
基于粒子群的反應堆控制系統優化
2020-06-24 03:33:24孫劍,俞赟,張瑞
中國核電 2020年2期
孫 劍,俞 赟,張 瑞
(中國核動力研究設計院 核反應堆系統設計技術重點實驗室,四川 成都 610041)
反應堆控制系統(Reactor Control System,RRC)的作用是控制反應堆安全、有效地運行,使得核蒸汽供應系統生產出合格、適量的蒸汽,以實現核能向機械能、電能的轉化。在整個反應堆儀表與控制系統(I&C)中,RRC處于核心地位,是反應堆設計的重要技術領域之一。現有的主流壓水堆堆型,RRC系統都是基于經典控制理論進行設計,從結構到參數都大同小異。控制通道基于反饋、單回路、串級、前饋等經典控制理論進行設計,系統優化使用線性系統穩定性分析理論,用頻域指標界定系統的瞬態性能,從而尋找最優化控制系統參數。
本文針對反應堆控制系統參數優化問題,提出了一種新的優化設計方法,從優化結果和操作的簡易性上都要優于現有的工程方法,并且使用時不用完全替代老方法,方便在工程上使用。為了說明該方法的操作流程和效果,以穩壓器壓力控制為實例,編制了完整的程序,對比了兩種方法的優化過程及結果。
1 總體結構反應堆控制系統參數優化
問題
控制系統參數是通過對單個系統進行仿真優化得出,現有的工程優化方法具體操作流程如下:通過選定幾組可能的控制器參數及控制通道整定值,分別分析其經典控制理論頻域指標(如Nichols曲線所揭示的幅值增益、相位增益等),以判斷不同參數組合下線性系統的時域性能(超調量、調節時間等),通過分析和比對,找出優化后的各控制系統整定值。
在使用頻域指標考察控制系統的時域性能時,主要考慮幅值增益和相位增益指標。簡單的來說,幅值增益小于0 dB,則系統不穩定;相位增益小于0°,則系統不穩定。RRC系統的分析不僅要求系統穩定,更要求系統具有一定的穩定程度,即考慮系統參數不確定性情況下,系統仍然是穩定的,時域指標也是接近最優的。這就要求RRC系統的參數設置要使幅值增益和相位增益合適,因為幅值增益越大,系統的響應越遲緩;相位增益越大,系統越震蕩、調節時間越長;相位增益越小,超調量越大。
進一步分析,幅值增益揭示了RRC系統的閉環增益增大多少倍,系統開始變到臨界穩定和不穩定狀態。一般來說,幅值增益應大于6 dB。對于如式(1)所示的典型二階系統,其相位增益可以表達為式(2)。
(1)
式中:ωn——無阻尼震蕩角頻率;
ξ——阻尼系數。
(2)
式中:φ——相位增益。
對于2階系統,超調量可以表示為式(3):
(3)
因此,可以通過相位增益φ求出阻尼系數ξ,進而求出超調量σ。為了折中考慮超調量和調節時間性能,應盡量使相位增益φ在30°~60°。
當RRC各控制系統整定值均已優化完成之后,需要對RRC所有控制系統進行聯合仿真分析(反應堆對象使用數字化仿真模型),以確定各控制系統在相互配合時,整個反應堆控制系統性能指標得到了滿足,并且驗證RRC系統能夠應對電廠正常運行瞬態(階躍變化10%FP的瞬態、線性變化5%FP/min的瞬態、汽機甩負荷到廠用電瞬態和緊急停堆瞬態),不會觸發保護系統動作。
2 設計特點傳統參數優化方法的不足及最優化改進
傳統參數優化方法在解決反應堆控制系統參數優化問題時,需要解決頻域指標和時域指標的復雜對應關系,操作起來較為復雜,且參數組合的選取采用人為試湊方式,不能涵蓋所有可能的控制系統參數組合。RRC控制系統優化的結果是一組相對優化的參數組合,并非最優化參數,這也是傳統參數優化方法的不足之處。
這是由兩方面原因引起。一方面,20世紀60年代,計算機還不夠普及,計算性能也不夠強大,還無法通過高效地計算控制系統動態響應的方式進行參數優化,只能使用頻域計算間接推斷控制系統的時域性能。在最初的頻域分析時甚至只能通過手繪方式計算Nichols曲線,而以這種方式完成RRC系統的優化將是十分龐大的工作量。再者,當時情況下,工業領域可選擇的控制領域的理論工具十分有限。對于反應堆控制系統參數優化問題,研究使用群體智能算法來求解將是一個很好和可行的嘗試。這樣做優點是顯而易見的,首先是可以對一個大的參數范圍進行搜索,其次充分利用計算機的能力,直接用時域響應作為評判指標,從而得到一組最優化的控制系統參數。
3 基于粒子群算法的反應堆控制系統最優化
3.1 粒子群優化算法簡介
粒子群優化算法是基于群智能方法的演化算法,由美國社會心理學家Kenndy和電氣工程師Eberhar于1995年提出。基本概念源于對鳥群捕食行為的研究,鳥群在飛行過程中經常會突然改變方向、散開、聚集,其行為不可預測,但整體總保持一致性,個體與個體之間也保持著最適宜的距離。研究發現,鳥僅僅追蹤它有限數量的鄰居,但最終的整體結果是整個鳥群好像在一個中心的控制之下,即復雜的全局行為是由簡單規則的相互作用引起的,生物群體之間存在著一種社會信息共享機制,為群體的進化提供了一種優勢。使用計算機模擬鳥群的覓食行為,可用于解決優化問題。基本原理如下:問題的解對應于搜索空間中粒子的位置。每個粒子有自己的位置和速度(決定飛行的方向和距離),還有一個由被優化函數決定的適應值。各個粒子記憶、追隨當前的最優粒子,在解空間中搜索。每次迭代的過程不是完全隨機的,如果找到較好解,將會以此為依據尋找下一個解。
算法描述如下:隨機初始化一群粒子,其中第i個粒子在D維解空間的位置表示為xi=(xi1,xi2,…,xiD)。每一次迭代,粒子通過動態跟蹤兩個極值來更新其速度和位置。第一個是粒子從初始到當前迭代次數搜索產生的最優解:個體極值pBesti=(pi1,pi2,…,piD);第二個是粒子種群目前的最優解:全局極值gBest=(g1,g2,…,gD)。第i個粒子根據以下公式來更新其第d維(1≤d≤D)速度和位置:
vid=wvid+c1r(pid-xid)+c2R(gd-xid)
(4)
xid=xid+vid
(5)
式中:v——粒子速度;
x——粒子位置;
w——為避免粒子在全局最優解附近震蕩的可變慣性系數;
r,R——均勻分布在(0,1)區間的隨機數;
c1,c2——學習因子。
粒子在解空間內不斷跟蹤個體極值和全局極值進行搜索,直至達到規定的迭代次數或滿足規定的性能指標為止。算法流程如圖1所示。
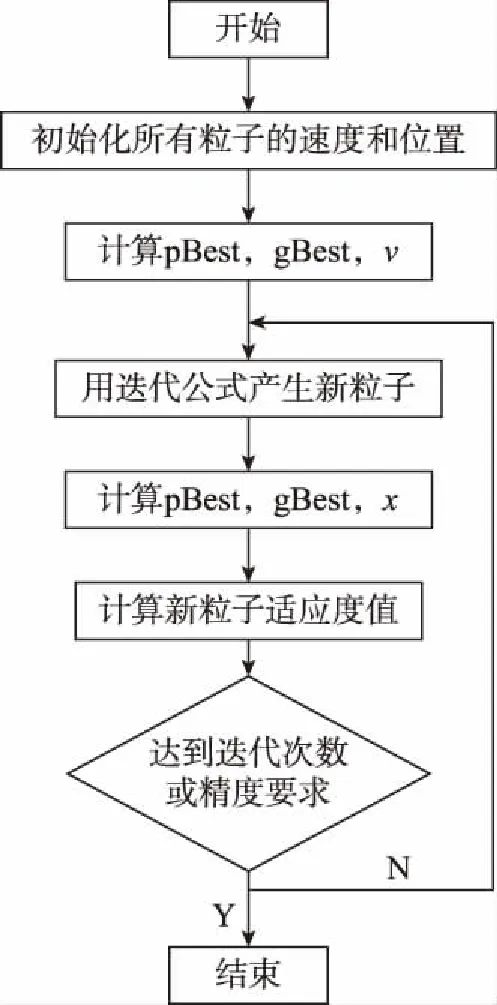
圖1 粒子群優化算法計算流程Fig.1 Calculation flow of particle swarm optimization algorithm
3.2 適應度函數
利用粒子群算法進行RRC系統參數優化時需要計算某種參數組合情況下系統的適應度值,即系統在給定控制通道參數作用下的響應性能評價。對于一般的最小相位系統,階躍響應中包含的上升時間、超調量、穩態偏差等指標足以用于評價系統的性能。為了便于計算機編程,設計如式(6)所示的指標,用于表征系統的時域性能。

(6)
式中:e(t)——控制偏差;
t——時刻;
J——適應度函數值。
該指標對初始誤差考慮較少,而主要限制過渡過程后期出現的誤差,即控制系統評價考慮的是對誤差的消除能力再加上時間的懲罰項。該指標綜合了上升時間、超調量、穩態偏差等指標,J值最小的控制系統參數可被看作是最優化的控制系統參數,而控制參數最優化的迭代過程則由粒子群算法解決。
3.3 控制通道的高速計算機仿真
使用粒子群優化控制系統參數時,計算量大,粗略估算總耗時為:每一次控制參數性能評價時間、粒子群種群規模和最大學習代數三者的乘積。對于每一次控制參數性能評價,需要計算控制通道的階躍響應,而對反應堆控制系統涉及的大部分對象,至少需要計算600~1 000 s范圍內系統的響應才有意義。由此可見,使用粒子群算法進行反應堆控制系統參數優化的計算量十分龐大,若算法設置不合理,將導致整個優化過程漫長。
本文在進行控制通道階躍響應計算時,沒有直接利用連續系統離散化的現成軟件包,而是采用對復雜傳遞函數進行技巧性拆分,分成基本環節的組合,然后利用離散相似法計算得出快速運算的差分方程。這樣做的優點是便于編制計算機迭代程序,提高運算速度。
例如,圖2所示的復雜傳遞函數:

圖2 復雜傳遞函數的拆分Fig.2 Splitting of complex transfer functions
對于積分環節有式(7),其中ts是采樣周期。
x2(k+1)=x2(k)+k·x1(k)×ts
(7)
(8)
根據離散相似法公式:
x(k+1)=eAts·u(k)+

(9)
當采用零階保持器時,慣性環節的差分方程可以寫為:
(10)
(11)
利用上述,圖2的控制通道就能在計算機上進行高速仿真。
4 實例分析
4.1 穩壓器壓力控制系統優化問題描述
下面以國內典型三環路M310機組的穩壓器壓力控制系統優化為例,說明控制系統參數優化的過程。簡化的控制邏輯如圖3所示,控制目標是在正常運行瞬態將穩壓器壓力控制在15.5 MPa abs,而不引起停堆或穩壓器安全閥開啟。控制手段有兩個,2組比例式電加熱器通過增加水的閃蒸來提高穩壓器壓力,兩條噴淋管線通過控制冷水噴淋流量來降低壓力。兩個非線性環節用來使得電加熱器和噴淋流量按順序投入運行。
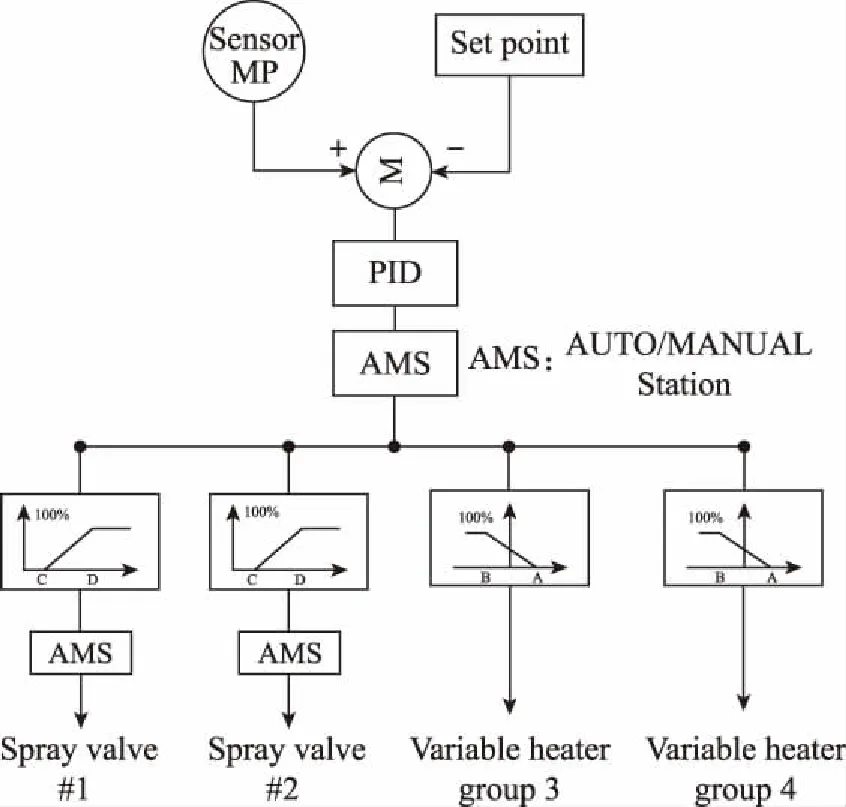
圖3 穩壓器壓力控制簡化邏輯圖Fig.3 Simplified logic of pressure control for the pressurizer


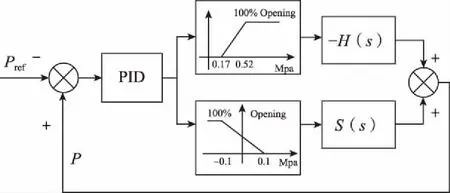
圖4 穩壓器壓力控制參數優化完整框圖Fig.4 Complete block diagram of pressure control parameter optimization of the pressurizer
4.2 基于古典控制理論的參數優化
使用電加熱器改變穩壓器壓力是一個緩慢的過程,而噴淋相對而言快速得多。因此,可以大致將優化過程分成兩步進行。首先不考慮微分作用(即微分項置為0),只考慮電加熱器的動作來優化積分項,主要考察控制系統消除壓力穩態偏差的能力。人為選取三組積分常數值(100 s,600 s,1 000 s),繪制控制通道Nichols曲線如圖5。

圖5 積分項優化Fig.5 Integral term optimization

表1 控制器積分項幅值、相位增益表
可見,積分項的選取不會顯著改變幅值增益,但會顯著影響相位增益。積分項的目的是消除穩態偏差,壓力控制并不需要大的積分項,以便開關式電加熱器不會頻繁開啟,且控制通道應避免阻尼震蕩,因此選取600 s較為合適。
在積分項確定之后,第二步優化PID控制器的微分項,這主要通過對噴淋系統的分析,確定控制系統具有良好快速性的微分時間。限于篇幅,這里不再論述,優化的結果是λ=1.25,τ22=5 s。
4.3 基于粒子群算法的智能參數優化及對比分析
使用智能參數優化時,不需要針對電加熱器控制通道和噴淋控制通道單獨優化,因為這兩個通道的特性已經包含在他們的對象模型中,再者分開優化也不好界定兩個通道之間的影響程度,這也是相對于古典控制理論優化更合理的地方。
學習代數設定為最大30代,學習系數設定為典型值2.05,慣性權重設定為0.729。迭代過程適應度的變化過程如圖6,優化結果為τ21=867 s,λ=2.6,τ22=6.8 s。
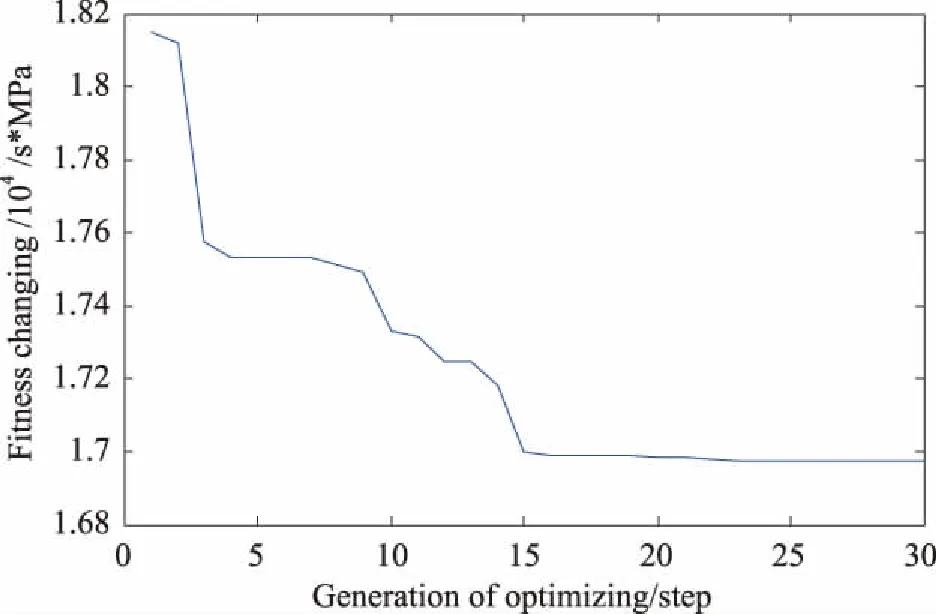
圖6 迭代過程適應度變化Fig.6 Change of fitness in iterative process
為了比較兩組參數的優劣,分別仿真壓力設定值階躍+0.2 MPa和-0.2 MPa時兩組控制參數的控制系統響應效果,對比曲線見圖7和圖8。其中,壓力階躍-0.2 MPa時,噴淋和電加熱器同時起作用。從圖中可以看出,根據古典控制理論優化出來的PID參數效果良好,但不是最優參數,粒子群算法優化的參數在超調量指標上有明顯改進,優于現有工程方法的優化結果。
對于實際工程來說,優選出來的PID參數還應考慮開關式電加熱器的動作,而這可以通過控制系統聯調來測試其性能。限于篇幅,這里不再論述。
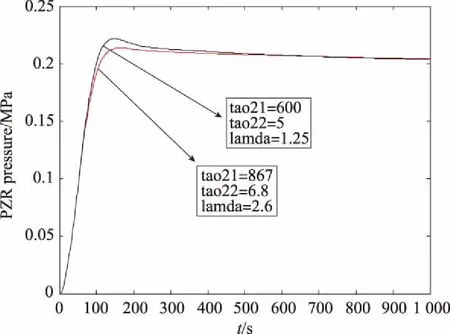
圖7 兩組PID參數控制效果對比Fig.7 Comparison of control effects of two groups of PID parameters
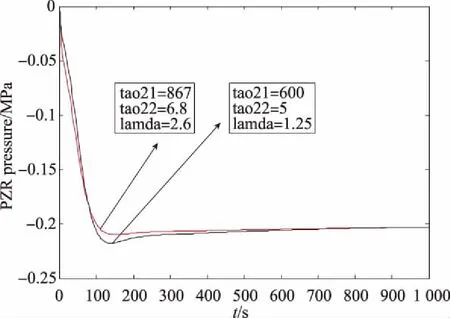
圖8 兩組PID參數控制效果對比Fig.8 Comparison of control effects of two groups of PID parameters
5 結論
隨著計算機的出現和處理能力的提升,幾乎所有工業領域都產生了革命性發展。反應堆控制系統設計也應緊跟潮流,一方面利用計算機的能力提升設計水平,另一方面在過程控制中改進整個系統的性能。
本文論述了反應堆控制系統參數優化的過程和理論,闡明了現有的工程優化方法及其不足之處,提出了基于粒子群優化的新方法。該方法利用現代計算機高速計算的能力,對反應堆控制系統的參數進行最優化搜索。相對于目前工程中使用的方法,新方法能夠做到最優化設計,且優化過程更為直接、直觀,并且以穩壓器壓力控制系統的優化為例,測試了新方法的有效性,為工程使用打下了基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
