基于改進(jìn)粒子群優(yōu)化算法的無人機(jī)路徑規(guī)劃研究
2020-06-22 13:23:17胡丁丁梁翀
數(shù)字技術(shù)與應(yīng)用 2020年4期
關(guān)鍵詞:無人機(jī)
胡丁丁 梁翀
摘要:粒子群優(yōu)化(PSO)算法是一種具有過早收斂和易于停滯的簡單方法。在使用PSO解決路徑規(guī)劃問題時, 效率損失和次優(yōu)解決方案經(jīng)常發(fā)生。因此,本文提出了一種通過使用Rauch–Tung–Striebel(RTS)濾波器來優(yōu)化影響PSO算法性能參數(shù)的方法。此外,使用RTS濾波器消除PSO更新位置的不規(guī)則誤差,并平滑生成的路徑。實(shí)驗(yàn)結(jié)果表明,該方法基 于PSO并結(jié)合RTS算法,在無人機(jī)路徑規(guī)劃問題的解決方案質(zhì)量和魯棒性方面均優(yōu)于現(xiàn)有方法。
關(guān)鍵詞:路徑規(guī)劃;無人機(jī);蜂群算法;復(fù)合形法;尋優(yōu)耗時
中圖分類號:V249.1? ? 文獻(xiàn)標(biāo)識碼:A? ? ? ?文章編號:1007-9416(2020)04-0000-00
0引言
為了滿足無人機(jī)航路規(guī)劃問題的多重需求,避免鋸齒形航跡,本文提出一種基于粒子群優(yōu)化算法(PSO)的新方法,該算法具有粒子群搜索算法優(yōu)良的搜索和更新能力,以及粒子群算法的適用性,實(shí)時動態(tài)規(guī)劃。由于PSO算法的最優(yōu)解始終是離散的,因此易導(dǎo)致出現(xiàn)次優(yōu)解。PSO離散解決方案的額外隨機(jī)性會導(dǎo)致計(jì)劃的路徑曲折,這些曲折的飛行速度很高,無法被遵循[1]。
為了提高PSO算法的性能,采用了Rauch-Tung-Striebel(RTS)濾波器與粒子群算法相結(jié)合的算法,相比于傳統(tǒng)算法和粒子群優(yōu)化算法,本文提出的算法具有更好的準(zhǔn)確性和魯棒性,并且在離散結(jié)果平滑中具有很大的實(shí)用性。此外,RTS可以消除PSO算法計(jì)劃的路徑的額外隨機(jī)性。這樣,通過RTS濾波器改進(jìn)的PSO算法具有比PSO算法更好的性能, 并且可以為固定翼無人機(jī)提供平滑合理的飛行路徑。基于以上所述,基于改進(jìn)粒子群優(yōu)化算法,與其他現(xiàn)有算法相比,該方法獲得了更好的解決方案。
本文的其余部分安排如下:第1節(jié)介紹了該方法的詳細(xì)說明,第2節(jié)給出了實(shí)驗(yàn)結(jié)果,以及和其他算法的比較,最后,通過對結(jié)果的總結(jié)說明了結(jié)論。
1方法介紹
本節(jié)介紹了本文中使用的算法。我們首先介紹了PSO算法,然后基于此,提出了一種改進(jìn)的PSO算法。
1.1粒子群優(yōu)化算法(PSO)
粒子群優(yōu)化算法是人們通過鳥群捕食行為的研究演化而來。其基本思想是通過群體中個體之間的協(xié)作和信息共享來尋找最優(yōu)解[2]。?
PSO算法假設(shè)鳥群中的鳥是一種無質(zhì)量的粒子,該粒子具有位置和速度兩個屬性,其中位置代表移動的方向,速度代表移動的快慢。單個粒子在自身的搜索空間中尋找最優(yōu)解,并將其記為當(dāng)前個體最優(yōu)值。將個體最優(yōu)值與整個粒子群里的所有粒子共享,找到最優(yōu)的那個個體最優(yōu)值作為整個粒子群的當(dāng)前全局最優(yōu)解,所有粒子均根據(jù)當(dāng)前自身最優(yōu)值和其他粒子共享的當(dāng)前全局最優(yōu)值來調(diào)整自己的位置和速度。
1.2改進(jìn)粒子群優(yōu)化算法
與TSP問題的離散性不同,路徑規(guī)劃問題是在2維或3維空間中搜索最優(yōu)連續(xù)路徑。因此,為解決連續(xù)路徑規(guī)劃問題(或類似問題),本文提出了一種學(xué)習(xí)因子自適應(yīng)的基于PSO優(yōu)化的方法。學(xué)習(xí)率自適應(yīng)可避免粒子不規(guī)則運(yùn)動帶來的隨機(jī)誤差。換句話說,計(jì)劃的之字形路徑將更加平滑,以適應(yīng)固定翼無人機(jī)。
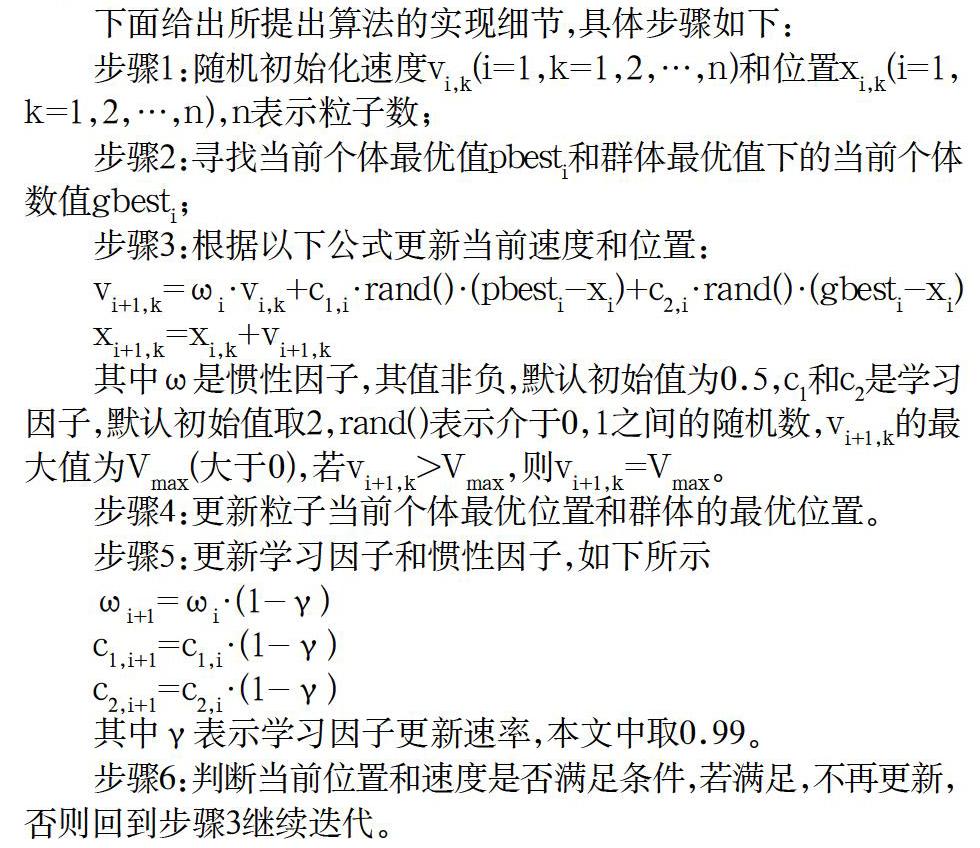
下面給出所提出算法的實(shí)現(xiàn)細(xì)節(jié),具體步驟如下:
步驟1:隨機(jī)初始化速度v_(i,k) (i=1,k=1,2,…,n)和位置x_(i,k) (i=1,k=1,2,…,n),n表示粒子數(shù);
步驟2:尋找當(dāng)前個體最優(yōu)值pbest_i和群體最優(yōu)值下的當(dāng)前個體數(shù)值gbest_i
步驟3:根據(jù)以下公式更新當(dāng)前速度和位置:
v_(i+1,k)=〖ω_i?v〗_(i,k)+c_(1,i)?rand()?(pbest_i-x_i )+c_(2,i)?rand()?(gbest_i-x_i)
x_(i+1,k)=x_(i,k)+v_(i+1,k)
其中ω是慣性因子,其值非負(fù),默認(rèn)初始值為0.5,c_1和c_2是學(xué)習(xí)因子,默認(rèn)初始值取2,rand()表示介于0,1之間的隨機(jī)數(shù),v_(i+1,k)的最大值為V_max(大于0),若v_(i+1,k)>V_max,則v_(i+1,k)=V_max。
步驟4:更新粒子當(dāng)前個體最優(yōu)位置和群體的最優(yōu)位置。
步驟5:更新學(xué)習(xí)因子和慣性因子,如下所示
ω_(i+1)=ω_i?(1-γ)
c_(1,i+1)=c_(1,i)?(1-γ)
c_(2,i+1)=c_(2,i)?(1-γ)
其中γ表示學(xué)習(xí)因子更新速率,本文中取0.99。
步驟6:判斷當(dāng)前位置和速度是否滿足條件,若滿足,不再更新,否則回到步驟3繼續(xù)迭代。
2仿真實(shí)驗(yàn)
改進(jìn)的PSO可以應(yīng)用于2維或3維連續(xù)問題。為了保持精度,實(shí)驗(yàn)過程保留了一般性,并且在路徑規(guī)劃中改進(jìn)了PSO。針對無人機(jī)在三維空間中的路徑規(guī)劃問題進(jìn)行了分析。
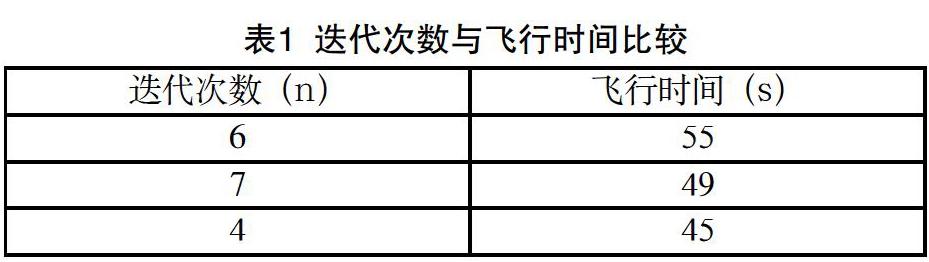
提出的改進(jìn)的PSO算法是一種學(xué)習(xí)因子自適應(yīng)的復(fù)雜方法。為了更好地說明算法性能,我們分別對傳統(tǒng)PSO算法、人工蜂群算法以及改進(jìn)PSO算法進(jìn)行了仿真,仿真結(jié)果表明改進(jìn)PSO算法可以獲得更好的結(jié)果并顯示出更強(qiáng)的穩(wěn)定性,如表1所示。
3結(jié)語
為了解決路徑規(guī)劃問題,提出了一種基于PSO學(xué)習(xí)因子自適應(yīng)的方法。該方法可以通過平滑計(jì)劃并消除結(jié)果的額外隨機(jī)性來提高PSO算法的性能。通過與第3部分中的其他路徑規(guī)劃方法進(jìn)行比較,對提議的方法的有效性進(jìn)行了實(shí)驗(yàn)檢驗(yàn),并通過設(shè)計(jì)的適合度函數(shù)(包括路徑的長度和高度)考慮平均值,從而驗(yàn)證了性能。從實(shí)驗(yàn)結(jié)果來看,可以得出結(jié)論:本文提出的算法性能要比其他算法更好。
參考文獻(xiàn)
[1] 趙啟兵,劉勇.多旋翼飛行器的可控度分析[J].航空學(xué)報(bào),2017,38(S1):163-170.
[2] 龐慶霈,李家文,黃文浩.四旋翼飛行器設(shè)計(jì)與平穩(wěn)控制仿真研究[J].電光與控制,2012,19(3):51-55.
收稿日期:2020-03-02
基金項(xiàng)目:國網(wǎng)信息通信產(chǎn)業(yè)集團(tuán)安徽繼遠(yuǎn)軟件有限公司綜合計(jì)劃項(xiàng)目(基于蜂群算法的無人機(jī)群協(xié)同作業(yè)關(guān)鍵技術(shù)研究與應(yīng)用)。
作者簡介:胡丁丁(1989—),男,安徽安慶人,碩士,工程師,研究方向:電力人工智能技術(shù)研究。
Research on UAV Path Planning Based on Improved Particle Swarm Optimization Algorithm
HU Ding-ding, LIANG Chong
(Anhui Jiyuan Software Co., Ltd., Hefei Anhui? 230088)
Abstract: Particle Swarm Optimization (PSO) algorithm is a simple method with premature convergence and easy stagnation. When using PSO to solve path planning problems, efficiency losses and suboptimal solutions often occur. Therefore, this paper proposes a method to optimize the performance parameters of the PSO algorithm by using a Rauch–Tung–Striebel (RTS) smoother. In addition, an RTS smoother is used to eliminate irregular errors in the PSO update position and smooth the generated path. Experimental results show that this method is based on PSO and RTS algorithm, and it is superior to existing methods in terms of solution quality and robustness of UAV path planning problems.
Key words: path planning; UAV; bee Colony Algorithm; complex Method; optimization Time
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
