以1#光纖IMU傳遞對準后的的結(jié)果作為基準,評估MEMS1節(jié)點處(模擬機翼末端,由于桿臂影響,傳遞對準精度較低)擬合后結(jié)果,驗證時空擬合精度。MEMS1節(jié)點處基線誤差結(jié)果如圖5所示。基線誤差統(tǒng)計結(jié)果見表2。
根據(jù)實驗步驟,每次加入外部激勵不同,從自然垂放段進行統(tǒng)計分析。整個實驗分成八個階段,其中6、7段為動態(tài)振蕩,其他段為不同加載的準靜態(tài)情況。根據(jù)統(tǒng)計結(jié)果可以看出,經(jīng)過全局信息融合后,1#MEMS節(jié)點處的基線測量精度在x軸、y軸和z軸均有所提高。分別平均提高了1.893 mm、0.461 mm和2.183 mm。

圖5 MEMS1處節(jié)點基線誤差結(jié)果對比圖Fig.5 Comparison of baseline error results of the node at MEMS1

表2 MEMS1節(jié)點處基線誤差統(tǒng)計結(jié)果表RMS(10-3m)Tab.2 The results of the baseline error of the node at MEMS1
處理各子IMU對應(yīng)節(jié)點處的橫滾角的全局融合結(jié)果如圖6所示。以1#光纖IMU傳遞對準后的的結(jié)果作為基準,對MEMS1節(jié)點處的橫滾角誤差進行分析,融合前后誤差結(jié)果如圖7所示。MEMS1節(jié)點處橫滾角誤差統(tǒng)計結(jié)果如表3所示。
根據(jù)統(tǒng)計結(jié)果可以看出,經(jīng)過全局信息融合后,1#MEMS節(jié)點處的橫滾角測量精度均有所提高。在支撐階段,模擬機翼彎曲變形小,對角度影響較小,精度提高不明顯。統(tǒng)計模擬機翼有明顯變形階段的RMS值,橫滾角平均精度提高了0.023°。綜合整個實驗結(jié)果,可以看出該全局信息融合方法,在主子傳遞對準的基礎(chǔ)上,能夠充分利用所有子節(jié)點的運動信息連續(xù)相關(guān)性,有效提高分布式POS的測量估計精度。

圖6 分布式POS各節(jié)點橫滾角全局融合時空結(jié)果圖Fig 6.Global fusion results of roll at each node in distributed POS

圖7 MEMS1處節(jié)點橫滾角誤差結(jié)果對比圖Fig 7.The comparison of the results of roll erro of the node at MEMS1

表3 MEMS1節(jié)點處橫滾角誤差統(tǒng)計結(jié)果表RMS(°)Tab.3 The results of the roll error of the node at MEMS1
4 結(jié) 論
本文提出的基于最小二乘的全局信息融合方法,充分利用各子節(jié)點的信息相關(guān)性,獲得系統(tǒng)更高精度、高可靠的全局融合值,應(yīng)用于分布式POS傳遞對準后處理,可有效提高子IMU測量精度。地面仿真驗證,x軸、y軸、z軸基線精度平均提高了1.893 mm、0.461 mm和2.183 mm,水平姿態(tài)橫滾角精度平均提高0.023 °,提升了分布式POS測量性能。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
中華詩詞(2020年1期)2020-09-21 09:24:52
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00