軍用裝備環境試驗設備傾斜搖擺試驗臺校準方法
2020-06-17 04:45:16張毅文
計測技術 2020年2期
關鍵詞:信號
張毅文
(中國空空導彈研究院,河南洛陽471009)
0 引言
安裝在艦船、潛艇、水上飛機、坦克等軍用裝備上的各類光電、導航等設備及陀螺儀、平臺羅徑等儀器,其所處海上或陸地的工作狀態常為頻率較低的傾斜或搖擺力學環境,這類特殊的力學環境會對各部件產生附加的離心力極易引發各部件工作狀態失常。為了保證在傾斜和搖擺狀態下設備的可靠性、穩定性和結構的完好性,對性能易受到影響的電工電子產品或具有旋轉運動和重力不平衡運動系統的產品,要求按照國軍標等相應環境試驗標準進行傾斜和搖擺環境試驗,從而評估武器裝備在此類力學環境下的實際性能指標。
傾斜搖擺試驗臺是供搖擺或傾斜與搖擺綜合試驗用的試驗設備。主要通過模擬海上環境條件下的運動狀態,使試件在其最大試驗載荷下穩定地保持在所規定的位置上,不發生明顯的晃動和漂移,并能模擬國家標準和國家軍用標準規定的嚴酷度,實現艦船儀器儀表的環境模擬試驗、慣性導航設備的動態性能測試、光電跟蹤穩定精度測試和GPS導航系統的精度試驗,光學系統等儀器、設備的動態環境模擬試驗,也可以用于減搖水艙等設備的工作維修。
目前,國標、國軍標以及海軍標都有相應的傾斜搖擺試驗標準,如GB/T2423、GJB150等。雖然從上世紀80年代開始,各個標準即對傾斜搖擺試驗的嚴酷等級和試驗設備的性能指標有詳細要求,但受到校準方法和校準儀器限制,國內開展傾斜搖擺試驗臺校準設備的研制、校準方法的研究相對較晚。為進行傾斜搖擺試驗的搖擺試驗臺制定相應的校準方法,既可以保證試驗結果的準確可靠,又可以滿足艦船、潛艇、水上飛機等裝備上的各類設備的生產、維護和試驗的需求[1]。
1 總體技術方案
傾斜搖擺試驗臺多是模擬安置在艦船、潛艇、水上飛機、航母等平臺上的機械、電工電子產品經受風浪環境的試驗裝置,產生包括縱傾、橫傾、縱搖、橫搖、首搖、縱蕩、橫蕩、垂蕩6個自由度運動及其相互耦合運動。試驗臺可以做單一方向運動,也可以做復合運動,考慮到目前復合運動測量用的傳感器的量值溯源無法實現,所以本文針對單一方向進行研究。由于國內目前試驗臺模擬產生的風浪試驗波形多為不同幅度和不同周期的正弦波,因此傾斜搖擺試驗臺的標定方法為通過測試單一自由度的正弦角運動/線運動的分項指標來體現試驗臺的精度指標。
“橫傾/縱傾”是指試驗臺繞縱軸/橫軸旋轉,并停止在一定角度位置靜止不動,需要研究的參數是試驗臺從零位傾斜到一定位置后靜止的靜態傾斜角度;“橫搖/縱搖”是指試驗臺繞縱軸/橫軸以一定周期往復(正弦)擺動,需要研究的參數是往復(正弦)擺動時的試驗臺與鉛垂線方向夾角的角度幅值、周期及波形失真度。此類動態/靜態的傾斜角度測量需要使用傾角傳感器實現,并輸出角度-時間信號至數據采集處理系統。“艏搖”是指試驗臺繞鉛垂軸的往復(正弦)搖首振蕩,需要研究的參數有正弦轉動角度的幅值、周期及波形失真度。此類動態轉角的測量需要使用轉動角速度傳感器實現,并輸出角速度-時間信號至數據采集處理系統,積分計算后得到轉動角度信號(如圖1所示)。
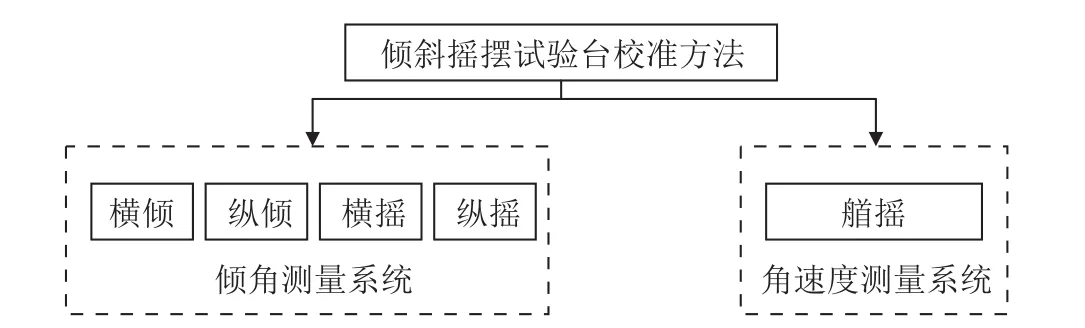
圖1 總體技術方案框圖
本文校準方法的研究主要基于我國國軍標GJB150.23A-2009中相關要求,同時參考我國國家標準GB/T2423中的要求。
2 傾角測量系統
試驗臺在進行橫傾、縱傾、橫搖、縱搖試驗時,待測參數是平面的動/靜態傾斜角度,需要用到角度傳感器配合數據采集處理系統。本文根據傾斜搖擺試驗臺的相關技術指標及校準裝置的技術指標,選取角度測量范圍為±1°~±70°的單軸傾角傳感器配合數據采集處理系統進行測量。傾角測量系統方案框圖如圖2。
考慮到本系統中測量的動態傾角周期最快為3 s,即頻率為0.33 Hz,動態傾角頻率較低,擬采用選擇力平衡伺服型傾角傳感器,該傳感器屬于“固體擺”式傳感器的一種。此類傳感器測量范圍、精度及抗過載能力較高,在武器系統中應用較為廣泛,且傳感器在非線性、重復性、遲滯、溫度漂移和工作溫度、抗沖擊、振動等性能上具有非常優越的特點。該傳感器體積較小,使用方便,能夠在靜態和低頻動態測量時獲得較高的準確度。
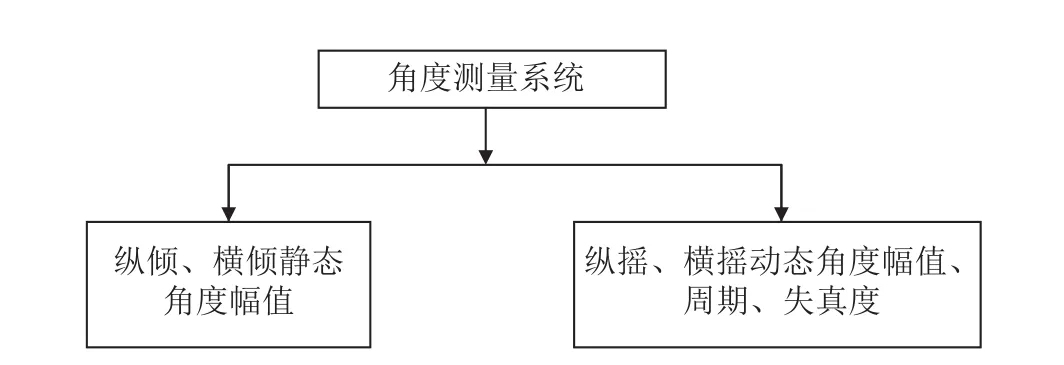
圖2 角度測量系統方案框圖
傾斜搖擺試驗中需要提取的搖擺角度和振動加速度幅值是正負雙方向的峰值,并不是常見的正弦信號峰值和峰峰值。通過分別提取采集的角度/角速度正弦波形的峰值和直流分量,然后經過數值計算得到正負峰值。試驗臺的正弦角度/角速度信號的偏置較為固定,通過分別提取采集的角度/角速度正弦波形的峰值和直流分量來計算正負峰值。
正弦逼近法采用最小二乘法來擬和出正弦信號的幅值,采樣時間短,更適用于本研究。
使用正弦逼近法提取正弦信號的峰值。正弦信號可表示為

其中,角頻率ω=2πf,f是已知的正弦信號頻率。對 x[t]進行數字采樣得到采樣序列 x[i](i=0,1,2,…,N-1,N表示采樣序列中的采樣點數)。由x[i]通過最小二乘法擬合可估計參數a,b,x0,則可得信號的幅值[2-3]。

失真度表征一個信號偏離純正弦信號的程度,按照國家標準,計算方法為

式中:A1為基波信號的幅值;A2,A3,A4為二次、三次、四次諧波信號的幅值。
失真度的測量方法主要分為兩種:基波剔除法和頻譜分析法。模擬式失真度測量儀通常采用基波剔除法,通過具有頻率選擇性的無源網絡(如:諧振電橋、文氏電橋等)抑制基波,利用總的電壓有效值和抑制基波后的諧波電壓有效值計算失真度,計算方法為

諧波分析法:用頻譜分析儀或波形分析儀檢測信號中的基波和各次諧波的電壓,獲得基波和各次諧波的電壓,從而計算出失真度[4-5]。
進行失真度測量時,信號處理方法包括模擬法和數字法。基于模擬法的失真度測量儀通常采用基波抑制方法,這種方式存在造價昂貴、壽命較短的弊病,且測量儀的輸入級、橋前放大器以及有源濾波器中有源器件的非線性會產生機內引入失真,同時一旦硬件老化,測量精度將大打折扣[4-5]。
數字法中,根據失真度的計算方法可分為頻譜分析法和曲線擬合法。本文待測信號的失真度要大于0.1%,且信號頻率較低,選擇數字法失真度測量方法是適用的[6]。本文選用HP公司的動態信號分析儀,能夠實現失真度的高精度、自動測量。
3 角速度測量系統
艏搖試驗是指試驗臺面在水平位置繞鉛垂軸所進行的周期往復運動,搖擺角度是動態轉動角度。有些傾斜搖擺試驗臺沒有實際的轉軸,例如采用并聯機構的6自由度運動平臺,無法安裝需要固定在轉軸上的轉角傳感器。部分傾斜搖擺試驗臺雖然有轉軸,例如三軸的搖擺臺,但試驗臺類型不同,尺寸不同,生產廠家不同,轉軸連接方式和大小也不同,在現場校準過程中,安裝轉角傳感器極其困難,其安裝方式的可操作性和通用性極差。因此無法采用轉角傳感器直接測量轉角。本文擬采用角速度傳感器進行轉動角度的間接測量。陀螺儀是用來測量角位移和角速度的傳感器,通過角速度傳感器測量得到的角速度波形,間接計算得到轉動角度幅值、周期及波形失真度。
在系統應用中,由于角速度傳感器的帶寬一般要比角位移傳感器的帶寬寬,因此系統轉動過程中產生的較高頻率的機械噪聲,極易影響角速度傳感器,造成角速度傳感器的輸出噪聲較大,輸出波形抖動現象較為嚴重。并且陀螺儀輸出角速度是瞬時量,對其積分時,零漂等干擾會在積分過程中得到放大,其累積漂移誤差隨著積分時間的增長而迅速增加,導致輸出角度與實際不符。本文中參照項目艏搖角度幅值及周期的技術指標,以及國軍標、國標中搖擺試驗對艏搖的試驗要求,在艏搖試驗過程中,典型試驗量級為角度4°,轉動周期20 s,角速度為0.2(°)/s。需要選擇小角速度測量范圍、低零漂的傳感器,此類傳感器靈敏度較大,可以增大傳感器輸出電壓信號的信噪比,盡量減小角速度傳感器輸出噪聲及零漂的影響。本文選擇角速度傳感器短期漂移穩定性小于0.025(°)/s,靈敏度線性度誤差小于0.05%of F.R。
本文先從角速度信號中獲取角速度幅值和周期信息,再通過正弦積分轉換計算得到角度信號的幅值和周期信息,即進行頻域上的積分,這樣能夠減小角速度時域信號中噪聲和漂移干擾對積分的影響。
4 傾斜或搖擺角度測量結果的不確定度來源
4.1 由傳感器測量誤差引入
傳感器角度測量誤差主要由傳感器靈敏度校準不確定度、溫度變化對靈敏度的溫漂影響、因垂直于傳感器靈敏軸方向的加速度或者傾斜角度耦合到傳感器的輸出信號上所產生的橫軸誤差、因安裝誤差導致水平姿態傳感器無法分辨加速度干擾信號和水平姿態信號以及不同角度幅值下傳感器靈敏度非線性等因素產生。
4.2 由數據采集系統電壓測量誤差引入
數據采集系統電壓測量誤差主要包括量化誤差——由于A/D轉換器的有限分辨力產生的數字輸入量與等效模擬輸入量直接的偏差;增益誤差——A/D轉換過程中的增益誤差為A/D輸出達到滿量程時,時間模擬輸入與理想輸入之間的差值;偏置誤差——A/D轉換過程中的偏置誤差為使A/D轉換器的輸出最低位為1,施加到數據采集卡A/D轉換器模擬輸入端的實際電壓與理論電壓(0.5 LSB所對應的電壓值)之差;噪聲引起的誤差等。
4.3 由被校搖擺試驗臺產生搖擺波形的諧波分量引入[2]
在正弦波擬合中,擬合幅度估計參數誤差為

式中:ΔA1為基波信號擬合幅度誤差;A1為基波信號擬合幅度;N為采集的信號周期個數;h為諧波階次;Ah為第h次諧波信號的幅度。
4.4 由被校搖擺試驗臺產生搖擺波形的直流分量引入[2]
在正弦波擬合中,擬合的直流分量的估計參數誤差為

式中:Δd為信號直流分量估計值誤差。
5 結論
本文利用傾斜搖擺試驗臺模擬海上環境條件下試件的運動狀態,實現艦船儀器儀表的環境模擬試驗。近年來,隨著國內艦載機事業的發展,越來越多的航空儀器儀表設備被用于艦載機上,而航空母艦平臺在海上是一個六自由度運動的平臺,它不僅在海平面上作平面運動,而且在海浪的作用下還會產生縱向和橫向的傾斜搖動,這些運動是艦船特有的運動狀態,這種狀態也反映了艦載設備的使用特點,所以對于起飛、降落,停放在航母平臺上的艦載武器系統、艦船大型儀器設備、導航和光學系統等需使用傾斜搖擺試驗臺進行傾斜、搖擺試驗,這已經成為一項艦載設備設計、制造、試驗的基本環境條件之一,是保證產品正常工作性能的關鍵試驗,同時傾斜搖擺試驗臺也是艦載儀器設備環境試驗中的一項關鍵設備。因此本文的研究是具有極大的社會效益。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
