低緯地區(qū)太陽能發(fā)電系統(tǒng)轉(zhuǎn)換效率提升的研究
2020-06-22 11:26:24邸子旭曾林鵬黃旭陽王晶晶魯書瑋
通信電源技術(shù) 2020年7期
邸子旭,曾林鵬,黃旭陽,王晶晶,魯書瑋,汪 源
(三亞學院 理工學院,海南 三亞 572022)
0 引 言
太陽能是指太陽光輻射到地球上的能量,其主要的利用方式有光熱轉(zhuǎn)換(太陽能熱水器)、光電轉(zhuǎn)換(光伏發(fā)電)和光化學轉(zhuǎn)換等[1]。盡管太陽輻射到地球大氣層的能量僅為其總輻射能量的22億分之一,但每秒照射到地球上的能量也相當于500萬噸煤燃燒所提供的[2]。然而由于太陽能資源受到季節(jié)、晝夜、地理緯度、海拔高度及天氣等因素的影響,其穩(wěn)定性不高,且太陽能利用裝置成本較高,因此太陽能的利用還不是很普及。因此,有效提高太陽能的利用效率就成為最重要的問題。
現(xiàn)有光伏發(fā)電設備大多是以固定方位安裝的光伏模塊作為能量采集裝置,設計方式單一,占用空間大,成本高昂,基于方位固定,光伏模塊的光電轉(zhuǎn)換效率易受周圍物體遮擋、太陽位置變化等因素變化而改變[1]。
文獻[2]對于低緯度地區(qū)太陽運動軌跡進行了詳細的研究,通過數(shù)據(jù)擬合的方式分析了太陽方位角和高度角對光伏強度的影響,同時文獻[3]對于光伏模塊方位與太陽能轉(zhuǎn)換效率之間的關(guān)系進行詳細的研究,說明優(yōu)化光伏模塊的方位是提升光伏模塊光電轉(zhuǎn)換效率的重要因素之一。本文所設計的光伏模塊方位調(diào)節(jié)裝置,可根據(jù)不同時刻太陽方位角和高度角變化引起的光照強度變化來自動調(diào)節(jié)光伏模塊的方位[4],使白天的大部分時刻太陽光都能垂直照射光伏模塊,進而提高光伏模塊的光電轉(zhuǎn)化效率。
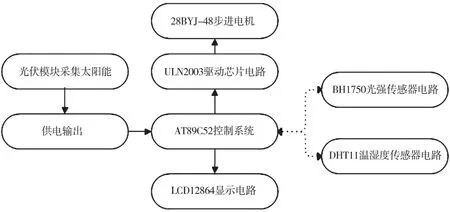
圖1 整體系統(tǒng)設計圖
1 光伏模塊方位調(diào)節(jié)裝置的設計
本文主要通過傳感器技術(shù)和單片機技術(shù)來設計光伏模塊方位調(diào)節(jié)裝置,整個系統(tǒng)主要由傳感器模塊、步進電機及電機驅(qū)動模塊、單片機控制模塊和光伏模塊等部分組成,整體系統(tǒng)設計如圖1所示。光伏模塊為整個系統(tǒng)提供能源,傳感器模塊檢測環(huán)境物理量,為單片機控制模塊的控制決策提供依據(jù),進而控制電機及驅(qū)動模塊調(diào)整光伏模塊的方位,提升光伏模塊的光電轉(zhuǎn)換效率。
1.1 傳感器模塊
傳感器模塊由4個光強傳感器、1個溫濕度傳感器組成,主要作用是感知光照強度、溫度和濕度等環(huán)境參數(shù)。通過4個光強傳感器接收的不同光強信息來確定什么方位光強最大,以此為依據(jù)來判斷光伏模塊的最優(yōu)方位。在具體設計時,考慮到實際情況中入射太陽光不論從何種方向照射均為平行光,為確保4個光強傳感器所采集到的光強信號有較大區(qū)分度且真實可靠,在光伏模塊上安裝傳感器時,4個光強傳感器與光伏模塊平面并非垂直,都向中心形成相同的傾斜角,使不同光強傳感器能夠接收到不同的光強信號,具體安裝時的設計圖如圖2所示。
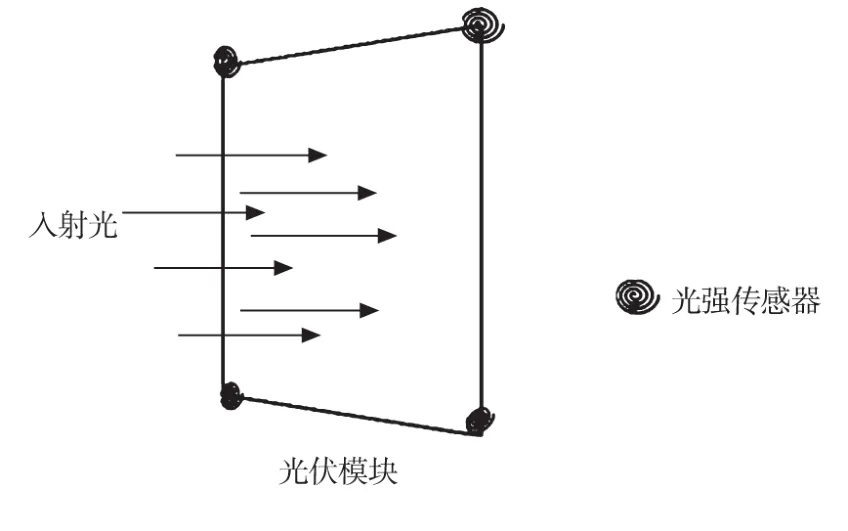
圖2 光強傳感器安裝設計圖
在比較多種傳感器的靈敏度、耗電功率等參數(shù)的基礎(chǔ)上,選擇靈敏度較高且功率較低的BH1750光強傳感器和DHT11溫濕度傳感器。光強傳感器檢測物理環(huán)境產(chǎn)生的電信號通過I2C總線傳輸?shù)娇刂葡到y(tǒng),經(jīng)過信息處理,產(chǎn)生信號控制光伏模塊自動調(diào)節(jié)方位。溫濕度傳感器檢測環(huán)境溫度和濕度,當環(huán)境溫濕度超過警戒值時系統(tǒng)將報警,確保系統(tǒng)工作于正常的環(huán)境下。
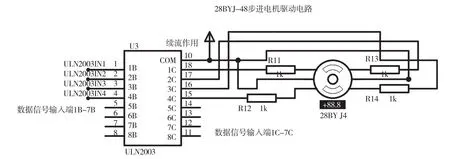
圖3 電機驅(qū)動電路圖
1.2 步進電機及電機驅(qū)動模塊
電機驅(qū)動電路如圖3所示,選用ULN2003驅(qū)動芯片來驅(qū)動28BYJ4-48步進電機,對光伏模塊進行方位調(diào)節(jié)。ULN2003驅(qū)動芯片接收到控制模塊產(chǎn)生的控制信號后,向28BYJ4-48步進電機發(fā)送相對應的驅(qū)動指令,實現(xiàn)光伏模塊自動向不同方位進行轉(zhuǎn)動調(diào)節(jié),實現(xiàn)光伏模塊的光電轉(zhuǎn)換效率的提升。
1.3 單片機控制模塊
單片機控制模塊是本系統(tǒng)的控制核心,選用STC89C52RC單片機作為主控制器。單片機接收光強傳感器的信號后,通過C語言程序進行計算后產(chǎn)生控制步進電機動作的控制信號,發(fā)送給電機驅(qū)動電路,進而控制光伏模塊方位的改變,程序控制策略如圖4所示。傳感器模塊與單片機之間使用I2C總線方式傳輸數(shù)據(jù)。傳感器模塊中每個傳感器都具有不同的硬件器件地址,通過在I2C總線上進行硬件地址的廣播可以做到與相對應的硬件進行數(shù)據(jù)交互,完成數(shù)據(jù)交換,所有傳感器將共用一組I2C總線,根據(jù)系統(tǒng)運行順序進行逐個訪問,并將每個傳感器的具體數(shù)值傳輸給單片機。在對環(huán)境數(shù)據(jù)進行感知的同時,將傳感器的數(shù)據(jù)顯示在LCD12864顯示電路中,便于工作人員觀察和記錄。
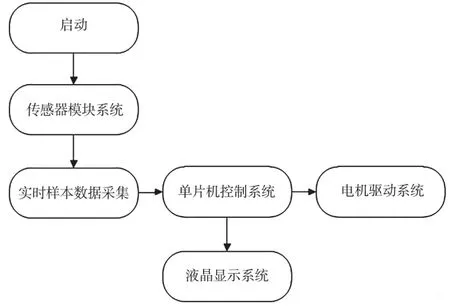
圖4 系統(tǒng)程序控制策略圖
2 系統(tǒng)測試
在對上述各模塊進行功能測試后,按照圖1的結(jié)構(gòu)組裝整體系統(tǒng)并將編寫好的C語言程序燒錄單片機后進行系統(tǒng)測試。實際測試效果如圖5所示。從系統(tǒng)測試的結(jié)果來看,選用額定電壓為5 V、額定功率為1 W的太陽能光伏模塊作為系統(tǒng)電源,其輸出功率可達到步進電機啟動的額定功率,光伏模塊隨著太陽方位的變化而隨之調(diào)整,相比于固定方位的光伏模塊,方位可調(diào)的光伏模塊光電轉(zhuǎn)換效率得到了提高。
3 結(jié) 論
本光伏模塊方位調(diào)節(jié)裝置采用STC89C52單片機作為核心控制模塊,通過傳感器技術(shù)和單片機技術(shù),利用4個光強傳感器接受光照強度的變化,通過I2C總線將光強信號傳輸給單片機模塊,單片機對光強信號進行處理后,將產(chǎn)生的驅(qū)動指令發(fā)送給電機驅(qū)動電路,驅(qū)動步進電機對光伏模塊的方位進行調(diào)節(jié),提高光伏模塊的光電轉(zhuǎn)換效率。經(jīng)過系統(tǒng)測試,整個光伏模塊方位調(diào)節(jié)系統(tǒng)穩(wěn)定性好、使用時間長、控制準確度,系統(tǒng)經(jīng)濟價值較好,有較強的應用推廣前景。

圖5 系統(tǒng)整體測試圖
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
時代英語·高二(2015年1期)2015-03-16 00:08:11
電子設計工程(2015年15期)2015-02-27 12:07:30