主動式活塞體積管流量標準裝置階躍特性研究
2020-06-17 04:45:14張毅治張永勝于華偉
計測技術 2020年2期
關鍵詞:測量
張毅治,張永勝,于華偉
(航空工業北京長城計量測試技術研究所,北京100095)
0 引言
流量測量技術是伴隨著科技工業快速發展起來的應用型測量技術,應用于石油、天然氣等能源流體的貿易結算,也大量應用于工業過程控制、裝備的生產和研制等方面[1]。隨著科技的迅猛發展,動態流量的測量在產品的研發和生產過程中越來越重要[2-3]。
流量計的檢定或校準試驗過程,均是在穩態流量下進行,而流量計的實際工況往往比較復雜,可能在動態流量下工作,此時會產生動態效應的流量誤差。另一方面,流量計的動態特性需要測試并量化評定。例如,在某型發動機燃油流量調節裝置設計中,控制系統對燃油計量活門控制位移速度達到100 ms的量級,但是燃油調節裝置實際流量的變化速度和變化曲線情況并不清楚,即所使用流量計測量結果并不能真實反映流量的動態變化曲線。因此需要在動態流量下對流量計的計量性能進行相關的試驗研究。
航空工業北京長城計量測試技術研究所曾對文丘里管在脈動流量中的測量進行了理論分析[4-6],并使用主動式活塞體積管燃油流量標準裝置,對容積式刮板流量計和科里奧利質量流量計進行了非穩態流量試驗[7]。
為了進一步開展流量計的動態響應特性相關試驗,本文使用激光干涉儀對主動式體積管燃油流量標準裝置的活塞位移進行動態測量,分析該裝置的階躍流量特性,為未來優化裝置的傳動結構和伺服控制參數奠定基礎。
1 試驗裝置
主動式體積管燃油流量標準裝置是一種容積式流量標準裝置,依據相關規程[8-10],該裝置標準流量的擴展不確定度為U=0.05%(k=2)。該裝置主要由電機及驅動器、聯軸器、絲杠、導軌、體積管缸體及其活塞、閥門及管道、儲油箱、溫度傳感器、壓力傳感器、過濾器、伺服控制系統、數據采集系統、控制計算機等組成。工作時,控制系統發出指令,伺服器驅動電機旋轉,經聯軸器和滾珠絲杠帶動標準體積管的活塞移動并排除燃油,燃油經過控制閥門、被校流量計和過濾器后回到油箱,油箱里的燃油通過下游管道再回到標準體積管,與此同時,系統同步采集傳感器信號[11-12]。該裝置通過測量活塞的位移和對應的移動時間,得到標準瞬時流量。通常開展穩態下的流量試驗。
由于體積管缸體的截面積已知,本次試驗通過測量活塞的移動速度,可準確計算得到標準流量值,試驗原理如圖1所示。
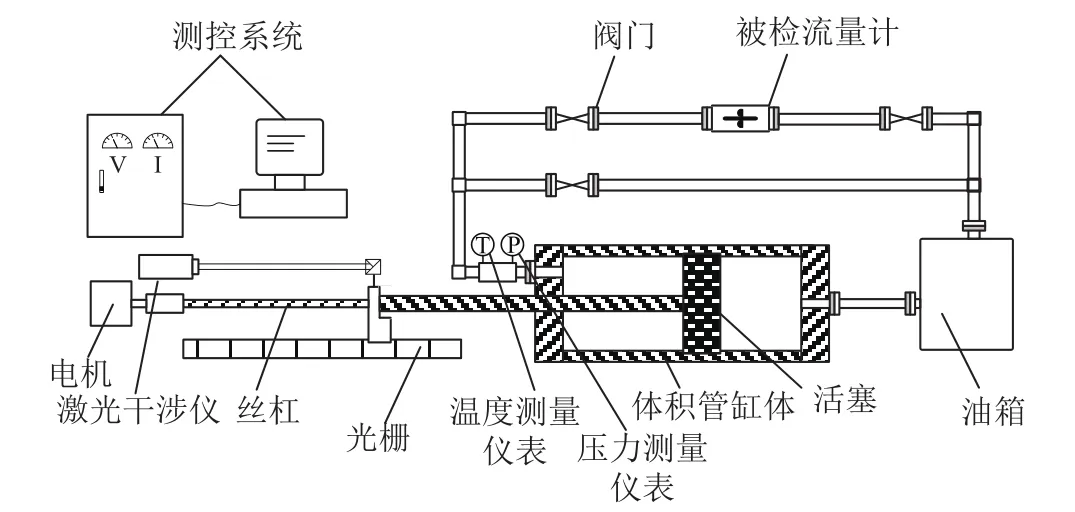
圖1 試驗原理圖
2 激光干涉儀
本次試驗過程中,使用激光干涉儀動態測量體積管活塞的移動速度。該激光干涉儀的技術指標如表1所示。
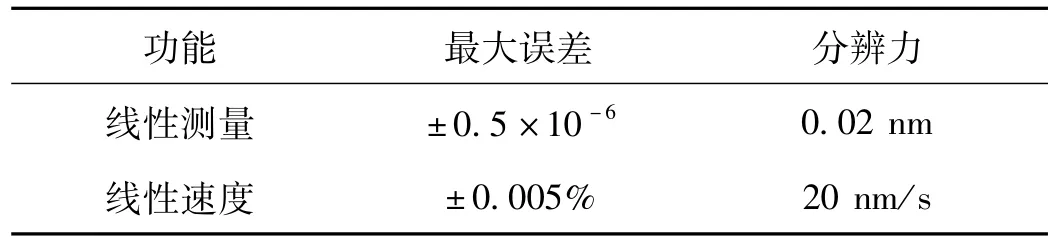
表1 激光干涉儀的技術指標
測量光路如圖2所示。光線1由激光干涉儀主機發出,進入分光鏡后被分成兩路光線:一路為測量光線2,另一路光為參考光線3;測量光線2在穿過分光鏡后到達后方的反射鏡,參考光線3在分光鏡處折射到上方的反射鏡;兩路光線分別被反光鏡反射回來,并匯合成一路干涉光4,最終返回到激光干涉儀主機,主機內的探測器可以監測到返回的干涉光,進而計算得到反射鏡的距離。
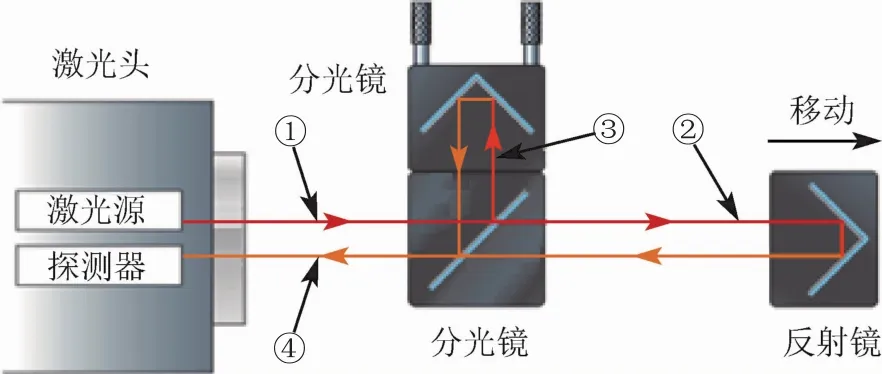
圖2 激光干涉儀的光路
試驗時,在活塞桿上固定安裝了分光鏡和反射鏡組,在地面固定激光干涉儀主機,對裝置活塞桿的位移進行動態測量。在測量過程中,反射鏡組隨著活塞桿直線運動,激光干涉儀主機保持靜止不動,發出光束并探測返回的干涉光束,計算得到活塞桿的位移。
主動式活塞體積管的活塞在啟動位置靜止,設定目標流量后開始啟動,目標流量分別設定為1,2,10,50,100,200,400,600,800 L/min,使用激光干涉儀動態測量活塞的位移,活塞位移對時間求導得到活塞的速度。設置激光干涉儀的采樣頻率為10000 Hz。
3 試驗結果
試驗結果如圖3~圖11所示。縱坐標為目標流量的百分比,方形標記為階躍起始點,圓形標記為裝置達到63.2%目標流量的時間點,三角標記為裝置穩定在(100±1)%目標流量的時間點。
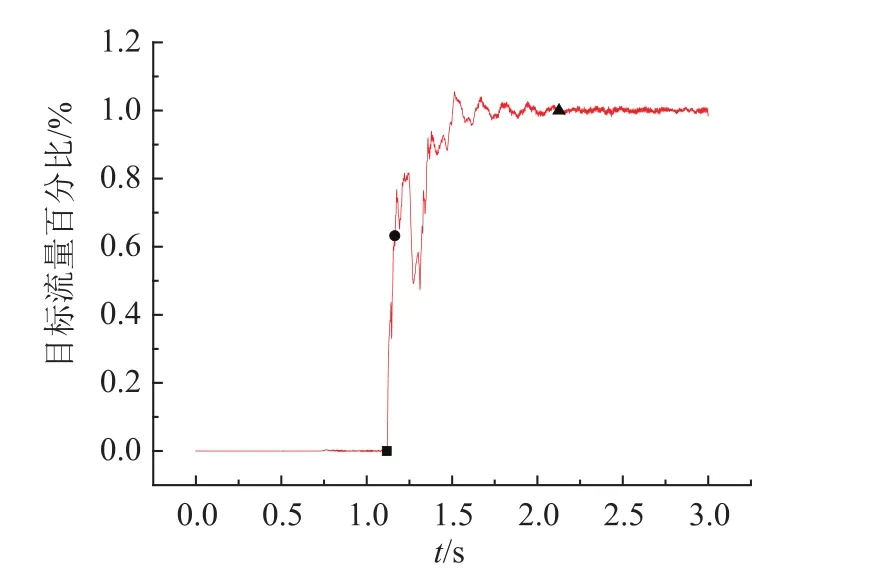
圖3 目標流量800 L/min的階躍響應
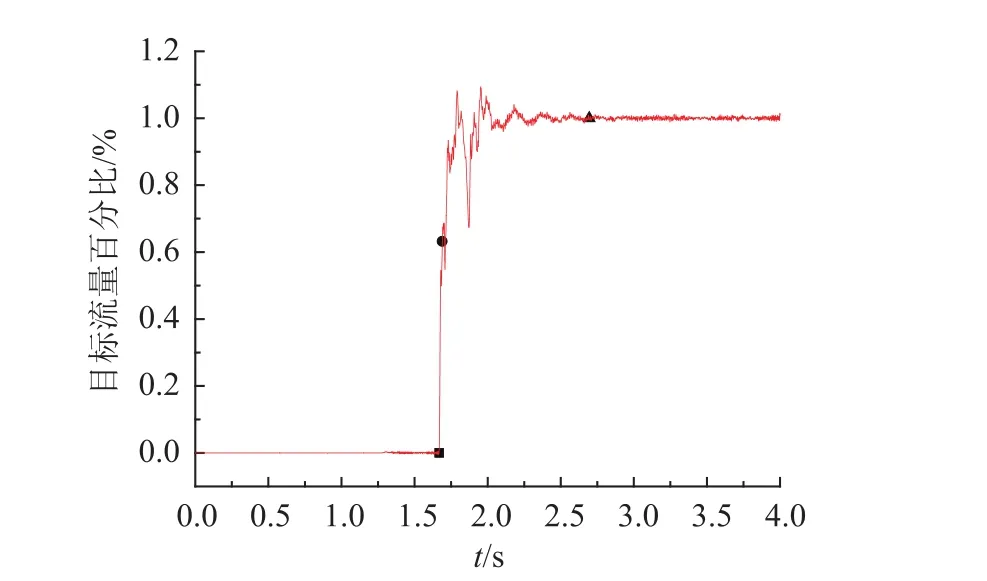
圖4 目標流量600 L/min的階躍響應
從圖3~圖11可以看出,主動式活塞體積管燃油流量標準裝置在100~800 L/min的階躍響應過程中存在明顯的振蕩和超調,而在1 L/min和2 L/min的階躍響應過程中,持續震蕩,穩定時間較長。不同階躍流量下的時間常數和穩定時間如表2所示。
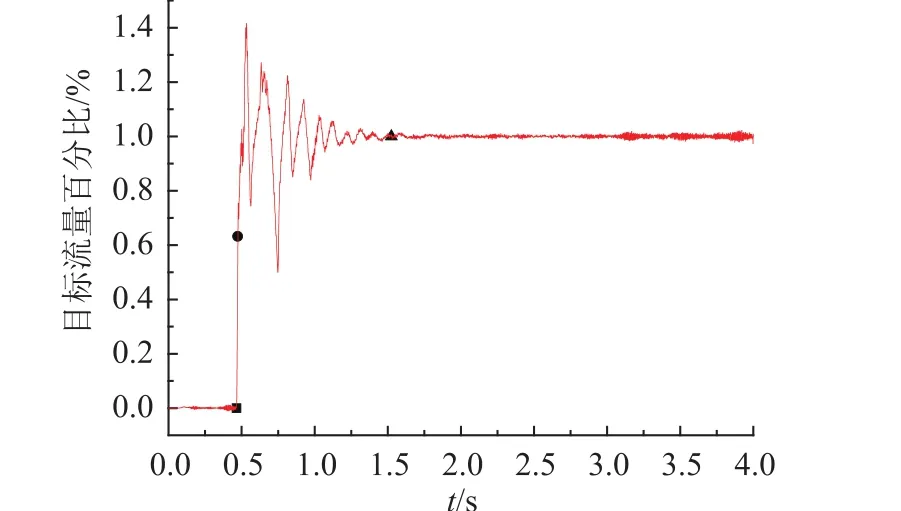
圖5 目標流量400 L/min的階躍響應
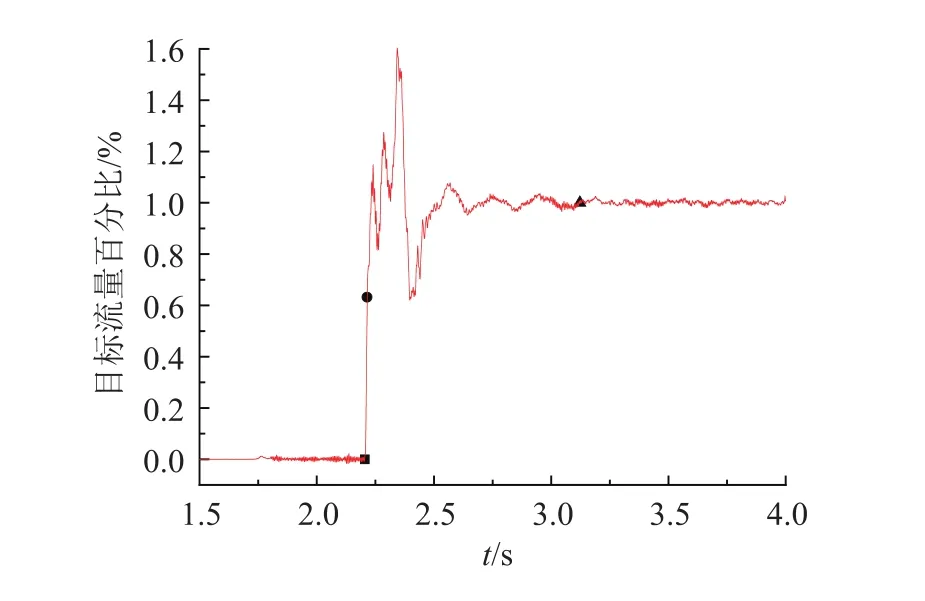
圖6 目標流量200 L/min的階躍響應
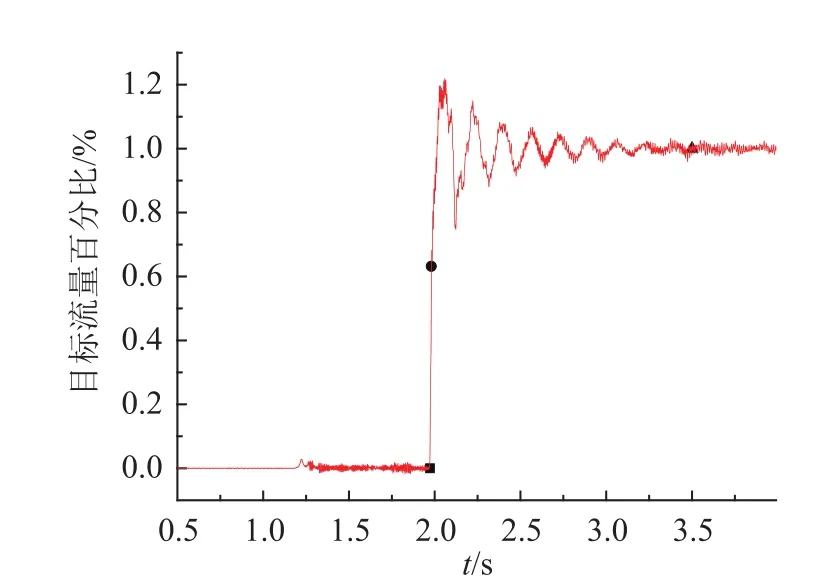
圖7 目標流量100 L/min的階躍響應
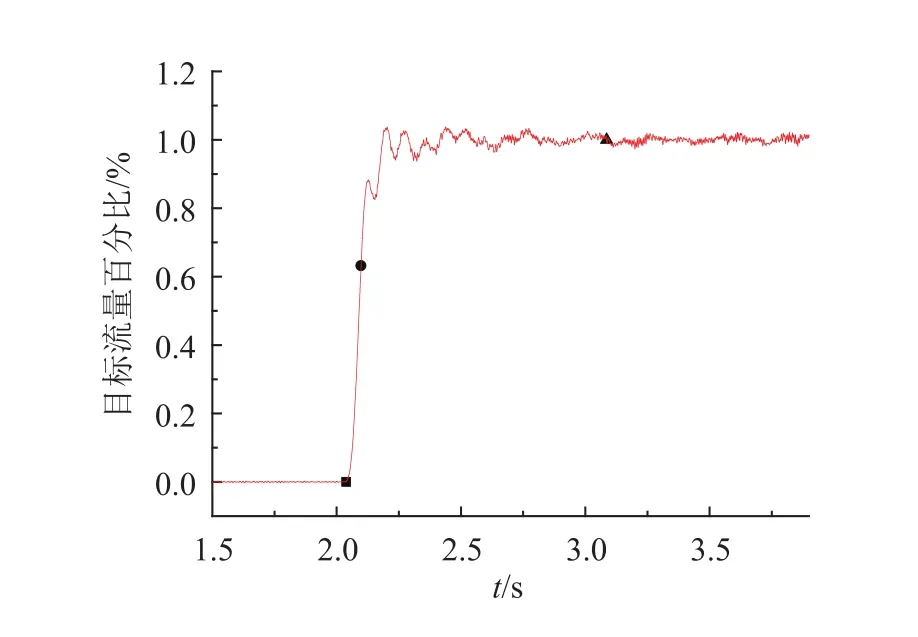
圖8 目標流量50 L/min的階躍響應
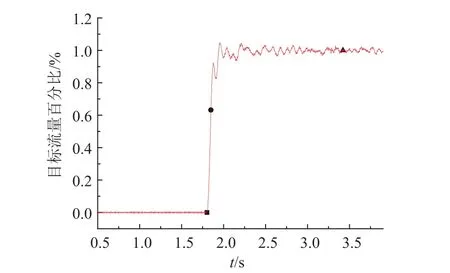
圖9 目標流量10 L/min的階躍響應
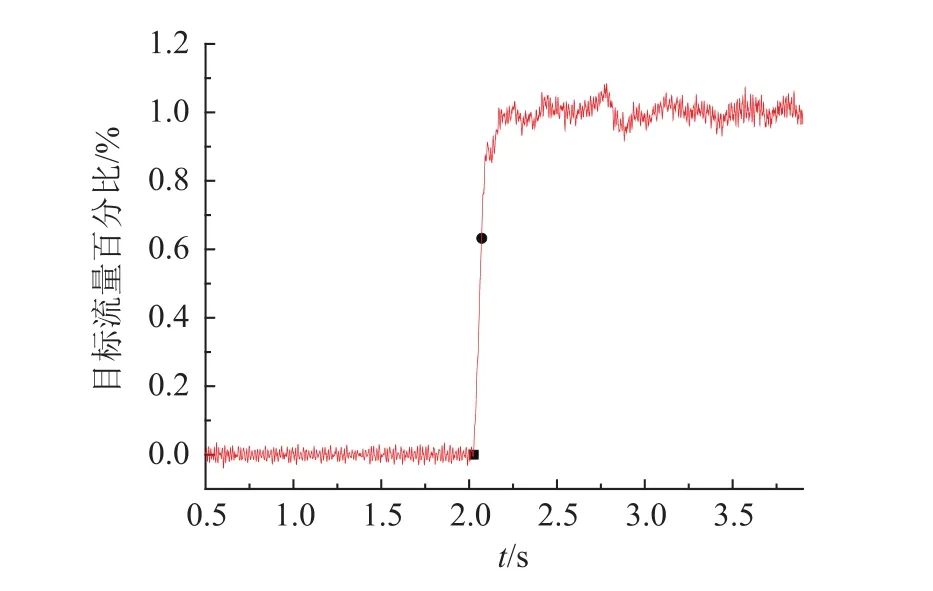
圖10 目標流量2 L/min的階躍響應
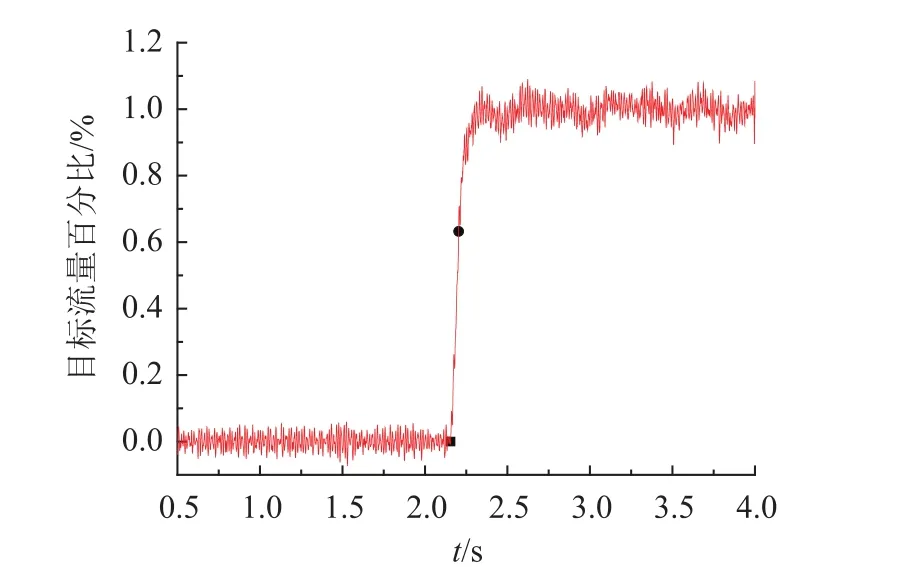
圖11 目標流量1 L/min的階躍響應
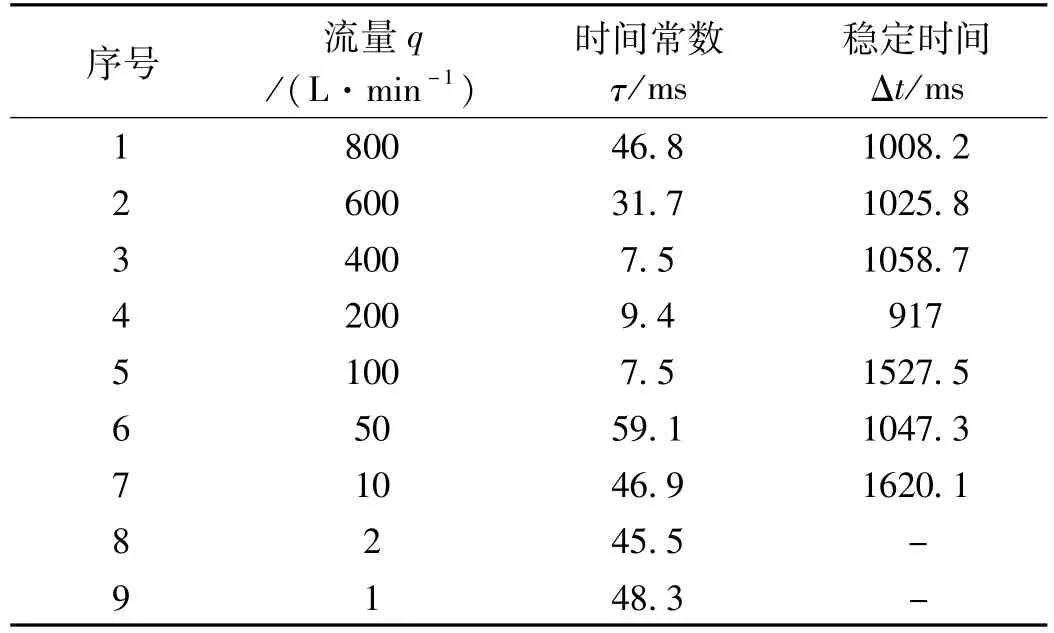
表2 不同階躍流量的時間常數和穩定時間
由圖12可以看出,主動式活塞體積管燃油流量標準裝置在各階躍流量下的時間常數在7~60 ms范圍內,穩定時間隨著流量的增大在1000 ms附近收斂。經初步分析,產生這種現象的原因主要是由裝置的機械結構和控制系統性能所導致的。結構方面,該裝置的伺服電機通過聯軸器、絲杠導軌和活塞桿驅動活塞運動,各部件之間的間隙或者微小形變吸收了部分驅動力。在控制方面,該裝置使用交流伺服電機產生流量源,裝置的控制系統通過PLC及電機伺服控制器控制電機達到指定轉速。控制過程中PLC輸出的脈沖頻率并非階躍曲線,而是先由零階躍到某一頻率,然后按照一定加速比率逐步增加到目標頻率,這個輸出過程可以保護電機防止突然過載,但是平滑了階躍曲線。
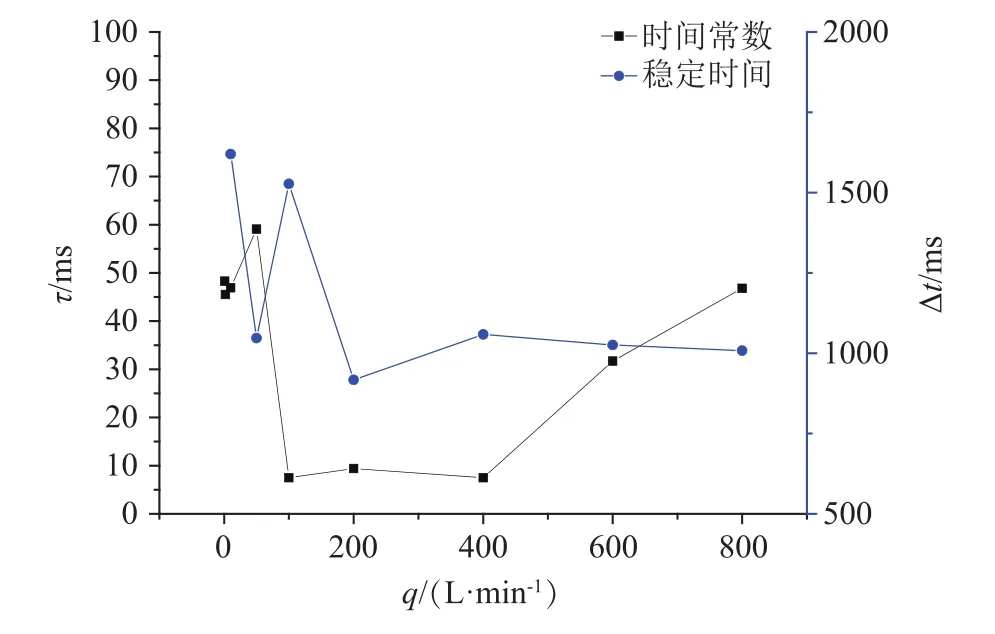
圖12 不同階躍流量的時間常數和穩定時間
4 結論
通過上述試驗,主動式活塞流量標準裝置從靜止分別到1 L/min至800 L/min的階躍流量的時間常數在7~60 ms范圍內,部分階躍曲線存在超調和振蕩的情況;在0~100 L/min,0~200 L/min,0~400 L/min的階躍流量的時間常數小于10 ms。
未來將優化主動式體積管流量標準裝置的傳動結構,并對PLC和電機伺服的控制參數進行調試,進一步優化裝置的階躍特性。在此基礎上,開展流量計在階躍流量條件下的誤差試驗,進行流量計動態特性研究。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
