
基于三關節機械臂的堆芯支撐板異物抓取方案
2020-06-24 03:33:24杜林寶
中國核電 2020年2期
關鍵詞:機械
胡 鑫,楊 斌,劉 濤,杜林寶,胡 娜
(中核武漢核電運行技術股份有限公司,湖北 武漢 430223)
在核電站的安裝、調試、生產運行和定期檢修活動中存在大量設備解體、系統打開作業,這些作業不可避免帶來異物進入系統設備的風險[1]。一旦異物進入系統設備將會對核電站的安全生產和運行造成嚴重威脅,導致設備故障或損壞,特別是堆芯處異物極有可能導致燃料組件破損[2-3],一方面一回路放射性水平大幅提高威脅工作人員安全,另一方面浪費未燃盡燃料組件造成巨大經濟損失。因此,必須對堆芯處發現異物進行異物打撈處理。
當前對于堆芯上方懸浮的異物,堆芯下柵格板上方的下沉異物,可以利用長桿遠距離操作打撈工具完成異物打撈[4],也可利用水下機器人攜帶機械臂近距離實現異物抓取[5-6]。然而,對于堆芯支撐板上方異物,沒有一種可行異物打撈解決方案。由于堆芯下柵格板與支撐板所組成圓柱形封閉區域結構復雜,而且可進入尺寸嚴格受限,異物抓取工具和異物抓取機器人都不可達。基于M310機組堆芯結構提出并設計堆芯支撐板上方異物抓取機械臂。
1 堆芯結構介紹
M310是國內當前主流的二代壓水堆核電站,以M310堆芯為例介紹支撐板上方異物抓取區域,此區域結構復雜且空間狹小。堆芯下部堆內構件三維圖如圖1所示,俯視圖如圖2所示。
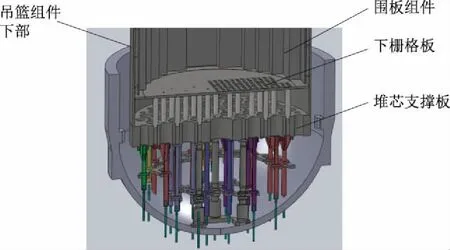
圖1 下部堆內構件三維圖Fig.1 3D diagram of the lower reactor internals
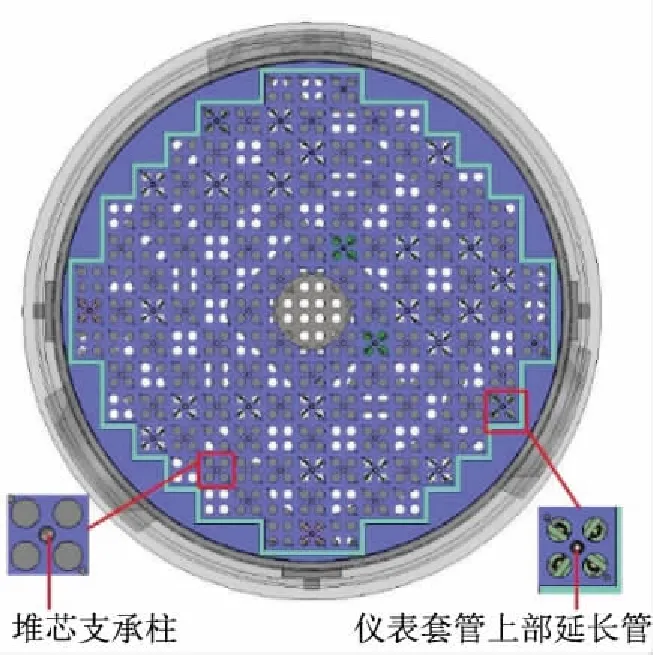
圖2 下部堆內構件俯視圖Fig.2 Top view of the lower reactor internals
反應堆下部堆內構件支撐板上方異物抓取的區域如圖3所示,為下堆芯板組件與堆芯支撐板之間的圓柱形封閉區域,該封閉區域所形成的空間內部直徑為φ3 397.2 mm,高度為691.97 mm(即下堆芯板組件和下堆芯支承板之間的距離為691.97 mm)。該區域內分布有68根堆芯支承柱和28根儀表套管的上部延長管。
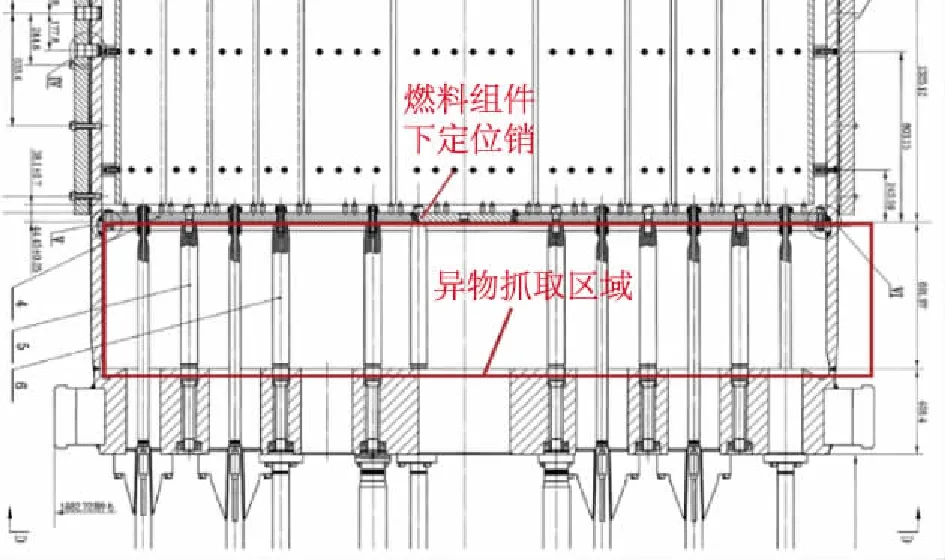
圖3 堆芯支撐板上方異物抓取區域Fig.3 Foreign bodies grasping region above the reactor core support plate
堆芯下柵格板分布有157組圓孔,每組包含4個圓孔,共628個圓孔,圓孔的直徑為φ69.85 mm,每個圓孔距離縱橫坐標軸線的距離均為50.8 mm。下堆芯板組件上每組圓孔旁邊均有2個燃料組件下定位銷,定位銷通過螺母牢固地連接在下堆芯板組件上,并凸出47.5 mm高。儀表套管上部延長管通過M32螺母與下堆芯板組件連接在一起,儀表套管凸出下堆芯板上部最大高度為40 mm,M32螺母的對邊長度為57.15 mm。堆芯支承柱與下柵格板組件之間通過M32的螺釘連接在一起,連接后僅有螺釘的頭部凸出下堆芯板,M32螺釘的頭部圓柱直徑為φ47.3 mm,高度為31.57 mm。M32螺釘凸出部分直徑和寬度均小于儀表套管上部M32螺母,只要異物抓取工具能夠避開儀表套管上部M32螺母,就能避開螺釘頭部。
因此,異物抓取工具要求通過628個φ69.85 mm圓孔覆蓋整個異物抓取區域,而且不與燃料組件定位銷、儀表套管上部M32螺母發生干涉。
2 異物抓取方案
對于異物位于堆芯下柵格板下支撐板上方情況,由于下柵格板孔直徑小,而且下柵格板表面結構復雜,無法采用傳統異物抓取工具或者異物抓取機器人,只能采用水下三軸機械臂通過下柵格板孔進行抓取的方案。利用加長桿使機械臂精確穿過下柵格板孔并且落坐在下柵格板上,操作人員在20m平臺遠程控制機械臂動作,借助攝像頭觀察機械臂手爪與異物相對位置,通過控制機械臂手爪運動至異物附近的適當位置,然后通過機械臂手爪鎖緊實現異物抓取,最后機械臂以豎直姿態退出異物抓取區域。整個抓取過程中攝像頭清晰觀察周圍環境和相對位置。
異物抓取設備主要由水下機械臂和輔助設備組成。總體方案如圖4所示。

圖4 異物抓取設備總體方案Fig.4 The overall solution of foreign bodies grasping
如圖5所示,異物抓取臂采取三軸結構,關節1可360°旋轉且升降運動,關節2可偏轉0~α運動,關節3隨動保持豎直狀態,這樣可保證異物抓取機械臂可覆蓋下柵格板孔下方圓柱形區域。為了保證機械臂利用已有628個圓孔可覆蓋支撐板所有區域,經過分塊分析機械臂水平方向運動半徑≥121 mm,取為121 mm,同時關節2最大偏轉角不宜過大,選擇為45°,那么關節2臂長為:
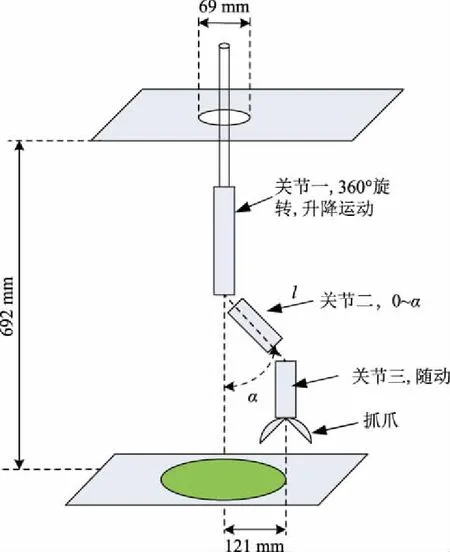
圖5 異物抓取機械臂運動設計Fig.5 Movement design of the foreign bodies grasping arm
3 機械臂結構設計
異物抓取機械臂主要由傳動箱、機械臂總成(手臂)、手爪組成,結構如圖6所示。傳動箱內包括升降機構、旋轉機構、擺動機構;機械臂總成為開放、三段式純機械結構,包括關節一、關節二、關節三。
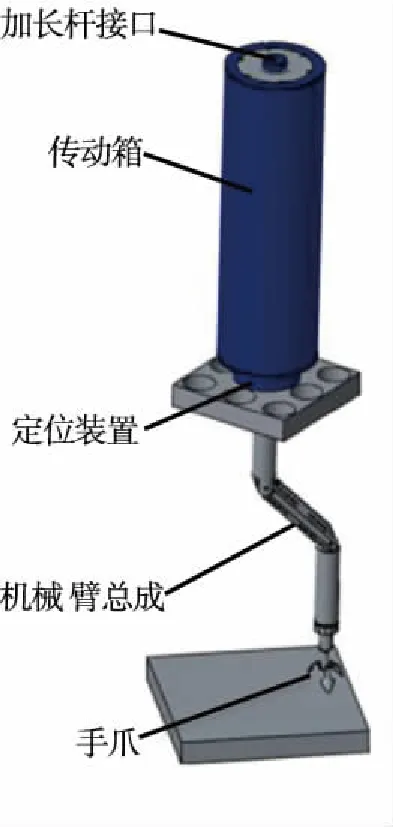
圖6 異物抓取機械臂結構Fig.6 Structure of the foreign bodies grasping arm
異物抓取機械臂總成可保持豎直姿態經過下柵格板孔達到堆芯支撐板上方空間。傳動箱為封閉式箱體,包括三軸輸出動力源及相應電氣控制組件。傳動箱通過有線拖纜與地面上的控制上位機和電源相連。控制上位機接收控制終端操作指令,解析運算后傳輸至機械臂控制箱執行。
關節一具備旋轉和升降動作,關節二具備偏轉動作,關節三跟隨關節一和關節二動作,永遠保持豎直狀態。關節三保持隨動,既可以減少一個自由度控制,又便于在不發生干涉情況下實現異物抓取。
3.1 旋轉動作
異物抓取機械臂的旋轉機構,由內軸、被動輪、主動輪、同步帶、主動電機、減速箱、軸承座及支架組成。該機構為機械臂的旋轉動作提供旋轉動力。
安裝在支架上的電機及減速箱帶動主動輪,通過同步帶驅動被動輪回轉,實現機械臂的回轉。減速箱的大減速比,保證了主動端的低速大扭矩;通過伺服電機的精確控制,實現機械臂的周向精確定位。此結構設計使得機械臂可以穿過下柵格板φ69 mm的孔洞,同時使位于下柵格板與堆芯支撐板之間的三段軸臂可周向旋轉。
3.2 升降動作
異物抓取機械臂的升降機構,由傳動箱上端蓋、直線模組安裝支架、直線模組、直線模組滑塊、直線模組驅動電機及減速箱、軸承座及支架組成。該機構為機械臂的升降運動提供動力。
傳動箱上蓋通過加長桿與水上支撐定位設備連接,為機械臂起到初始定位與(下柵格板)孔間移動的作用。直線模組安裝支架安裝在傳動箱上蓋底部,直線模組、安裝支架、傳動箱上蓋均精確安裝定位。直線模組通過帶減速箱的伺服電機驅動,其滑塊與機械臂軸承座聯接上下移動。伺服電機提供直線模組的動力源,機械臂的升降位移通過其精準控制。
3.3 偏轉動作
如圖7所示,異物抓取機械臂的偏轉機構由關節一和關節二組成,包括偏轉電機、電機連接座、聯軸器、內軸、外殼、齒輪1、支撐環等。偏轉電機通過螺釘固定在電機連接座上;偏轉電機通過聯軸器與內軸上端連接在一起;將內軸套入機械臂外殼內并將電機連接座安裝在關節一外殼上;齒輪1穿入關節一外殼下端的孔內并套在內軸下端上,利用緊定螺釘將齒輪1和內軸固定在一起;為了保證齒輪1相對于關節一外殼轉動順暢,在齒輪1和關節一外殼的配合面之間設計有支撐環。

圖7 異物抓取機械臂偏轉動作機械結構Fig.7 Deflection structure of the foreign bodies grasping arm
關節二主要包括關節二外殼、內軸、齒輪2、齒輪3、齒輪4、支撐環和密封圈等組成。內軸穿入關節二外殼內,齒輪3和齒輪4分別套在關節二外殼兩端的孔內并固定在內軸的兩端。齒輪2固定在關節二外殼上端的連接孔內,與關節二外殼成為一體,齒輪2與齒輪3相嚙合。
關節一偏轉電機轉動后即可驅動齒輪1轉動,再通過內軸傳動到齒輪2、齒輪2嚙合傳動到齒輪3,從而帶動關節二擺動。
3.4 手爪
抓爪采用水下氣缸驅動四連桿機構的工作原理,其結構簡單,可靠性高。抓爪結構及合攏狀態如圖8所示。手爪的三根手指可起到自動定心的作用,避免了夾取條形異物需要調整手爪方位的困難。手爪和第三關節的連接可快速拆裝,可根據特定的異物換用其他形式的手爪。基于同樣原理設計二根手指的抓爪,用于抓取不同類型的異物。

圖8 抓爪結構及合攏狀態Fig.8 Gripper structure and its close statue
3.5 定位結構
由于異物抓取機械臂在水下20 m處作業,長度過長會導致下方波動過大,因此,必須設置相對固定機構使機械臂不發生晃動。在傳動箱下方設置定位裝置即密封壓蓋(見圖9)使機械臂坐落在支撐板上,該密封壓蓋設有一段圓錐段,利于壓蓋中間的圓柱體導入下柵格板孔內,圓柱體的外徑略小于φ69 mm的板孔徑,取為φ68 mm。圓柱體導入后,可使機械臂相對下柵格板不發生水平擺動。機械臂依靠自重在重力作用下,能可靠地壓在下柵格板上。機械臂在定位裝置的作用下,可相對于下柵格板孔可靠定位且不隨意移動。
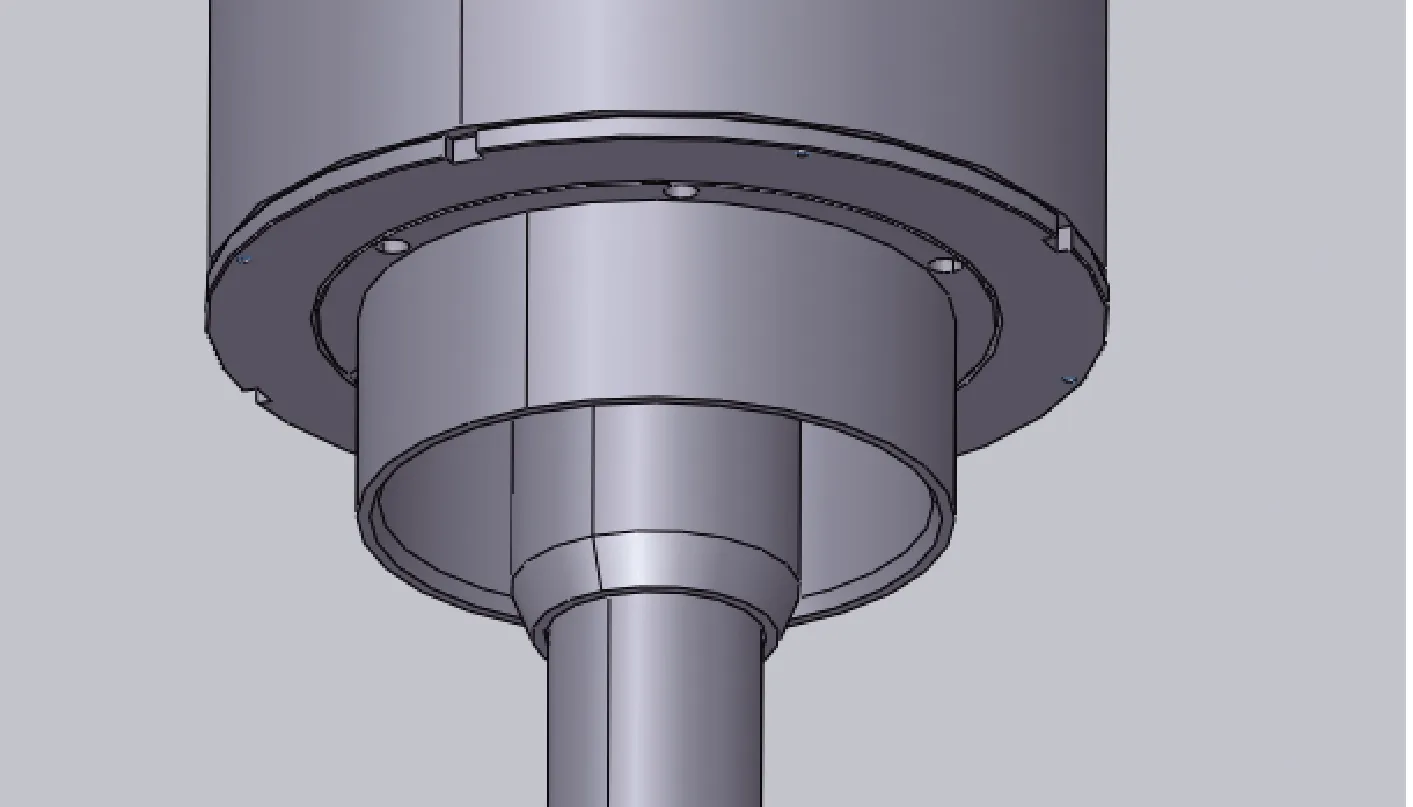
圖9 機械臂的定位結構Fig.9 Fixed structure of the foreign bodies grasping arm
整個機械臂穿過下柵格板上φ69 mm孔坐落在下柵格板上時,必須避讓下柵格板上的燃料組件定位銷以及儀表套管上部M32螺母凸出部分。定位結構外圈尺寸涵蓋燃料組件定位銷,而避開儀表套管上部M32螺母凸出部分。φ69 mm孔中心距離定位銷外圓最大距離為60.3 mm,定位銷高度為47.5 mm。因此,定位結構的內徑設計為φ130 mm(半徑為65 mm),高度為50 mm,機械臂在定位的過程中能夠有效避開障礙物。
4 模擬試驗
異物抓取機械臂樣機如圖10所示,在堆芯下部構件模擬體上進行異物抓取試驗,在5個不同位置擺放4種異物,并借助攝像系統完成抓取過程。
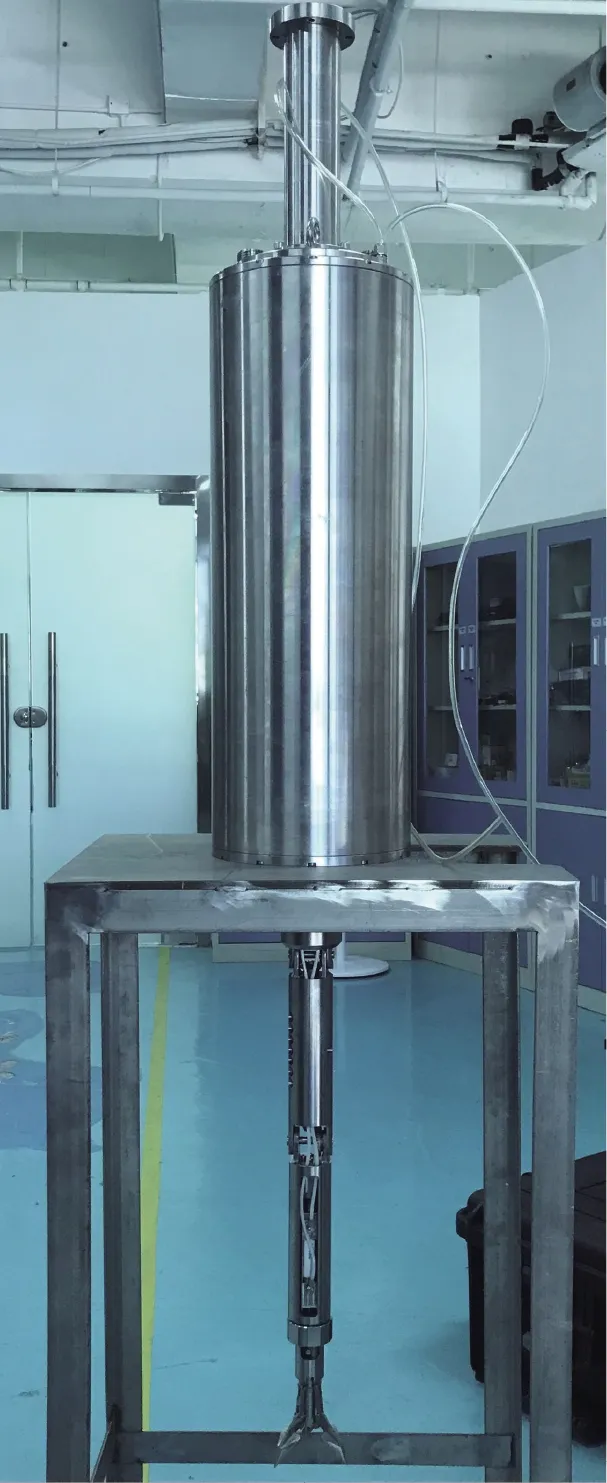
圖10 異物抓取機械臂樣機Fig.10 The prototype of the foreign bodies grasping arm
20次試驗異物都被成功抓取,螺釘和端子異物抓取成功如圖11所示,說明異物抓取機械臂功能可靠而且有效,可以覆蓋支撐板上方所有區域。

圖11 不同異物抓取成功Fig.11 The successful grasping of different foreign bodies
5 結論
對于堆芯支撐板上方異物,不存在一種可行異物打撈解決方案。針對此復雜空間域提出一種基于三關節機械臂的異物抓取方案,機械臂利用下柵格板孔進入異物抓取區域,再結合旋轉、升降、偏轉和抓爪開合動作實現復雜空間的異物抓取。設計、加工制造一套復雜空間異物抓取機械臂,在堆內構件模擬體上進行不同位置多種異物抓取試驗,機械臂都成功抓取異物,驗證了異物抓取方案的可行性,以及異物抓取機械臂的安全性、可靠性。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
