一種四開關升降壓變換器的控制策略
2020-06-22 11:26:26趙乃新王文宇
通信電源技術 2020年7期
趙乃新,王文宇
(齊齊哈爾大學 計算機與控制工程學院,黑龍江 齊齊哈爾 161006)
0 引 言
Buck-Boost變換器作為模塊化電源的一種拓撲結構,大量應用于通信、新能源發電等領域。在實際的工程應用如光伏發電等新能源發電中,產生的直流電存在不可控性、間斷時間長等缺點。受季節和氣候的影響,直流變換器輸入電壓波動較大。因此,要求變換器具有較寬的輸入電壓范圍[1]。
兩級式拓撲廣泛應用于實現寬輸入電壓范圍的場合[2],常采用Buck型變換器作為輸入端,Boost變換器應用輸出端的拓撲結構。但是,針對兩級式拓撲結構,梁勇等[3]提出的兩模式控制未考慮開關管實際占空比的影響。開關管的占空比在工程應用中受到開關器件頻率的影響,占空比達不到極限,當變換器輸入電壓接近上限電壓時,在切換區域出現輸出電壓失調的問題。李山等[4]提出了三模式切換的控制策略,通過在Buck和Boost兩種變換模式間加入了一種非傳統的升降壓模式,提出了Buck-Boost變換器的三模式切換的控制策略,解決了電壓失調的問題。但是,這種非傳統的Buck-Boost模式中使用的MOSFET接受觸發信號后具有可以雙向導通的特性[5],使得電感電流存在反向流動的情況,同樣會造成輸出電壓的不穩定。由于Buck-Boost變換器的三模式切換復雜,目前尚未有文獻建立精確的數學模型,使得Libin、Yang等[6-7]設計的這一類需要控制對象精確數學模型的控制方法無法使用。需要使用Anna、Aldo等[8-9]研究的這一類不依賴其數學模型而利用經驗和知識整定參數的控制方法。適用于這種模型和切換策略復雜的變換器,在DC-DC變換器的控制中一般使用PID控制算法,以產生變換器工作時的控制信號[10],模糊控制與PID控制二者結合可以對該類控制對象起到良好的控制效果。
1 四開關升降壓變換器設計
1.1 主電路設計
電路拓撲結構如圖1所示,S1和S2組成Buck單元,S3和S4組成Boost單元,設計S1、S2控制信號反相,S3、S4控制信號反相。針對MOSFET導通后電流,可以通過開關管雙向流動的問題,在電感側串聯二極管阻斷反向流動電流。
電路工作在Boost模式時,S1常閉,S2常開,S3、S4不同時通斷,如圖2(a)所示。輸出電壓為:

電路工作在Buck-Boost模式時,S1、S3同時通斷,S2、S4同時通斷,如圖2(b)所示。輸出電壓為:

電路工作在Buck模式,S3常斷,S4常通,S1、S2不同時通斷,如圖2(c)所示。輸出電壓為:

式(1)、式(2)及式(3)中,D為控制信號占空比。
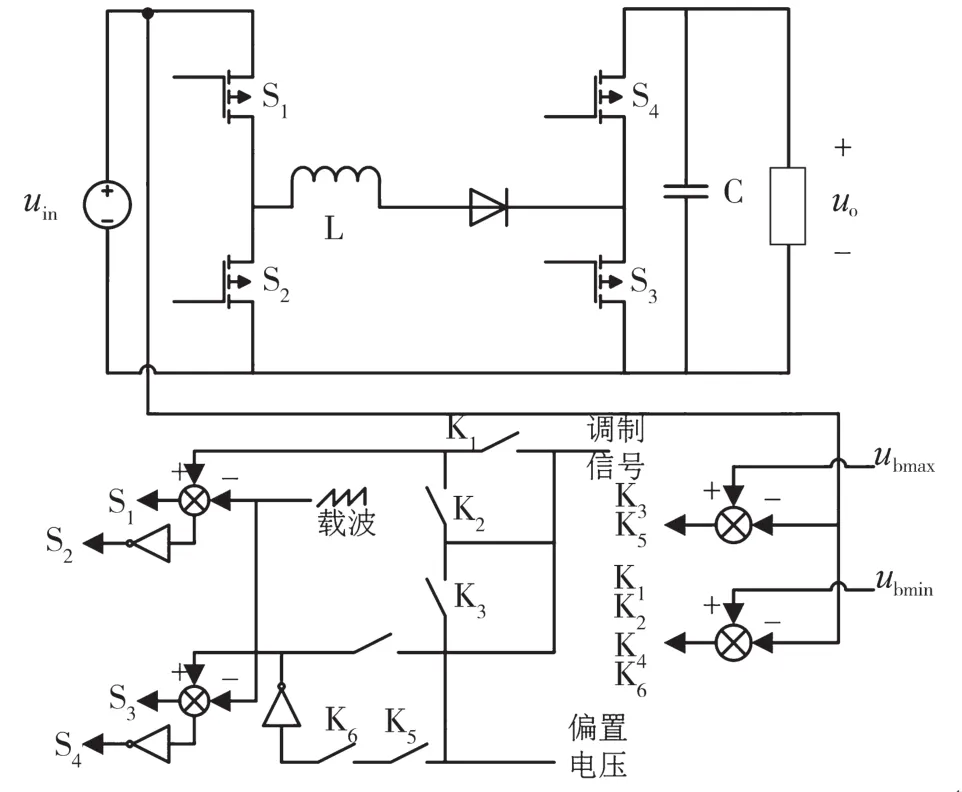
圖1 主電路及控制電路原理圖
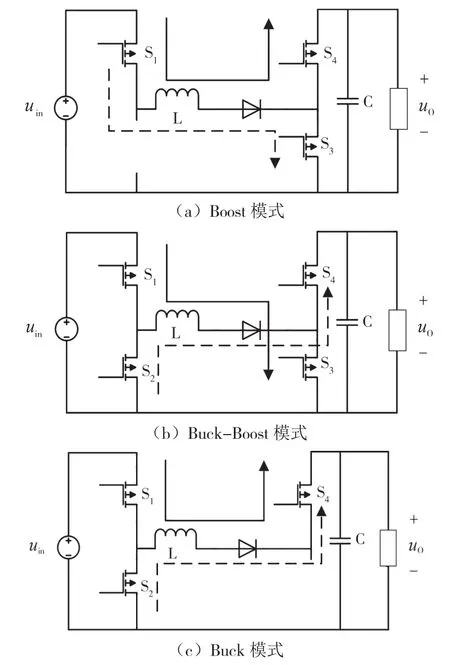
圖2 三種模式下電感電流流動方向
1.2 切換策略設計
S1~S4的驅動波形如圖3所示,并在圖3中給出了3種模式輸入電壓的范圍。根據輸入電壓的變化,相應的控制策略為:(1)當輸入電壓低于期望輸出電壓時,用Boost模式升高電壓;(2)當輸入電壓高于期望輸出電壓時,用Buck模式降低電壓;(3)在兩模式中引入Buck-Boost模式,以達到平滑切換的目的。
開關管占空比為D,D∈[Dmin,Dmax]。規定Boost模式電源模塊電壓上限為ubmax,Buck模式電源模塊電壓下限為ubmin,并且有ubmax<ubmin。當輸入電壓大小uin<ubmax,電路工作在Boost模式輸入范圍[(1-Dmax)uo,(1-Dmin)];當輸入電壓ubmax<uin<ubmin,電路工作在Buck-Boost模式,輸入范圍[(1-Dmax)uo/Dmax,(1-Dmin)uo/Dmin];當uin<ubmin,電路工作在Buck模式,輸入范圍[uo/Dmax,uo/Dmin]。

圖3 開關管驅動波形圖
取U1=ubmax-uin,U2=uin-ubmin為模式切換控制信號,控制圖1中控制單元6個開關的通斷來改變控制電路的拓撲結構,使得偏置電壓和控制信號加在不同的開關管觸發端,給應該常開或常斷的開關管加恒定的正電壓或負電壓,給接收PWM波形控制的開關管接通控制信號的通路,從而實現對主電路模式切換的控制。相應的開關動作策略如表1所示,表中0表示斷,1表示通。相應的仿真模型如圖4所示。
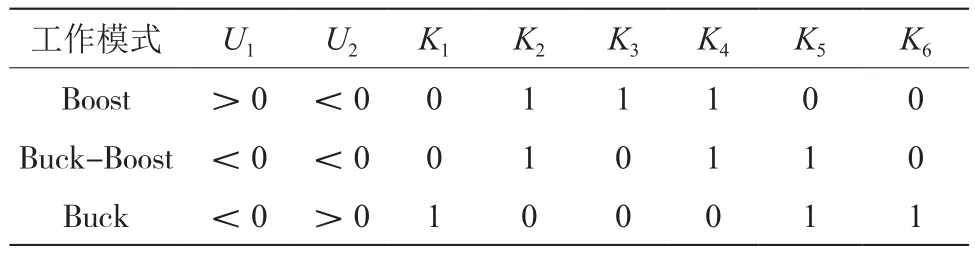
表1 控制模塊開關通斷策略
2 模糊PID控制器設計
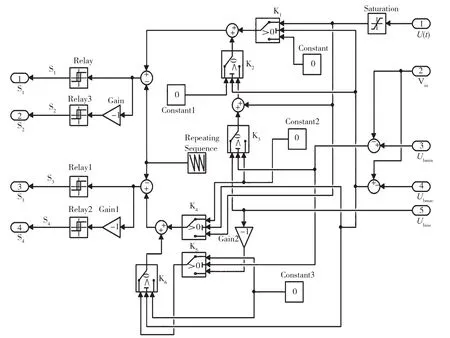
圖4 控制單元仿真模型
PID控制具有結構簡單、抗擾動能力強等優點。傳統的PID控制參數的設計依賴于對控制對象建立精確的數學模型,對于較為復雜的DC-DC變換電路存在非線性、難建模的問題,給控制器的設計帶來了困難。本文使用模糊PID控制的方法是PID差錯控制技術中的一種,通過檢測系統的動態變化調整Kp、Ki、Kd的參數,使其適應系統的動態變化,實時匹配被控對象。
取輸出電壓偏差e和電壓偏差的變化率ec作為控制器的輸入,計算后的輸出量為ΔKp、ΔKi、ΔKd。由于模糊規則難以通過具體的數學邏輯推導,故進行大量的仿真實驗得到如表2~表4所示的關于比例、積分、微分的規則表。其中,字母含義為:NB(負大)、NS(負小)、ZO(零點)、PS(正小)、PB(正大)。利用Matlab的模糊工具箱,建立mamdani型模糊控制器,隸屬函數選取高斯型,使用面積中心法解模糊。
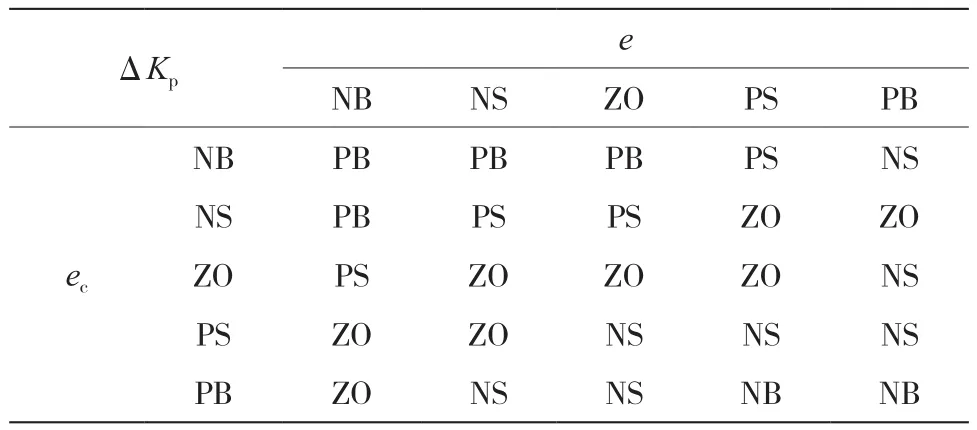
表2 比例環節模糊規則表
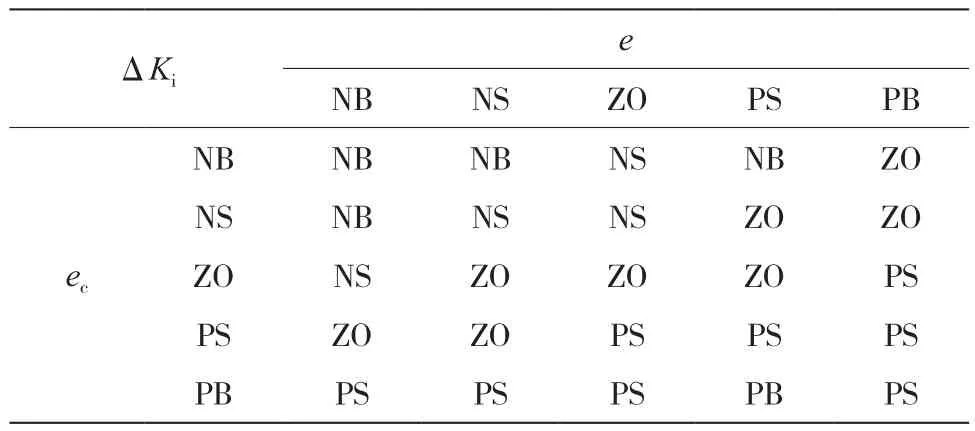
表3 積分環節模糊規則表
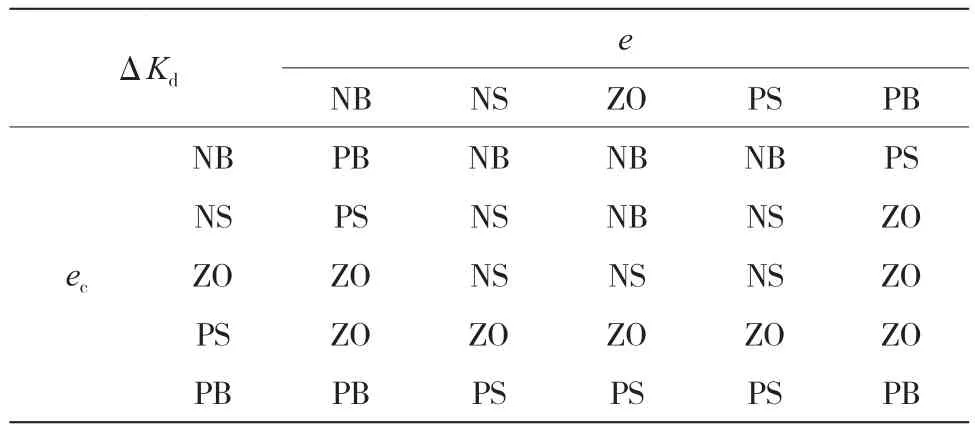
表4 微分環節模糊規則表
3 仿真實驗
在Simulink平臺上搭建仿真電路。負載電阻8 Ω,L=7.23×10-6H,C=0.26×10-3F,開關頻率50 kHz,電感電流不連續。輸入電壓分為3個階梯20 V、40 V、70 V,uo= V,設Dmin=0.2,Dmax=0.8。
輸出電壓如圖5所示。輸入電壓20 V時,電路工作在Boost模式;輸入電壓40 V時,電路工作在Buck-Boost模式;輸入電壓70 V時,電路工作在Buck模式。如圖5(a)所示,實驗電路在電感側串聯二極管阻斷了電流反向流動;如圖5(b)所示,實驗電路未在電感側串聯阻斷反向電流的二極管,輸出電壓波動大于圖5(a)。在Dmin=0.2,Dmax=0.8時,普通的Buck-Boost變換器輸入電壓范圍在0.25uo~4uo,而本文設計的變換器的輸入電壓范圍可達0.2uo~5uo,輸入電壓范圍在原基礎上增加了28%的輸入范圍。
圖6(a)為使用Ziegler-Nichols法整定參數的PID控制,在Boost模式下輸出電壓紋波較大且模式切換時的電壓突變較大。圖6(b)為本文所用模糊控制方法整定PID參數,在Boost和Buck-Boost模式下減小了輸出電壓紋波和切換電壓突變。
4 結 論
通過變換器3個模式的切換,實現對電源電壓變化的動態適應,同時實現了寬輸入電壓范圍的設計目標。在電感側串聯二極管阻斷反向電流,使得變換器在電感電流反向流動的情況下依然能夠穩定輸出工作電壓。使用模糊控制的方式對Kp、Ki、Kd進行調節,適應變換器在不同工作模式下的控制需要,具有比固定參數的PID控制器更好的穩態控制性能。通過這3方面的設計,能夠實現這種寬輸入電壓范圍的Buck-Boost變換器輸出電壓的穩定。
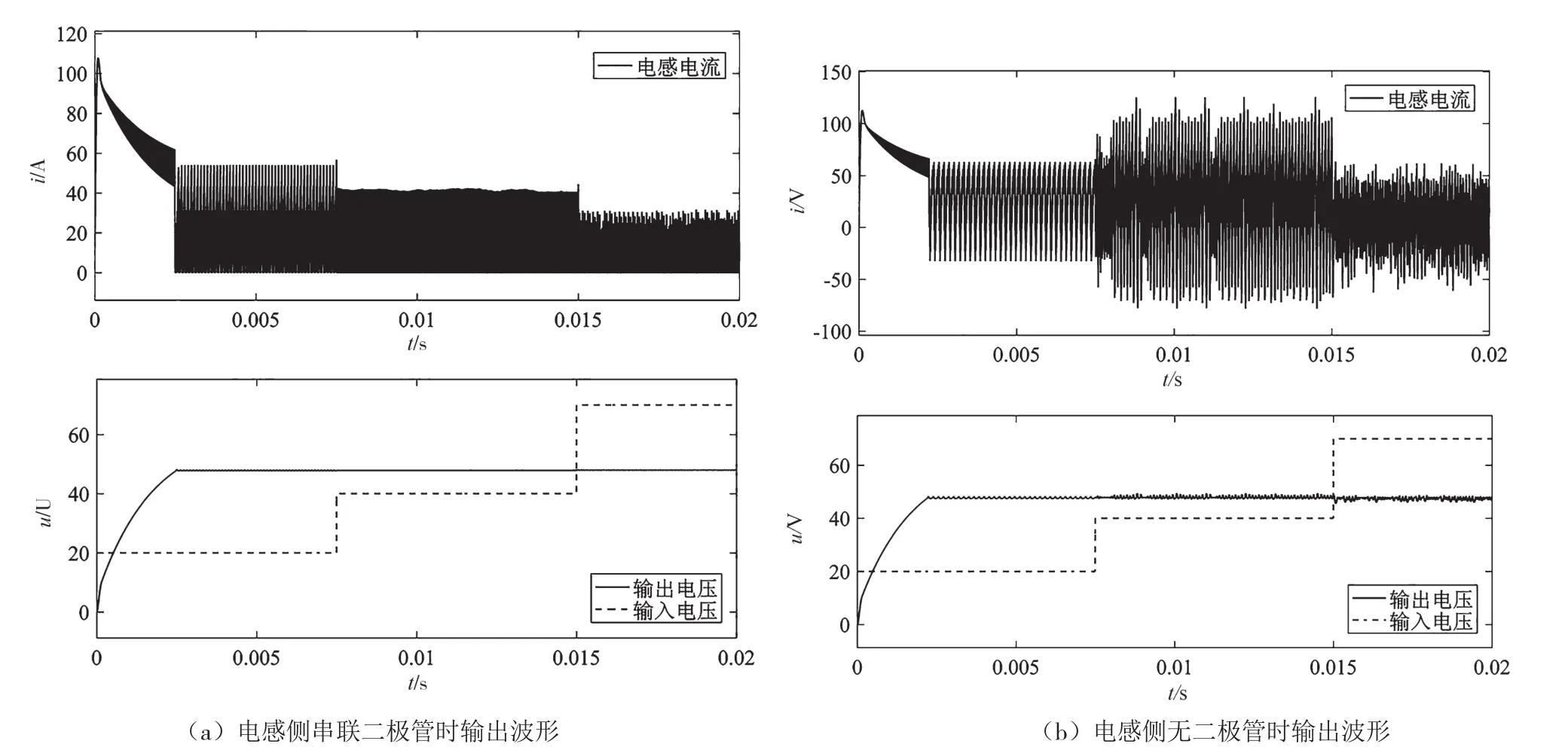
圖5 輸出電壓和電流波形
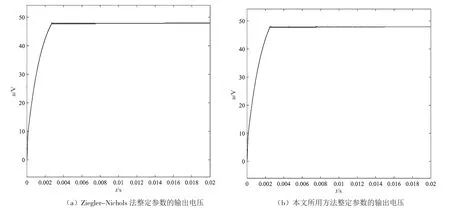
圖6 兩種控制方法下輸出電壓比較
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00